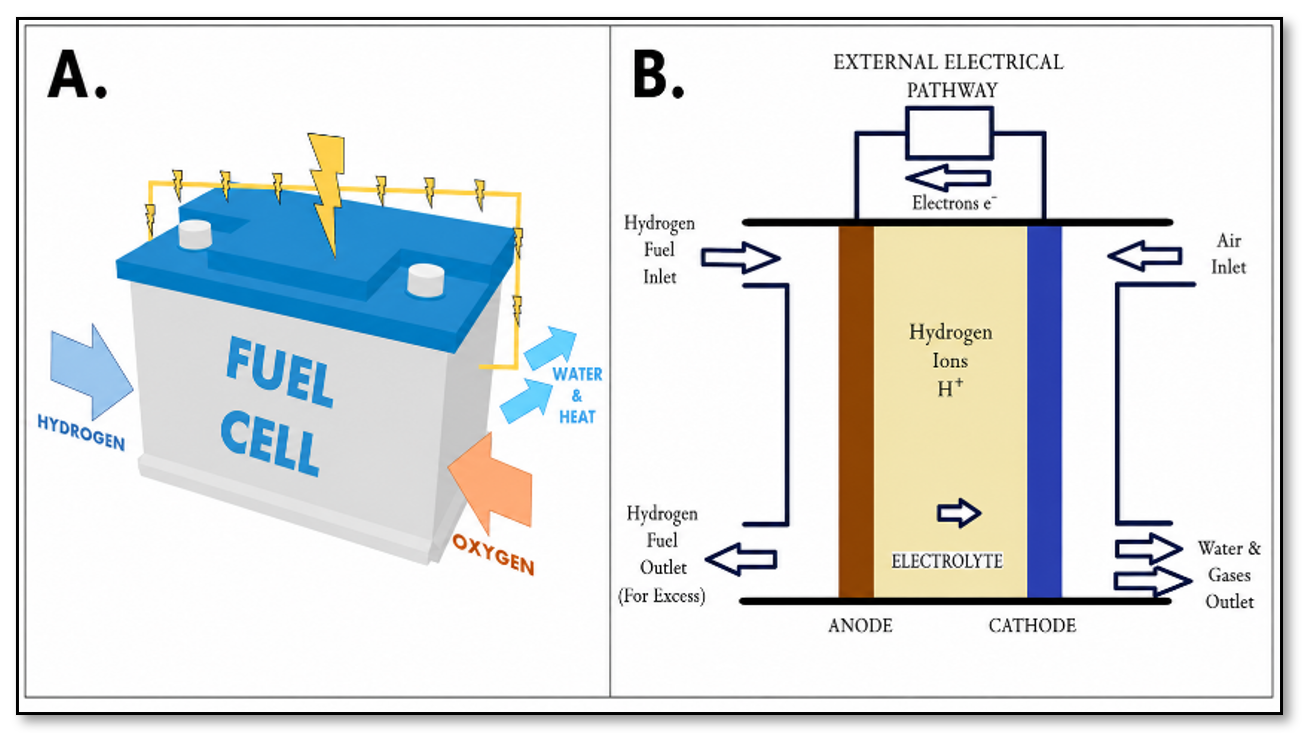
Unmanned aerial vehicles (UAVs) are increasingly used in applications such as agriculture, logistics, mapping, surveillance, and environmental monitoring. However, the limited battery endurance continues to restrict mission duration and operational range. This review examines two sustainable propulsion alternatives, hydrogen fuel cells and solar-powered systems, based on findings reported in the literature. Evidence from peer-reviewed studies, experimental demonstrations, and industrial reports published between 2009 and 2024 is considered. Key parameters, including endurance, payload capacity, and operational altitude, are compared, along with practical aspects such as hydrogen storage, thermal management, and energy control systems. The available data suggest that hydrogen fuel cell (HFC) drones are better suited for low to mid-altitude missions requiring higher payload and rapid refueling. Solar-powered drones are more effective for long-endurance and high-altitude applications under favorable solar conditions. Future developments are expected to focus on hybrid propulsion systems, improved materials, and more efficient energy management strategies.
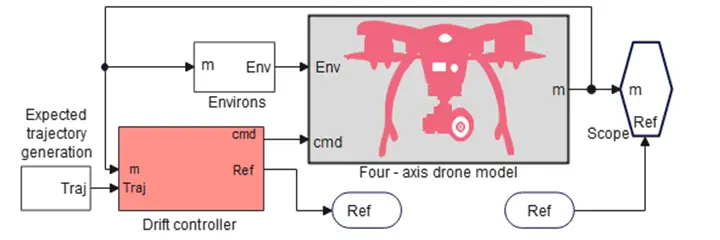
In this study, the trajectory planning and control problem for quadrotor unmanned aerial vehicles (UAVs) in logistics-oriented delivery scenarios. A smooth trajectory generation method based on spline curves is proposed to ensure continuous, stable, and feasible flight paths for quadrotor UAVs under dynamic constraints. The proposed method focuses on general UAV path planning rather than a specific express delivery optimization problem. A simulation platform is developed to evaluate the effectiveness of the trajectory planning and control framework, where a PID-based controller is implemented for trajectory tracking and attitude stabilization. The performance of the proposed method is validated through two representative emergency delivery scenarios, demonstrating accurate path tracking and stable flight behavior under environmental disturbances. The results indicate that the proposed framework provides a reliable simulation tool for UAV trajectory planning and control analysis, contributing to general UAV motion planning research rather than a specific delivery optimization formulation.
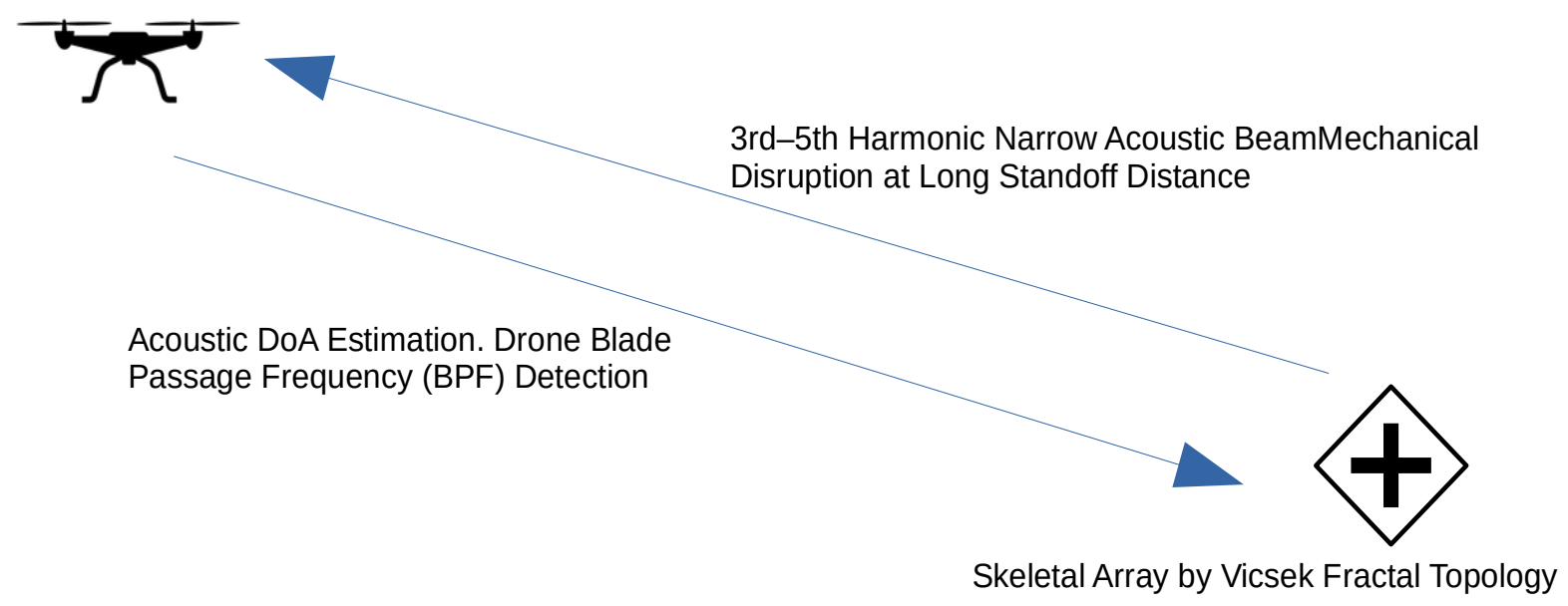
Acoustic waves can affect two important components of multi-rotor drones, more formally called multi-rotor unmanned aerial vehicles (UAV). The first is located in the electronic board, the so-called IMU (Inertial Measurement Unit), which can be influenced by intense sound waves at resonant frequency. The second is the motor-propeller unit of drones. Multi-rotor drones generate low-frequency acoustic emissions during flight; if external acoustic waves achieve resonance with these blade-induced vibrations, they can cause structural fatigue or mechanical failure in the motor-propeller unit. The paper addresses the following issues: first, the influence of resonant frequency sound waves on these two design elements and their performance evaluation; second, the feasibility of an integrated counter-UAV system comprising acoustic Direction of Arrival (DoA) estimation and Blade Passage Frequency (BPF) detection; and third, a new solution for a long-range directional sound effector. This proposed solution includes determining the operating frequency as the 3rd to 5th harmonics of the BPF. Furthermore, it introduces a new concept that, instead of using a standard array of sound drivers, utilizes a limited quantity of powerful drivers arranged skeletally according to a Vicsek fractal topology. This configuration generates a powerful, needle-like acoustic beam capable of delivering effective mechanical disruption multi-rotor drones at long ranges.
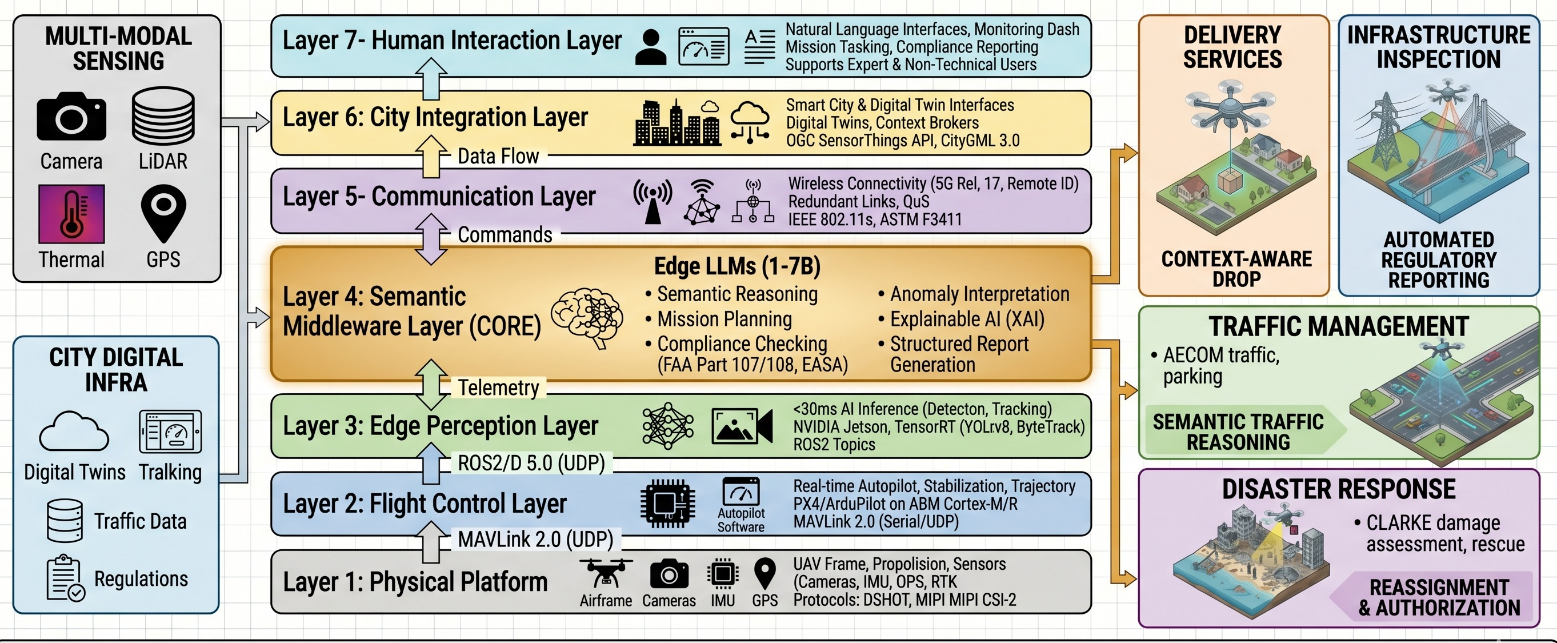
Despite a rapid rise of AI-powered Unmanned Aerial Vehicle (UAV) deployments in smart city environments, current surveys and frameworks lack a unified, protocol-level reference architecture that integrates multi-domain applications, edge AI perception, cognitive reasoning through Large Language Models (LLMs), and regulatory compliance within a single deployable specification. This study presents a comprehensive cross-domain review of AI-powered drone systems for traffic management, delivery, infrastructure inspection, disaster response, and environmental monitoring. The study introduces COMPASS (Cognitive Operations Model for Programmable Autonomous Smart-city Systems), a novel seven-layer technical reference architecture that describes communication protocols (MAVLink 2.0, ROS2/DDS, MQTT 5.0, and NGSI-LD), edge computing hardware recommendations for five drone payload tiers, and quantified performance requirements for safety-critical operations. The key feature of COMPASS is its LLM-based Semantic Middleware Layer, which allows for context-aware decision-making, natural human-drone interaction, and regulatory compliance verification. Comparing COMPASS to many other frameworks reveals that it is the only architecture to simultaneously provide multi-domain coverage, protocol-level specifications, hardware recommendations, LLM integration, and empirically verified benchmarks.
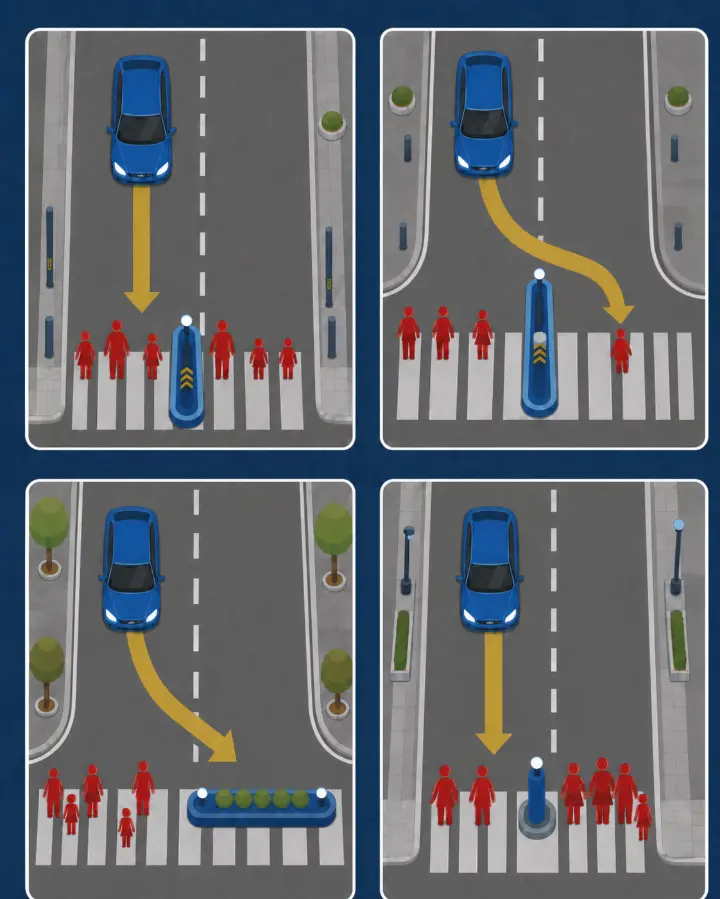
While rare, it is widely accepted that autonomous vehicles (AVs) will find themselves in dilemma scenarios involving vulnerable road users (VRUs). The ethics of these dilemma situations have been debated extensively in the context of trolley-problem-like scenarios. What has not been noted is the inherent unfairness implicit in many of these discussions, in which VRUs are seen as passive bystanders with no say in what befalls them. Rather than simply remaining still in a collision scenario, VRUs can (and often do) take action that needs to be accounted for. If we are to increase fairness on public roads, it is important that AVs communicate with VRUs. This paper presents a highly theoretical discussion on the possibility of using communication tools (such as the V2X system) and techniques (derived from the science of human-machine interaction) to support protective, risk-reducing responses from VRUs during inevitable AV collisions. The paper begins with a brief ethical exploration of fairness in the context of current debates surrounding AV collisions. We proceed to discuss possible technical solutions to AV-VRU communication, as well as the types of audio, visual, and tactile communication strategies necessary in critical scenarios.
In this paper, we offer an overview of the published works dealing with fuzzy logic applied in drones, considering both theoretical works and applications in diverse areas, such as simulation, planning, and control of drones. The analysis was done considering all types of available publications, such as journal papers, chapters, and conference papers. The data were obtained by searching the Scopus database from Elsevier, which contains most of the world’s indexed publications across all areas of knowledge. Based on the obtained data, some conclusions were elaborated about the advances of fuzzy logic and its applications in drones, as well as interesting future trends for this area were delineated. In particular, as fuzzy logic has been evolving from type-1 to type-2 and more recently to type-3, the role of fuzzy systems in the area of drones is following the same evolution. We have to say this evolution has already happened in the area of controlling autonomous mobile robots, and we expect that this will also happen in the area of drones, as the navigation problem is similar to some extent. A limitation of the study is that we are only considering the evolution of fuzzy logic types, rather than other alternatives, such as intuitionistic or hesitant fuzzy theories, which could become more useful in the near future. Also, we are not studying hybrid approaches with fuzzy, like neuro-fuzzy or evolving fuzzy systems, which can be an interesting subject from the point of view of making a fuzzy system to become dynamic or adaptive.
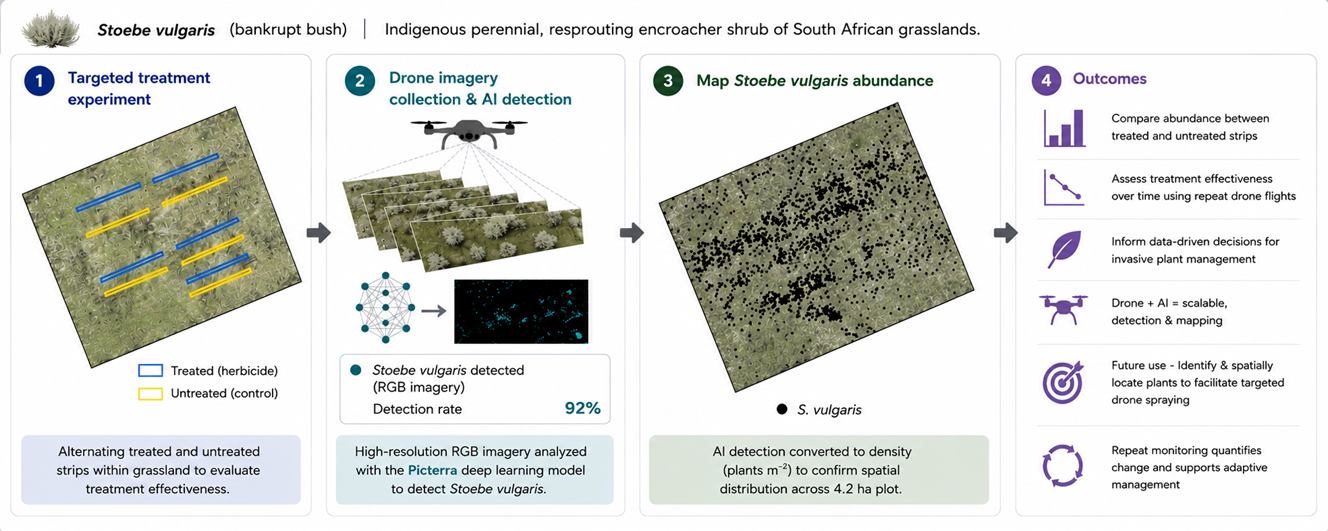
Stoebe vulgaris is a declared indigenous bush encroacher species in South Africa. It has invaded over 11 million ha of grasslands. It is commonly called bankrupt bush due to its ability to outcompete other indigenous forb and grass species, decreasing grazing capacity, biodiversity, and ecosystem functioning, eventually leading to financial ruin for farmers. Landowners are legally required to control the plant. A herbicide trial was set up in a severely encroached camp at Dundee Research Station in KwaZulu-Natal, South Africa, to test the effectiveness of metsulfuron-methyl (50 g active ingredient ha−1) in controlling S. vulgaris. Applying metsulfuron-methyl provided a significant long-term reduction in S. vulgaris cover over six years. However, effective monitoring and management strategies depend on knowledge of the spatial distribution and expansion patterns of invasive species. We evaluated the ability of UAV-based imagery and machine learning, using Picterra, to detect and map S. vulgaris, while determining the optimal parameters to maximise detection accuracy. The best season for image acquisition was late summer when vegetation was at peak growth and maturity, providing the best spectral distinction between species, under light overcast and mild wind conditions. We recommend careful consideration of the flight orientation to the solar angle. We achieved 92% detector accuracy, with multispectral imagery enhancing the discrimination of similarly coloured plants. Plants smaller than 10 cm were not detected by the model. Our approach, using high-resolution drone imagery and AI, is capable of individual plant detection suited to a farm scale. This opens the way for using advances in drone technology for targeted, spot-application of herbicide.
Thrust-vectoring UAVs can realize decoupling of position and attitude compared with conventional quadrotors due to the ability to change thrust direction, and are used to perform various complex indoor and outdoor missions. However, existing trajectory generation frameworks are mostly for quadrotors with fixed thrust direction and a coplanar surface, and do not consider the dynamics of thrust-vectoring UAVs. To address this, this paper proposes a multi-objective trajectory generation method for thrust-vectoring UAVs in constraint space. By parametrically modeling the constraint space, the method considers the effects of environmental boundary constraints and platform dynamics characteristics on the collision constraints and motion decoupling of the trajectory, and comprehensively optimizes the trajectory’s indicators of stability, speed, and safety to plan the states and input actions of the flight trajectory. Meanwhile, a trajectory generation evaluation system is proposed, given that compared with the conventional quadratic objective function, the proposed method is effective in reducing the attitude change of the trajectory, improving the rapidity and safety, in which $$L_{\theta}$$ and $$L_{r i s k}$$ are reduced by 70.4% and 19.1%, respectively. Meanwhile, by comparing with the conventional quadrotor, the advantages of the thrust-vectoring in decoupling motion are quantified, especially in reducing the attitude change during flight, the pitch angle of the generated trajectory is reduced from ±30° to within ±20° degrees, which exerts the motion decoupling advantages of the thrust-vectoring.
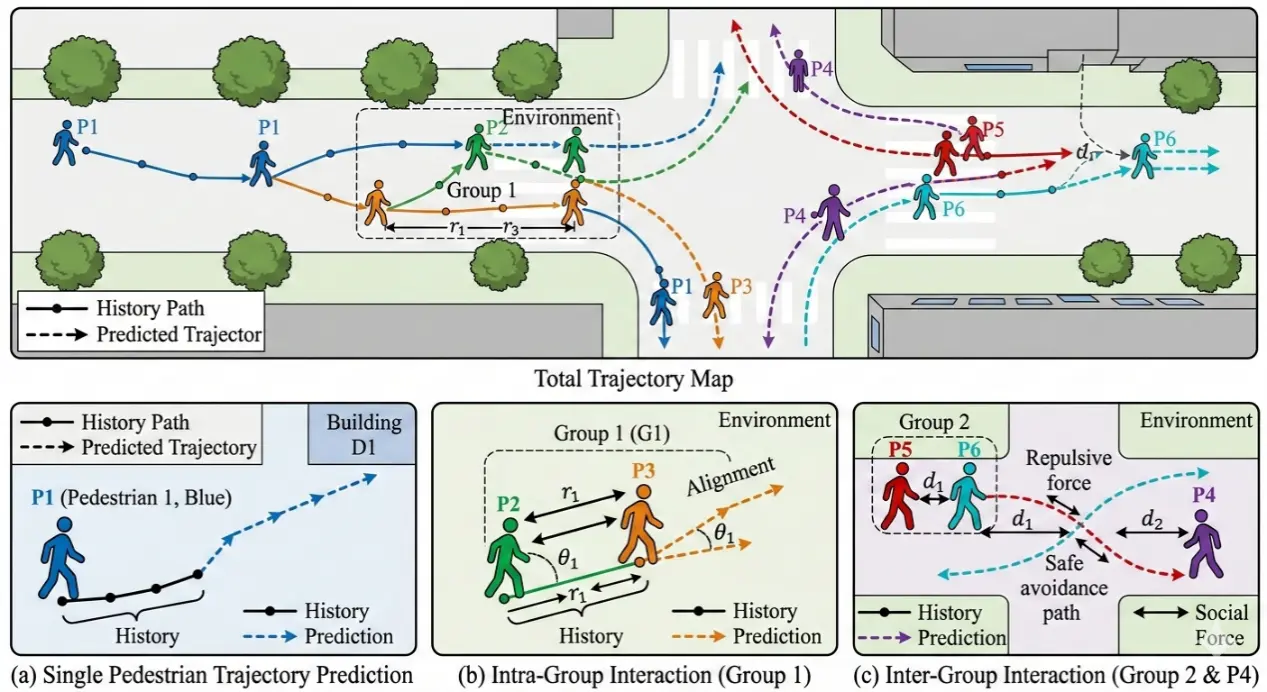
With the rapid development of autonomous driving, first-person view (FPV) pedestrian trajectory prediction has emerged as a key research direction to improve transportation system safety and operational efficiency. However, current studies ignore inter-pedestrian group information and long- and short-term dependence, leading to error accumulation at medium and long temporal horizons. To address these problems, we propose an FPV pedestrian trajectory prediction model dubbed MUGI-Net (Mixture of Universals and Group Interaction Network). It adopts a group pooling mechanism to adaptively aggregate group nodes and build sparse intra- and inter-group interaction graphs to fuse group interaction information. Afterward, it employs a Mixture of Universals (MoU) structure that combines MoF (Mixture of Feature Extractors) and MoA (Mixture of Architectures) to capture short-term dynamics and long-term dependencies simultaneously. Extensive experiments on the JAAD and PIE datasets show that MUGI-Net reduces the 1.5 s prediction MSE by 5% compared with the state-of-the-art AANet, and achieves the best performance on multiple key metrics, which is beneficial for autonomous driving in mixed traffic scenarios.
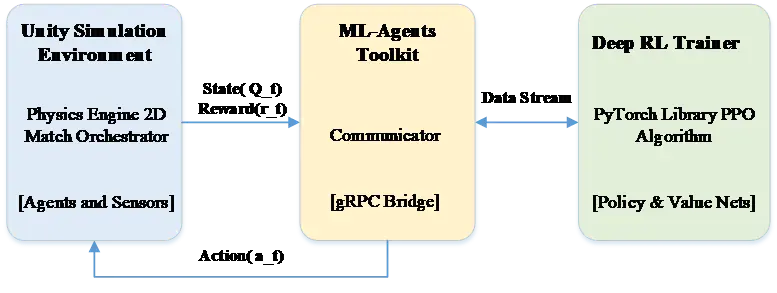
The operational utility of Unmanned Aerial Vehicles (UAVs) has evolved from passive surveillance to active engagement in disputed environments, where autonomous control must operate under highly dynamic and adversarial conditions. Hand-crafted heuristics often exhibit limited robustness when facing stochastic opponent behavior and non-stationary interactions. To address these challenges, we propose a Multi-Agent Deep Reinforcement Learning (MADRL) framework implemented in a Unity 6–based, physics-driven simulation that models flight dynamics and weapon kinematics. Agents are trained using Proximal Policy Optimization (PPO) with a composite reward function designed to encourage cooperative behaviors (e.g., coordinated target engagement) while enforcing safety constraints such as collision avoidance. In empirical evaluations, the learned policies achieve an 85% win rate against a heuristic baseline under the tested scenarios, exhibiting coordinated maneuvers and adaptive engagement strategies. These results indicate that multi-agent learning with decentralized execution can reduce operator workload and improve swarm effectiveness and survivability in conflict zone.
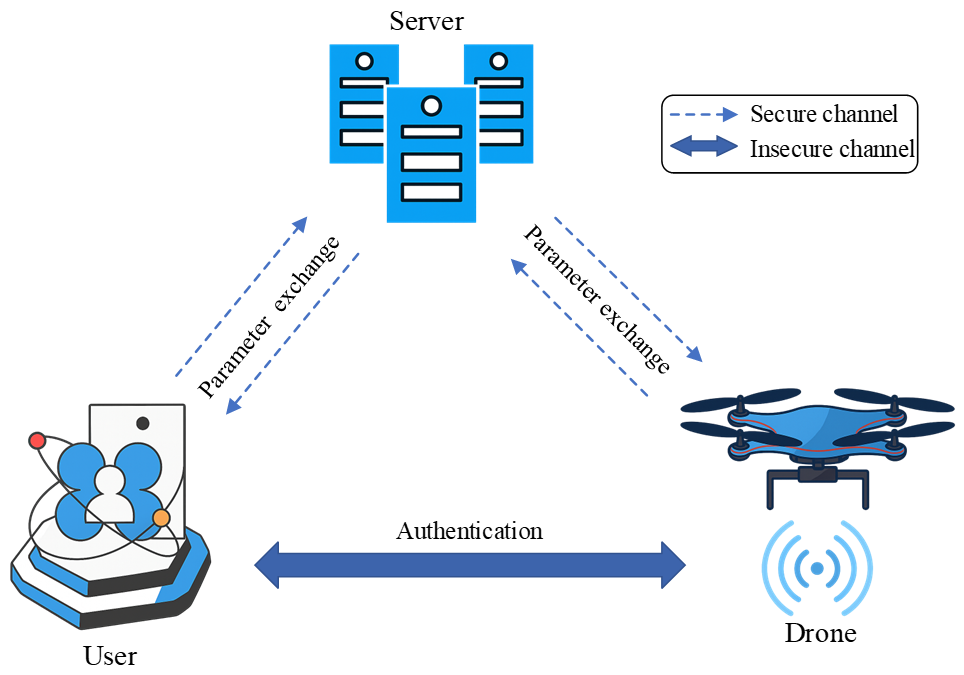
Unmanned aerial vehicles (UAVs is also known as drones) have significant applications in smart cities, and the information exchange between UAVs and the control server (CS) is conducted through wireless communication channels, which are susceptible to various security risks, such as network attacks and drone capture. To ensure the security and integrity of information in the Internet of Drones (IoD), identity authentication and key agreement protocols can be designed for protection. However, due to the unique characteristics of IoD, such as the extremely high mobility of drones in real scenarios and the resource constraints of drones, there is a need to meet the requirements for lightweight protocols. This paper proposes a strategy that uses cancelable biometric features to protect the biometric features of users during the authentication process. The method combines Fast Fourier Transform, Gaussian random projections, Position-Sensitive Hashing, fuzzy extractors, and Physical Unclonable Functions (PUF), meeting the security and lightweight needs of IoD authentication protocols. We use the Real-or-Random (ROR) model and the Avispa simulation tool to prove that our protocol is secure. Through comparative research, the proposed cancelable method has higher matching efficiency and better unlinkability, and our protocol offers higher security and faster computational efficiency.
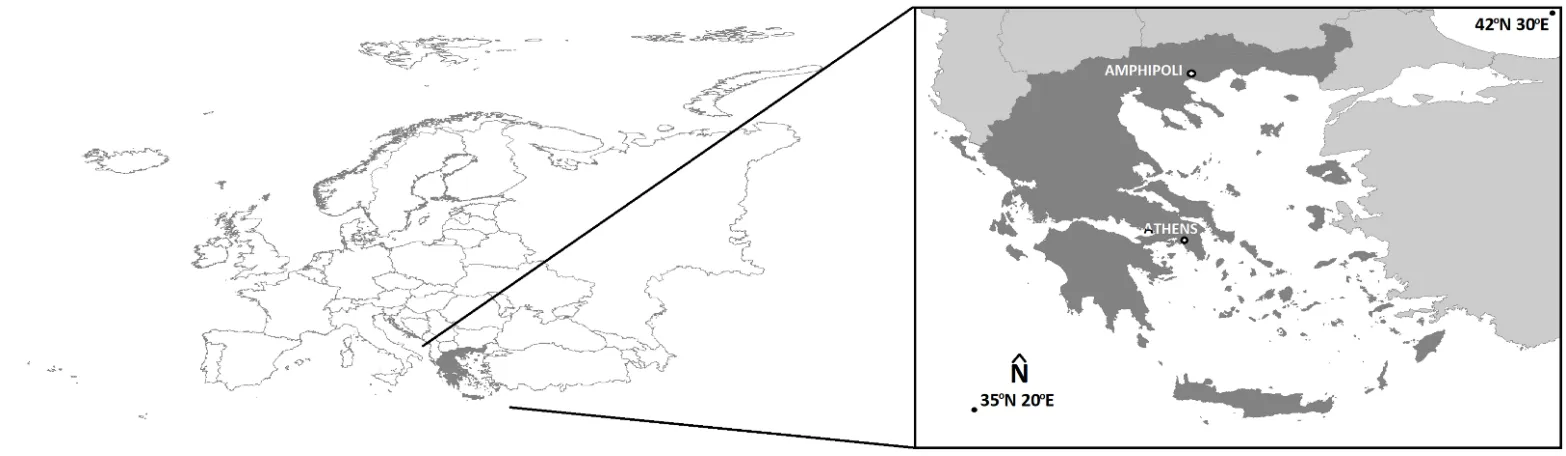
Precision Archaeology leverages advanced technologies, such as unmanned aircraft systems (UAS), for documenting archaeological sites with high spatial resolution and accuracy. This paper presents a reproducible RGB–multispectral (MS) image-fusion workflow for Precision Archaeology, combining PPK-based georeferencing with quantitative assessment of product accuracy and spectral preservation. Within this framework, the repeatability of the results produced by the UAS data fusion method confirms its reliability and establishes it as a valuable documentation tool. Among the experimental applications conducted to date, this paper adds two more: the Sanctuary of Eukleia at Aigai and the funerary ensemble in the Philippi plain, where Aerial Remote Sensing was performed using a UAS equipped with a Post-Processed Kinematic (PPK)–Global Navigation Satellite System (GNSS) receiver. A ground-based GNSS receiver was used to measure control points (CPs) and the base point used to correct the coordinates of the UAS image acquisition centers using the PPK method. For both archaeological sites, RGB and MS stereoscopic images were acquired from flight altitudes of 60 and 100 m, respectively, achieving an overall theoretical solution accuracy of under 2 cm. Digital surface models (DSMs) were generated with spatial resolutions of approximately 2 cm for the RGB and about 14 cm for the MS images, along with orthophotomosaics with spatial resolutions of roughly 1 cm for RGB and 7 cm for MS images. In the final stage, image fusion of the RGB and MS orthophotomosaics was applied, improving the spatial resolution of the MS orthophotomosaics from 7 cm to approximately 1 cm, while simultaneously preserving nearly all the original spectral information in the new fused images. Spectral preservation was quantified via band-wise correlation between the original MS and fused images (≈0.99 average for the Philippi dataset; ≈0.85 average for Aigai, likely influenced by a ~45 min RGB–MS acquisition gap and corresponding shadow/illumination differences). These new images can be used for classification purposes, enabling the identification of different materials and the detection of archaeological feature pathology with optimal spatial resolution and accuracy.

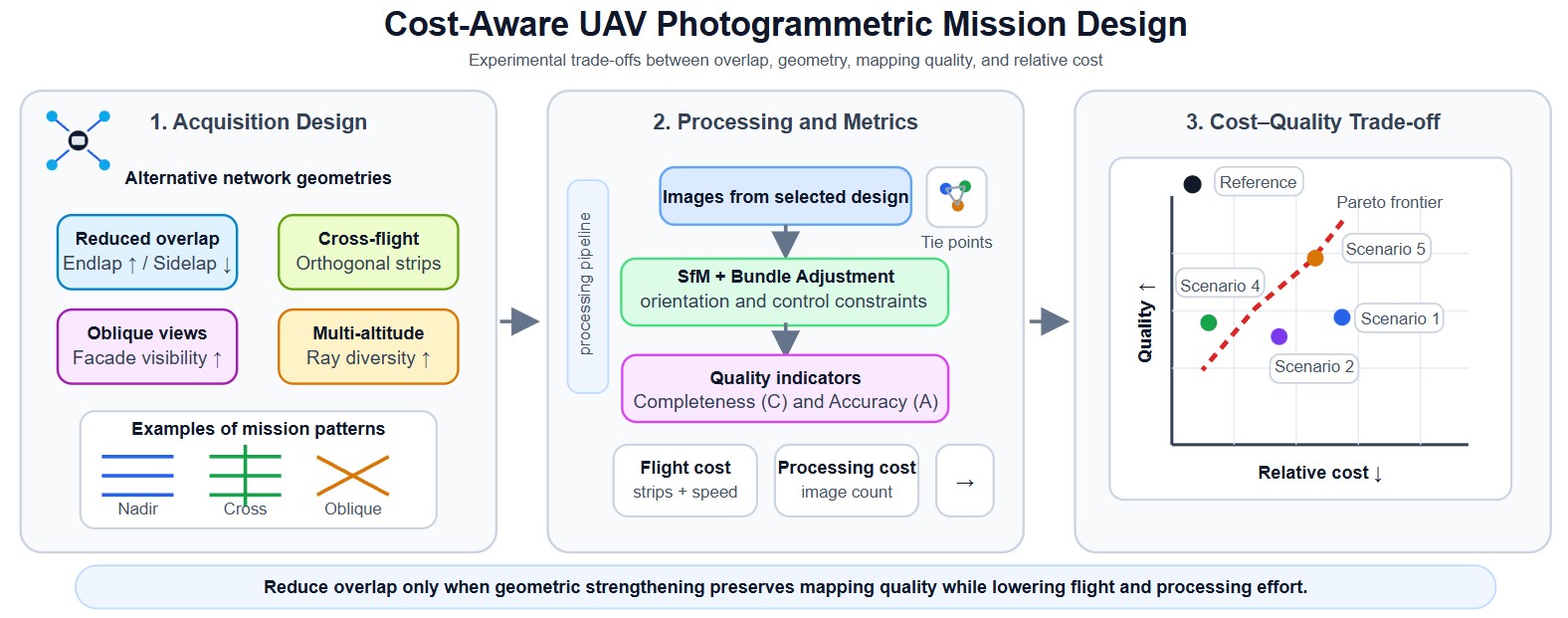
Unmanned Aerial Vehicle (UAV) photogrammetry enables high-resolution mapping and 3D reconstruction, yet operational and processing costs often scale rapidly with conservative mission designs (e.g., high overlap and redundant geometries). This paper presents an experimentally validated, cost-aware network-design study that quantifies cost–quality trade-offs in urban UAV photogrammetry. Five mission strategies—reduced sidelap with increased endlap, cross-flight compensation, partial high-overlap calibration, multi-altitude acquisition, and oblique cross-flight integration—are evaluated using a controlled experimental campaign over two urban test areas (2 × 20 ha), comprising 98 test blocks with overlaps ranging from 60% to 95%, sidelap from 20% to 80%, image counts from 70 to 2961, 7 check points, 15–17 ground control points, and GSD values between 2.6 cm and 4.6 cm, including nadir, oblique, cross-flight, and multi-altitude imagery. Each configuration is assessed using three indicators: (i) cost (flight and processing cost proxies), (ii) completeness, quantified by the number of reconstructed tie points, and (iii) accuracy, defined as a combined image–ground error at check points. Results show that cost reductions of over 50% in both flight and processing proxies can be achieved under the tested conditions while maintaining checkpoint accuracy comparable to a high-overlap reference configuration, provided that reduced overlap is compensated by stronger network geometry (e.g., cross-flight and/or oblique views). The analysis highlights product-dependent recommendations: vector map (MAP) generation can remain reliable even with very low sidelap (down to approximately 20%) when supported by adequate longitudinal overlap, whereas ortho-image mosaic (OIM) production requires at least moderate overlap in both directions (typically ≥60% endlap and sidelap) to ensure radiometric and geometric consistency. In contrast, dense 3D mesh reconstruction demands substantially stronger network geometry, including cross-flight and oblique imagery in addition to nadir views, with overlap levels exceeding 60% and preferably approaching 80%. These findings provide practical mission-planning guidelines that support efficient autonomous and semi-autonomous UAV mapping workflows.
Autonomous drones operating in indoor environments cannot rely on the global positioning system (GPS) signals for precise navigation due to severe signal attenuation and multipath interference in GPS-denied spaces. This paper presents a novel Li-Fi-based optical positioning, and combined with high-sensitivity photodiode sensor arrays, to enable robust drone guidance in challenging indoor environments where conventional radio-frequency localization fails. The proposed system uses strategically distributed ceiling-mounted Light Emitting Diode (LED) luminaires across the operational space, each transmitting unique identification codes through high-frequency light modulation at rates imperceptible to human vision, thereby maintaining dual functionality for simultaneous illumination and positioning. Unlike existing VLC positioning studies that focus on static receivers, our system integrates real-time optical localization directly into the UAV control loop at 120 Hz, achieving closed-loop autonomous navigation without GPS or RF assistance. The system demonstrates sub-decimetric positioning accuracy (<8 cm), low latency (4.2 ms), and operates successfully on resource constrained micro-UAV platforms (250 g quadcopter with STM32 microcontroller. OpenELAB Technology Ltd., Garching bei München, Germany). Experimental validation includes complex 3D trajectory tracking, multi-room scalability analysis, and quantitative comparison with existing localization technologies, confirming the viability of Li-Fi guided autonomous flight for practical indoor application.

Urban air quality reflects the combined effects of topography, built form, and emission sources, producing pronounced spatial and temporal variability in pollutant dispersion. This study investigates how urban morphological features-building density, green-space distribution, and transportation corridors-shape these dispersion patterns by deploying unmanned aerial vehicles (UAVs) equipped with Air Quality Index (AQI) sensors. Multi-altitude, high-resolution drone transects were conducted across contrasting urban settings to capture fine-scale pollutant distributions and their dynamics. The measurements reveal localized hotspots and zones of limited dispersion that align with variations in building layout, vegetation presence, and traffic intensity. Compared with fixed-site monitors, the UAV approach resolves vertical and horizontal gradients that are otherwise missed, providing complementary evidence of three-dimensional micro-scale heterogeneity. Taken together, the results indicate that decisions on urban design and infrastructure placement materially influence air-quality outcomes. These findings support the integration of UAV-based observations with conventional monitoring networks to inform targeted mitigation measures, exposure-aware mobility planning, and evidence-based strategies for public health and urban sustainability.

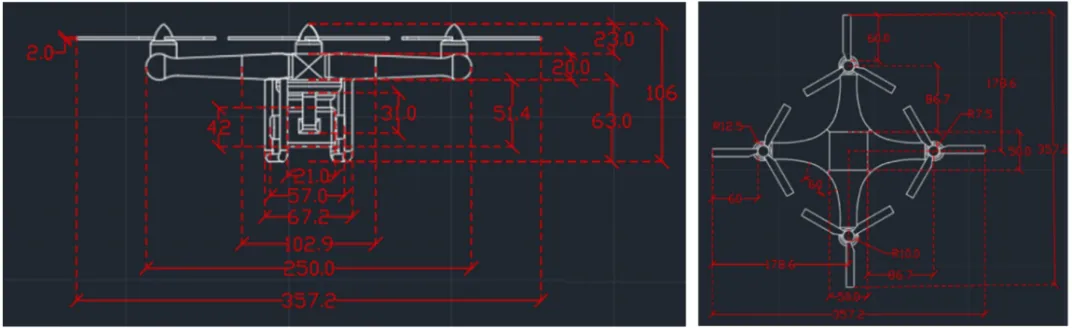
This article briefly presents the design steps, from the conceptual design up to flight simulation of the Euclid 3D printed small Unmanned Aerial Vehicle (sUAV). The use of valid tools and proper methodology implementation is essential throughout this entire path to render the aircraft’s kinematics properly in the flight simulator. The primary object of study in this article is the Euclid sUAV handling qualities evaluation through flight simulation, using Cooper-Harper Handing Qualities Rating Scale. A novel methodology consisting of eighteen flight tests is presented, each one evaluating a certain flight procedure. For each procedure, performing instructions are provided. This methodology can be used either as is, or modified, to evaluate the handling qualities of similar sUAV’s. Furthermore, a full video of the procedure is given for validation and replication purposes. The results from the application of the 18-step procedure for the Euclid sUAV, indicated that all scores fluctuated in the (1–3) score region. These score region is translated as satisfactory handling qualities, without improvement needed to the system, according to Cooper-Harper Handing Qualities Rating Scale.

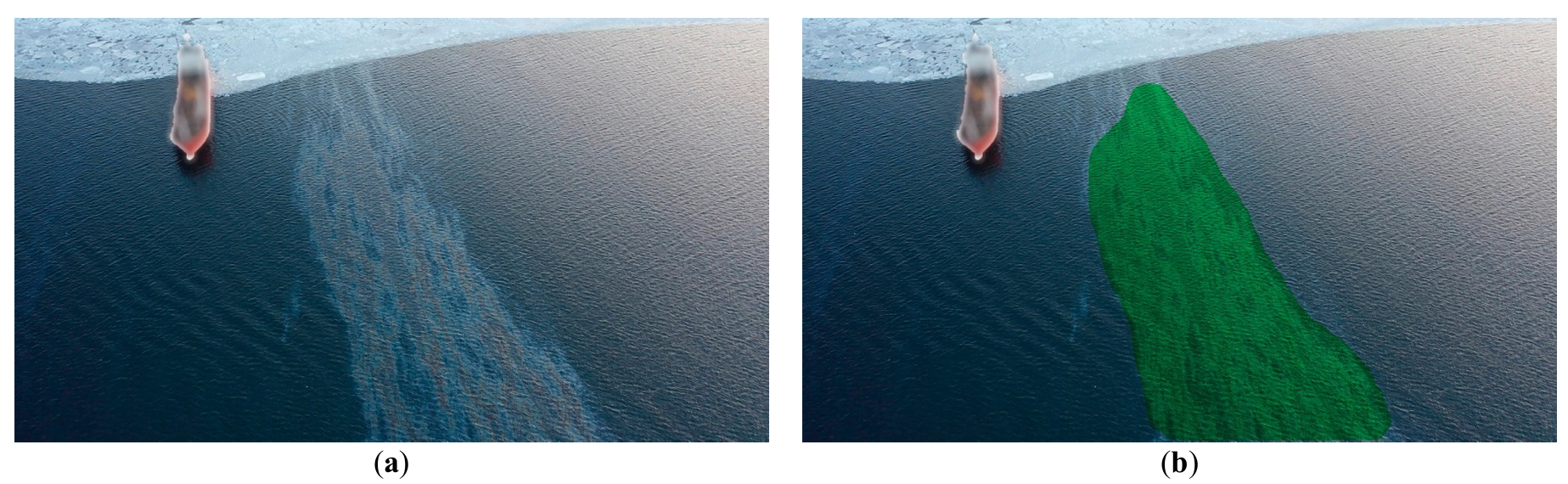
The objective of marine ecological safety necessitates the development of comprehensive, integrated strategies for oil spill management, encompassing advanced monitoring and effective remediation. This paper introduces and validates a novel integrated methodology and conceptual framework for autonomous marine environmental safety. The core of this framework lies in the merging of AI-assisted monitoring capabilities with a multi-agent Unmanned Aerial Vehicle (UAV) system for targeted dispersant delivery. UAV systems, within this methodology, function as a cost-effective and readily deployable operational platform. The study details the primary development stages of the methodology-driven system and presents empirical results from in-situ field trials. The framework leverages artificial intelligence (AI) tools developed and validated for slick monitoring, which execute primary segmentation for spill detection and subsequent secondary segmentation to categorize the slick into thickness uniformity maps. Datasets of actual marine oil slick imagery were compiled to facilitate robust deep learning of the underlying neural network architectures. The study explores scientific feasibility, specifically employing Laser-Induced Fluorescence (LIF) spectroscopy to classify oil product grades and assess the ecological impact of various remediation agents on local phytoplankton communities. This integrated method for spill response is underpinned by successful field validation results. The full methodology was tested during actual oil spill incidents in the waters of Peter the Great Bay from 2019 to 2024. The article presents experimental validation of a new concept and methodology of integrated environmental safety of marine areas by a multi-agent UAV system in the event of oil product spills.
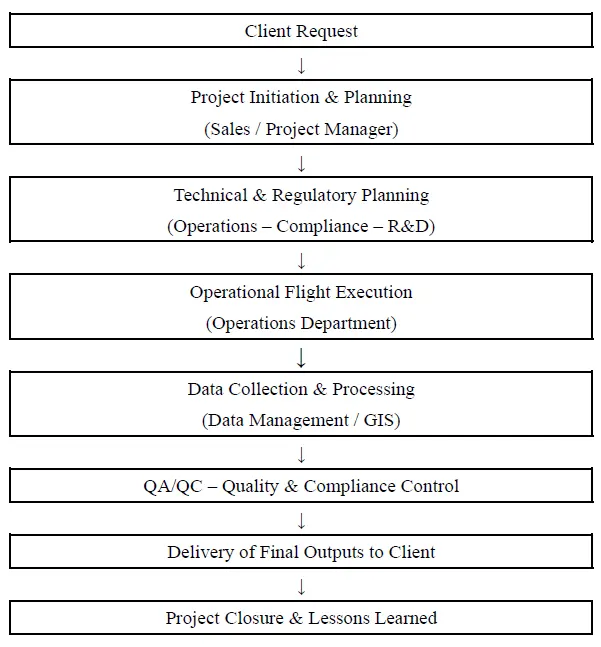
The rapid evolution of geoinformatics technologies, particularly through the adoption of Unmanned Aircraft Systems (UAS), has brought significant changes to the collection, processing, and analysis of spatial data. UAS are increasingly integrated into Geographic Information Systems (GIS), remote sensing, and spatial analysis, enhancing efficiency and accuracy in applications such as precision agriculture and infrastructure management. However, limited empirical research has examined the consequences of their integration for operational efficiency, regulatory compliance, and related management practices in the Greek context. This study evaluates how UAS integration into the operations of Greek geoinformatics firms enhances efficiency and supports compliance with Greek and European regulatory frameworks. A qualitative multi-case study methodology is employed across five Greek geoinformatics service providers, and data are collected through semi-structured interviews and secondary sources. Findings indicate that UAS integration improves the quality of spatial data, reduces data collection costs, and facilitates regulatory compliance of these firms. Finally, the study highlights the emergence of optimal operational management policies of UAS including standardized end-to-end workflows, clear role allocation and compliance responsibilities, systematic QA/QC procedures, proactive regulatory monitoring (PDRA/SORA readiness), which strengthen and promote innovative geoinformatics technologies.
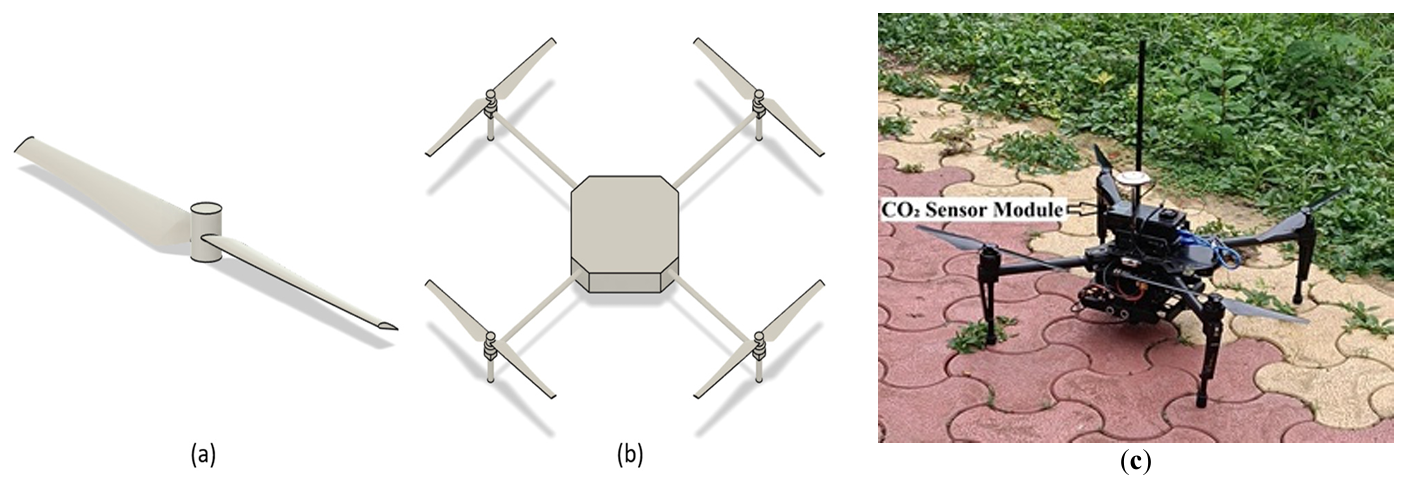
Recent advancements in unmanned aerial vehicle (UAV) technology have enabled flexible, high-resolution monitoring of atmospheric CO2, particularly in complex or otherwise inaccessible environments. This study employs Computational Fluid Dynamics (CFD) to investigate the downwash flow field of a quadcopter UAV in hover condition with the objective of identifying low-disturbance regions suitable for accurate atmospheric sensor placement. A quadcopter model was simulated using the SST k-ω turbulence model. Simulations were performed at rotor speeds ranging from 1000 to 6000 rpm. Results show that the strongest downwash and turbulence occur directly beneath the rotors, while airflow above the central fuselage and regions laterally distant from the rotors remain significantly calmer. The findings strongly recommend placing gas sensors either above the drone body or sufficiently far horizontally from the rotor plane to minimize measurement errors caused by propeller-induced flow.
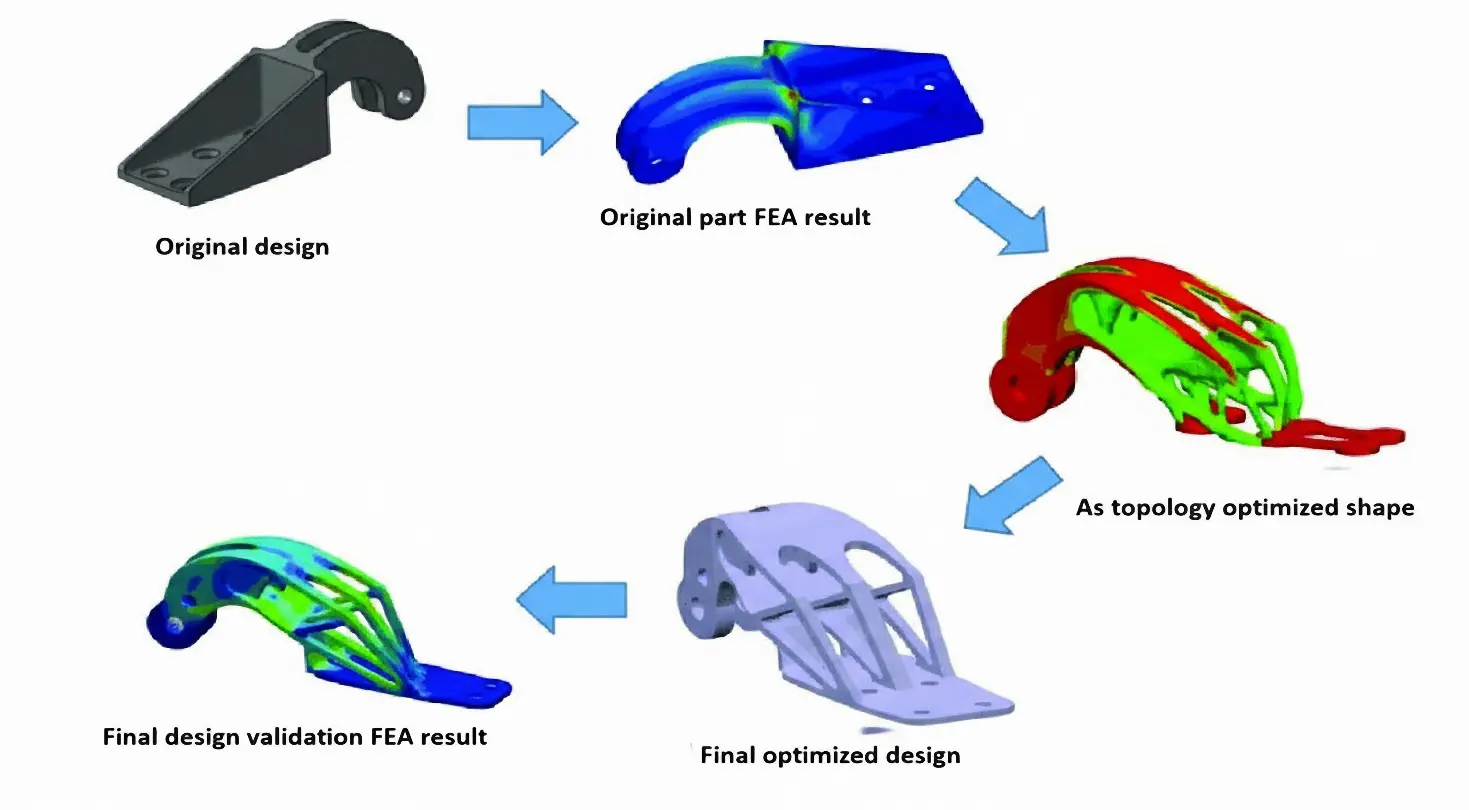
Payload drones are often limited more by frame weight than by motor power. This work aims to design, optimize, and validate a flat octocopter frame with eight independently driven rotors arranged symmetrically on separate arms. The drone frame design in SOLIDWORKS uses Finite Element Analysis (FEA) and topology optimization to remove material from low-stress regions while keeping the main load paths intact. The final design cuts the frame mass by 37.3% compared to the baseline model and reduces the 3D printing time by about five hours using a Creality K1C printer with Polylactic Acid (PLA) filament. These changes increase the available thrust-to-weight margin for payload without exceeding the allowable stress or deformation limits of the material. The electronic components also identified compatible flight controllers, ESCs, motors, and radio systems to show that the proposed frame can be integrated into a complete multirotor platform. Overall, this work demonstrates a practical approach to designing lighter octocopter frames that are easier to 3D print and can be used more effectively for delivery and inspection missions.
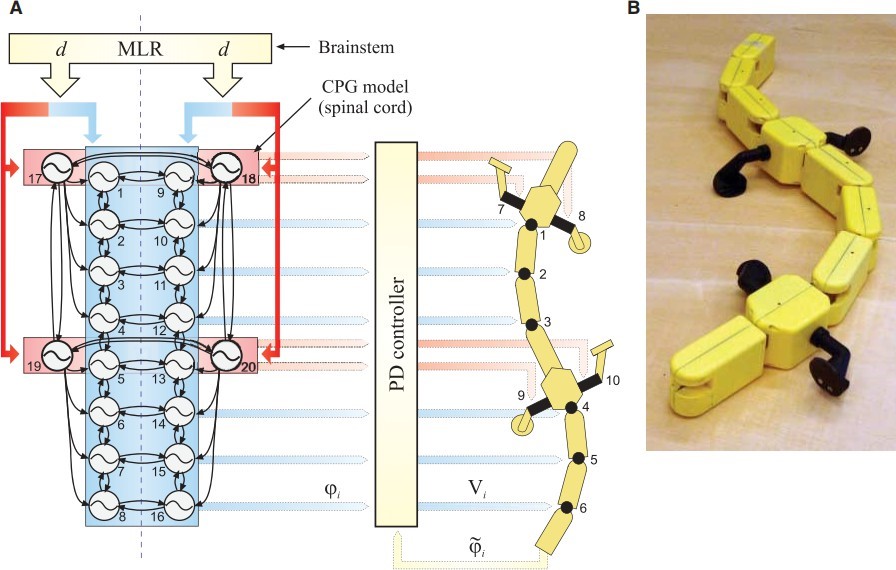
Soft robotics has emerged as a promising direction for enabling safe, adaptive, and energy-efficient interactions with unstructured environments due to its inherent compliance. Recently, Deep Reinforcement Learning (DRL) has become a powerful tool for autonomous behavior generation in soft robots, surpassing limitations of classical model-based control. However, despite rapid growth of publications in this domain, there is still a lack of systematic comparative surveys that clarify how different DRL approaches have been used for soft mobile robots, what types of tasks they address, and what performance evaluation criteria have been used. In this article, we review and classify existing works in DRL-enabled soft robotics, focusing particularly on soft mobile systems, and present a structured synthesis of contributions, algorithms, training strategies, and real-world applications. Unlike previous reviews that discuss soft robotics or DRL separately, this paper explicitly provides cross-comparison across DRL paradigms and soft robot tasks, enabling researchers to identify suitable DRL approaches for different soft mobile robotic behaviors. Finally, major challenges and promising future directions are proposed to advance this interdisciplinary research area.
Unmanned Aerial Vehicles (UAVs) equipped with RGB cameras are increasingly used as low-cost tools for crop monitoring, offering a range of vegetation indexes in the visible spectral range. These indexes have often been reported to correlate with other multispectral indexes such as the Normalized Difference Vegetation Index (NDVI) during active growth stages. However, still efforts should be done about their performance under conditions of canopy degradation. In this study, UAV flights were conducted over a cereal field immediately after harvest, when the canopy consisted mostly of bare soil and dry residues. RGB-based indexes were calculated from the orthomosaic, normalized to a [0–1] scale, and compared to NDVI derived from a multispectral sensor. Data preprocessing included ground control point (GCP) georeferencing, removal of NoData pixels, and raster alignment. Results revealed very weak correlations between RGB indexes and NDVI (Pearson r < 0.15), with Visible Atmospherically Resistant Index (VARI) showing almost no variability across the field. Although the Leaf Index (GLI), yielded the lowest error values, all RGB indexes failed to reproduce the variability of NDVI under post-harvest conditions. These findings highlight a critical methodological limitation: RGB indexes are unsuitable for vegetation monitoring when canopy cover is severely reduced. While they remain useful during active growth, their reliability diminishes in degraded or post-harvest scenarios, thereby limiting their application in assessing abiotic stress in cereals.

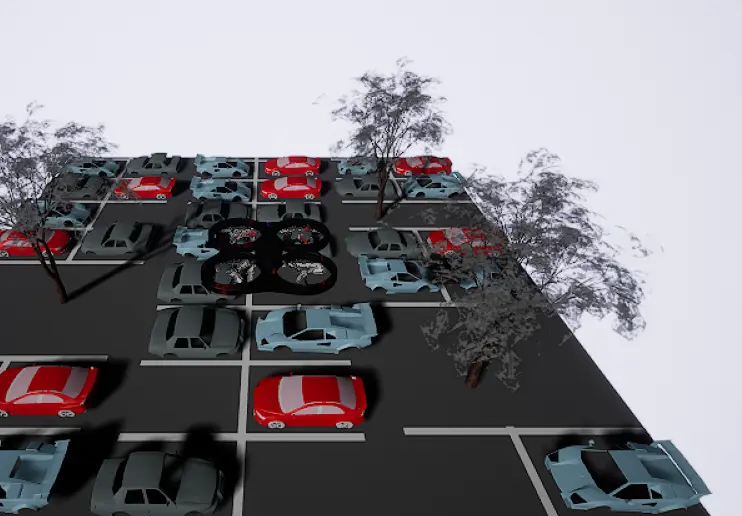
Unmanned aerial vehicles (UAVs) have increased in popularity for several diverse applications over the past few years. Parking, especially in crowded parking lots, can be very time-consuming, as a driver must manually search for vacant spaces among many occupied ones. In this work, reinforcement learning—a category of machine learning in which an agent receives inputs from the environment while outputting actions in order to maximize reward—was utilized in tandem with AirSim, a drone simulator developed by Microsoft, to automate a virtual UAV’s movement. A convolutional neural network (CNN) was then utilized to detect both vacant and filled parking spots, which achieved 98% recall and 93% accuracy. Unreal Engine was used to create a custom environment that resembled a parking lot, and the virtual drone was trained using a Deep Q-Network (DQN). The DQN achieved a mean reward of 394.5 in training and 460.4 in evaluation. A pre-trained CNN integrated with the DQN enables the real-time classification of vacant/occupied parking spaces from drone imagery. Results validate the effectiveness of combining reinforcement learning navigation with CNN image classification, demonstrating deployment-ready performance for real-world congested parking applications.
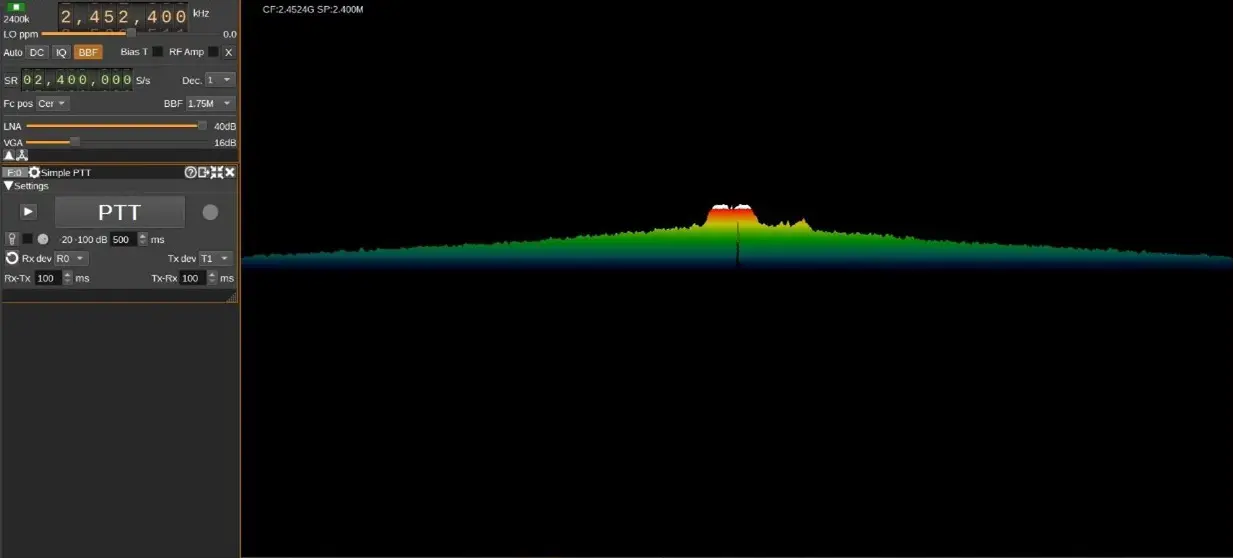
The increasing use of wireless technologies in many aspects of people’s lives has led to a congested electromagnetic spectrum, making it critical to manage the limited available spectrum as efficiently as possible. This is particularly important for military activities such as electronic warfare, where jamming is used to disrupt enemy communication, self-attacking drones, and surveillance drones. However, current detection methods used by armed personnel, such as optical sensors and Radio Detection and Ranging (RADAR), do not include Radio Frequency (RF) analysis, which is crucial for identifying the signals used to operate drones. To combat security vulnerabilities posed by the rogue or unidentified transmitters, RF transmitters should be detected not only by the available data content of broadcasts but also by the physical properties of the transmitters. This requires faster fingerprinting and identifying procedures that extend beyond the traditional hand-engineered methods. In this paper, RF data from the drones’ remote controller is identified and collected using Software Defined Radio (SDR), a radio that employs software to perform signal-processing tasks that were previously accomplished by hardware. A deep learning model is then provided to train and detect modulation strategies utilized in drone communication and a suitable jamming strategy. This paper overviews Unmanned Aerial Vehicles (UAV) neutralization, communication signals, and Deep Learning (DL) applications. It introduces an intelligent system for modulation detection and drone jamming using Software Defined Radio (SDR). DL approaches in these areas, alongside advancements in UAV neutralization techniques, present promising research opportunities. The primary objective is to integrate recent research themes in UAV neutralization, communication signals, and Machine Learning (ML) and DL applications, delivering a more efficient and effective solution for identifying and neutralizing drones. The proposed intelligent system for modulation detection and jamming of drones based on SDR, along with deep learning approaches, holds great potential for future research in this field.
This study evaluates the Interacting Multiple Model Adaptive Robust Kalman Filter (IMM-ARKF) for accurate position estimation in a leader-follower swarm of nine drones, consisting of one leader and eight followers following distinct trajectories. The evaluation is conducted under hybrid noise conditions combining Gaussian and Student’s t-distributions at 10%, 30%, and 50% ratios. The IMM-ARKF, which relies solely on its adaptive robust filtering mechanism, is compared with standard Interacting Multiple Model Kalman Filter (IMM-KF) and Extended Kalman Filter (IMM-EKF) methods. Simulations show that IMM-ARKF provides better accuracy, reducing root mean square error (RMSE) by up to 43.9% compared to IMM-EKF and 34.9% compared to IMM-KF across different noise conditions, due to its ability to adapt to hybrid noise. However, this improved performance comes with a computational cost, increasing processing time by up to 148% compared to IMM-EKF and 92.1% compared to IMM-KF, reflecting the complexity of its adaptive approach. These results demonstrate the effectiveness of IMM-ARKF in enhancing navigation accuracy and robustness for multi-drone systems in challenging environments.
This study focuses on designing and testing a formation guidance system for a UCAV as a wingman to an F-16 fighter jet. A critical assessment of the UCAV autopilot revealed areas for improvement, which were addressed to refine the stable foundation of the autopilot for implementing the guidance system. This system uses PID controllers to minimise the along-track, cross-track, and vertical-track errors during standard manoeuvres. The system performed exceptionally well in the vertical (z) direction but showed robustness challenges in the along-track (x) and cross-track (y) directions under wind disturbances. A notable outcome was the identification of a novel mathematical relationship between the along-track offset command and its gains, offering a pathway for advanced formation systems. These findings pave the way for future enhancements in diverse formation operations.
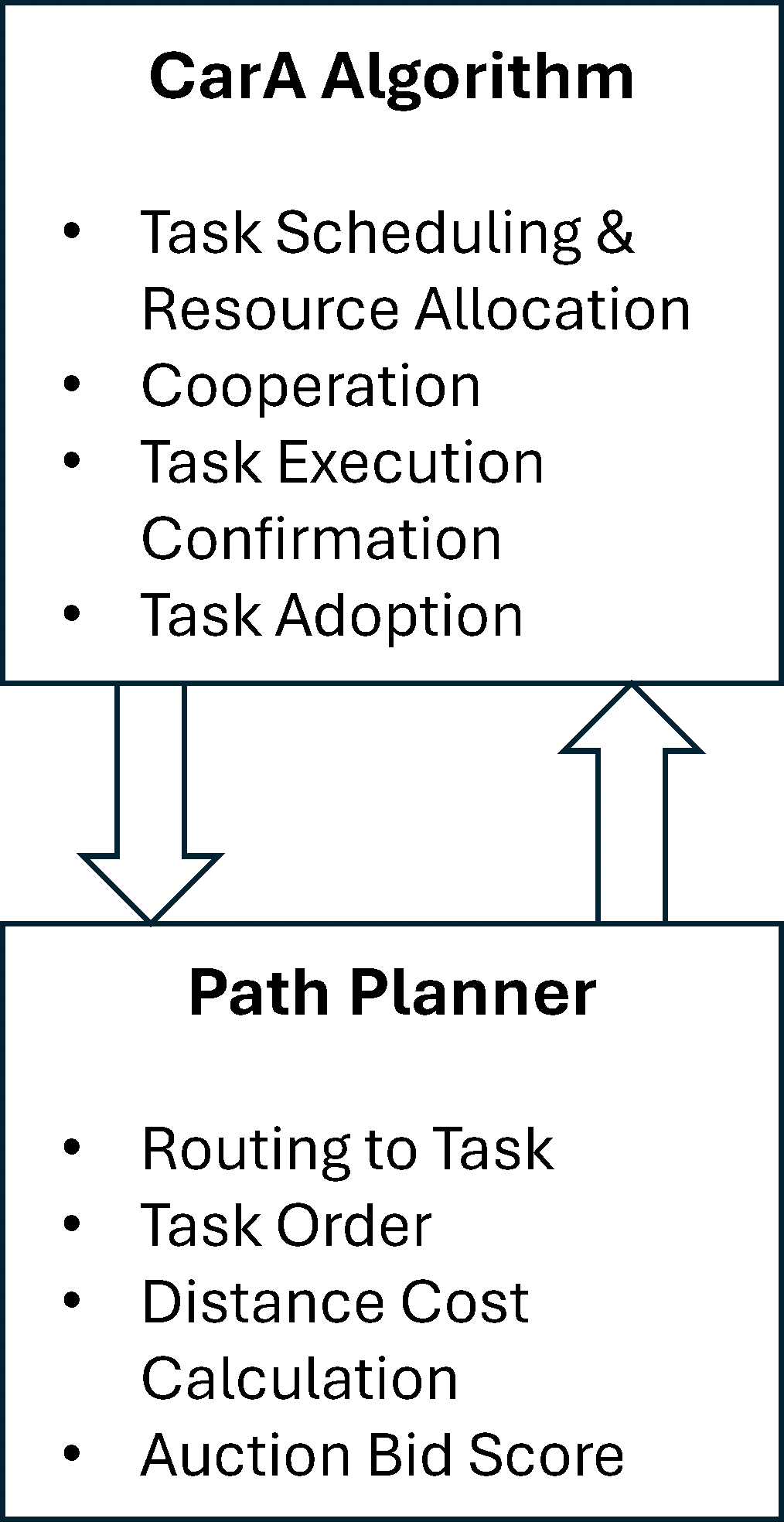
Unmanned aerial vehicle (UAV) systems can fail during civil and military operations. This presents a significant challenge for human teleoperators (remote pilots) in determining task reallocation after member loss within the fleet. To alleviate the high cognitive load on teleoperators in critical situations, a decentralized strategy was developed to resolve the combined task assignment and vehicle routing problems. This Integrated Consensus Framework (ICF) not only solves the combined problem but also adds a unique ability to identify the loss of a vehicle and dynamically reroute agents to abandoned tasks to achieve a satisfactory solution. ICF is a two-tiered approach that combines a novel algorithm, the Caravan Auction (CarA) algorithm, with a path-planning strategy to identify when UAVs are lost and reallocate orphaned tasks. The CarA Algorithm consists of three phases: auction, consensus, and validation phases. An experiment using Monte Carlo simulations was conducted to determine the performance of ICF. Teleoperators assigned to complete multiple tasks with UAVs in dangerous environments can allow the proposed system to perform task assignments and reallocation while offering only supervisory control as needed. The results indicate this novel approach provides comparable performance to existing strategies, doing so with the addition of randomized UAV loss.
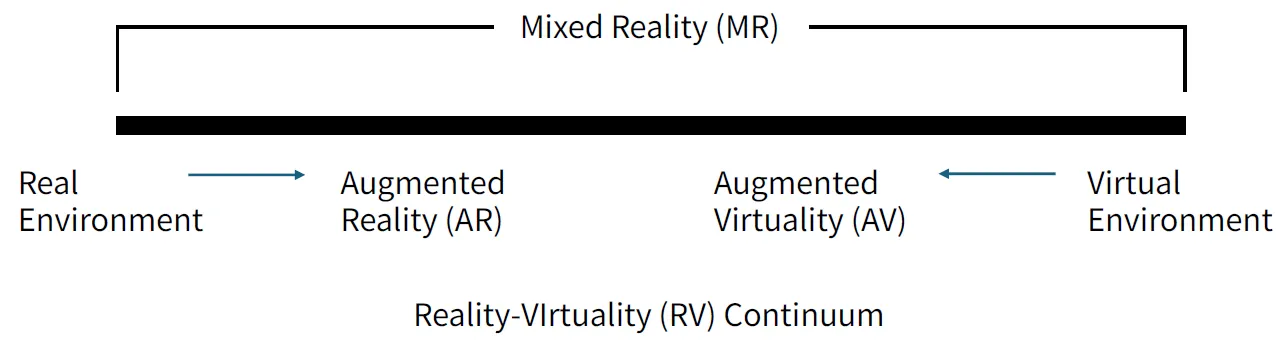
This paper presents a comprehensive survey of Extended Reality (XR)-based drone simulation systems, encompassing their architectures, simulation engines, physics modeling, and diverse training applications. With a particular focus on manual multirotor drone operations, this study highlights how Virtual Reality (VR) and Augmented Reality (AR) are increasingly vital for pilot training and mission rehearsal. We classify these simulators based on their hardware interfaces, spatial computing capabilities, and the integration of game and physics engines. We analyze specific platforms such as Flightmare, AirSim, DroneSim, Inzpire Mixed Reality UAV Simulator, and SimFlight XR are analyzed to illustrate various design strategies, ranging from research-grade modular frameworks to commercial training tools. In this paper, we also examine the implementation of spatial mapping and weather modeling to enhance realism in AR-based simulators. Finally, we identify critical challengesthat remain to be addressed, including user immersion, regulatory alignment, and achieving high levels of physical realism, and propose future directions in which XR-integrated drone training systems can advance.
The quadrotor is an underactuated, nonlinear system that presents significant challenges in both modeling and control design. This work develops a decoupled control framework based on the translational (Newtonian) and rotational (Eulerian) dynamics of the quadrotor. A Linear Quadratic Gaussian (LQG) regulator is implemented for control, with two extended Kalman filters employed for state estimation in the respective dynamic subsystems. The full design process, from dynamic modeling to flight simulation presented in detail. Key elements include nonlinear simulation, model linearization, state-space representation, feedforward compensation, Linear Quadratic Regulator (LQR) gain tuning, actuator dynamics, sensor noise, LQG design, and extended Kalman filter. The limitations of applying linear control to a nonlinear system are also presented.

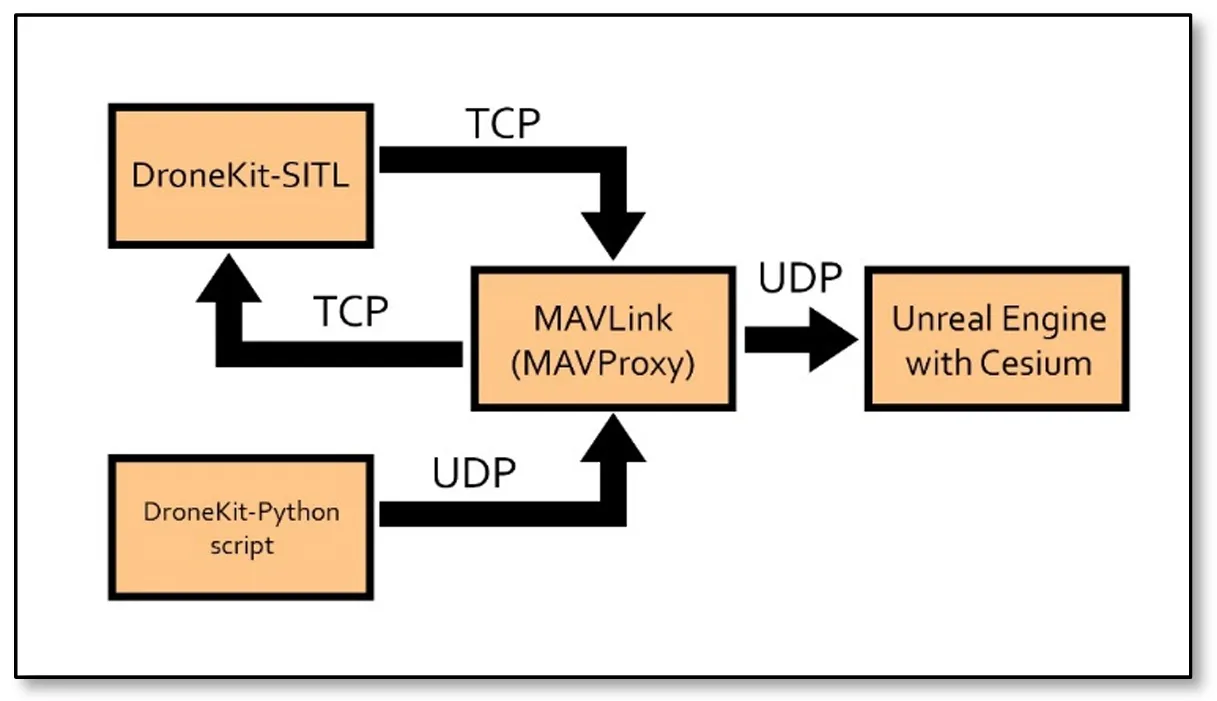
Drone simulation refers to the emulation of Unmanned Aerial Vehicles (UAVs) in a virtual environment, replicating real-world conditions to study and test the behavior, performance, and functionalities of drones. This paper explores the simulation of UAVs in the Unreal Engine environment using MAVProxy (Micro Air Vehicle Proxy) and the Python library DroneKit. By leveraging the computational capabilities of computers, this approach enables precise visualization and control of UAV flight dynamics in three dimensions. The use of Blueprints in Unreal Engine facilitates a cost-effective and accessible simulation process, allowing engineers and scientists to refine their UAV designs before real-world deployment. Results show the applicability of this approach vs. different environments, where an alternative approach also emerges as a viable option for visualizing textured buildings. This approach shows the power of open-source collaboration in advancing innovative solutions in the dynamic field of science and technology.
Drones, or unmanned aerial vehicles (UAVs), are increasingly utilized across diverse fields such as agriculture, environmental analysis, and engineering due to their ability to capture high-quality multispectral imagery. To ensure the accuracy of these images, radiometric calibration of onboard multispectral cameras is essential. This study aimed to develop and calibrate a low-cost Lambertian surface using barium sulfate (BaSO4) for radiometric calibration of UAV-mounted multispectral cameras. A stainless steel mold was designed to compact BaSO4, and the resulting surface was calibrated using an ASD FieldSpec HandHeld UV/NIR spectroradiometer and a Spectralon plate as the reference standard. Results showed a strong correlation (Pearson’s r = 0.9988) between the BaSO4 surface and the Spectralon plate, confirming that the BaSO4-based surface is a cost-effective alternative for producing diffuse Lambertian surfaces with performance comparable to the standard.
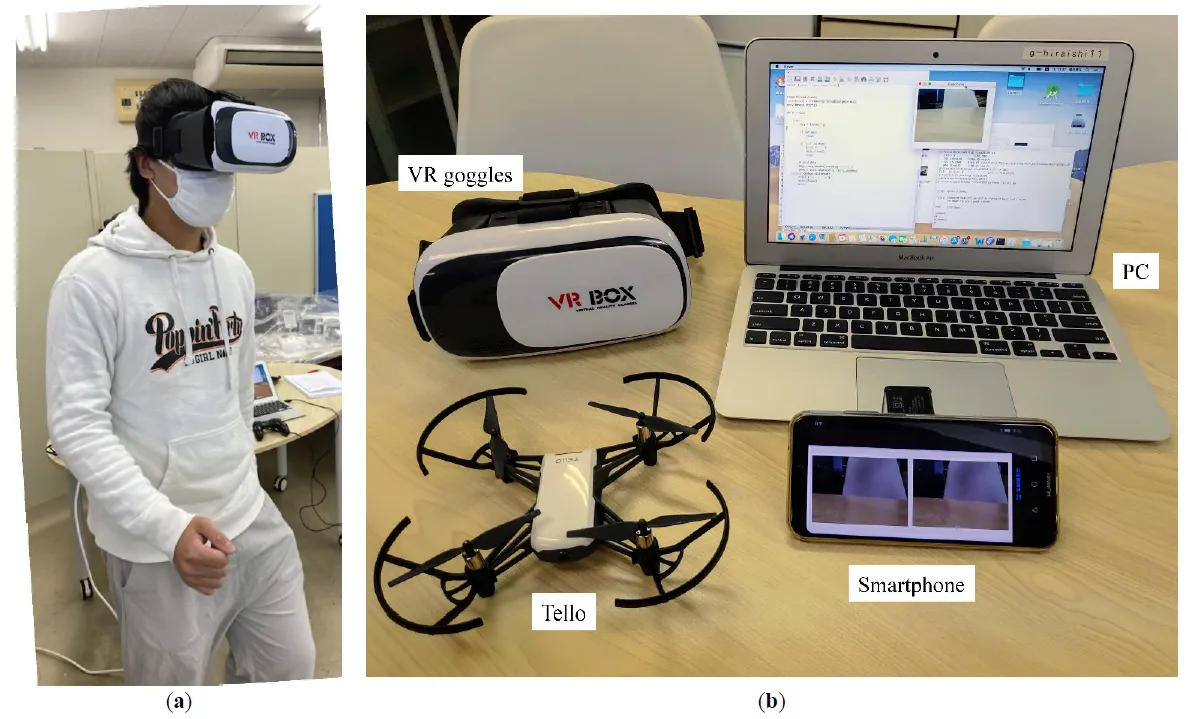
This study proposes a method for operating drones using natural human movements. The operator simply wears virtual reality (VR) goggles. An image from the drone camera was displayed on the goggles. When the operator changes the direction of his or her face, the drone changes the direction to match that of the operator. When the operator moves their head up or down, the drone rises or falls accordingly. When the operator walks in place, rather than walking, the drone moves forward. This allows the operator to control the drone as if they were walking in the air. Each of these movements was detected by the values of the acceleration and magnetic field sensors of the smartphone mounted on the VR goggles. A machine learning method was adopted to distinguish between walking and non-walking movements. Compared with operation via conventional remote control, it was observed that the remote controller performed better than the proposed approach in the early stages. However, when the participants familiarized themselves with the natural operation, these differences became relatively small. This study combined drones, VR, and machine learning. VR provides drone pilots with a sense of realism and immersion, whereas machine learning enables the use of natural movements.
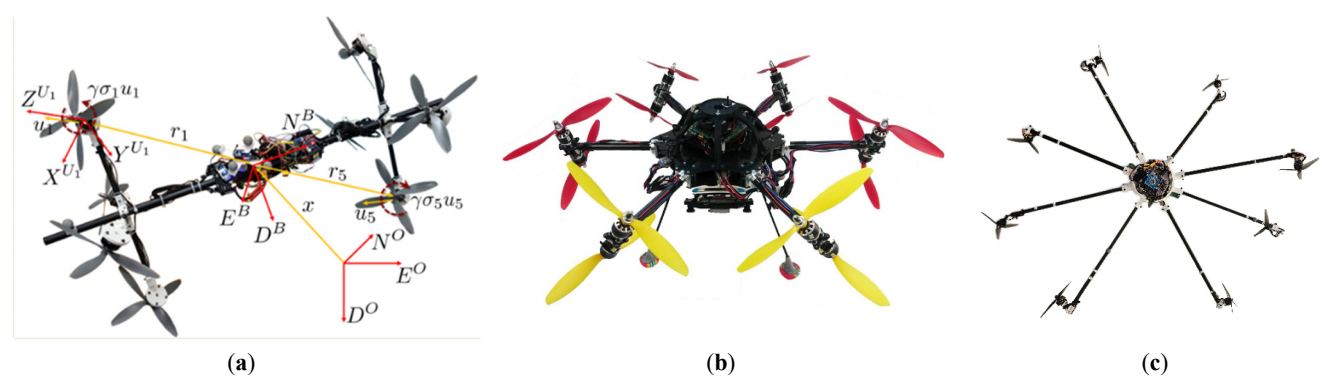
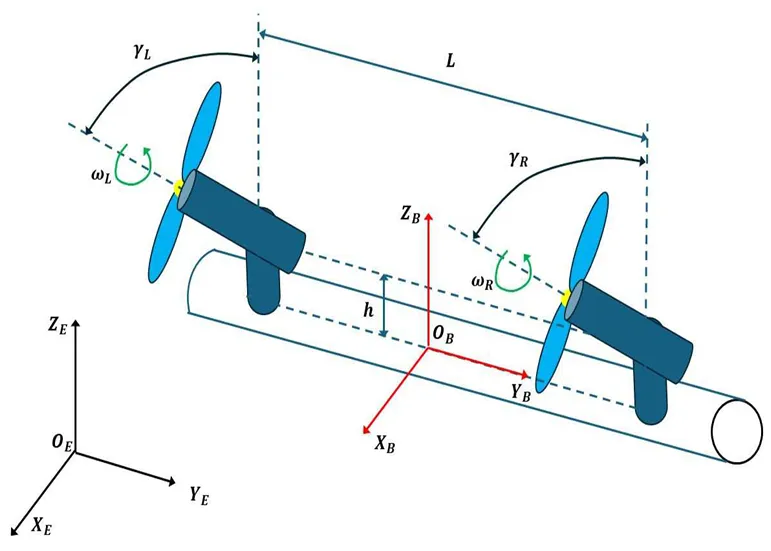
Bicopter UAVs can find use in several civilian and defence applications. In the present article a solution of the nonlinear optimal control problem of 6-DOF bicopters is first attempted using a novel nonlinear optimal control method. This method is characterized by computational simplicity, clear implementation stages and proven global stability properties. At a first stage, approximate linearization is performed on the dynamic model of the 6-DOF bicopter with the use of first-order Taylor series expansion and through the computation of the system’s Jacobian matrices. This linearization process is carried out at each sampling instance, around a temporary operating point. At a second stage, an H-infinity stabilizing controller is designed for the approximately linearized model of the 6-DOF bicopter. To find the feedback gains of the controller an algebraic Riccati equation is repetitively solved, at each time-step of the control method. Lyapunov stability analysis is used to prove the global stability properties of the control scheme. Next, the article examines a multi-loop flatness-based control method for the dynamic model of the 6-DOF bicopter. The drone’s dynamics is written in the form of two chained subsystems which are shown to be differentially flat. The state vector of the second subsystem becomes virtual control input to the first subsystem, while the control inputs of the first subsystem become setpoints for the second subsystem. Local controllers for the individual subsystems invert their dynamics. The global stability properties of the multi-loop flatness-based control scheme are also proven though Lyapunov analysis.
With the growing use of Real Time Kinematics (RTK) Unmanned Aerial Vehicles (UAVs) and advancements in ground control points (GCPs), assessing positional accuracy of UAV derived orthophoto mosaics is crucial. This study aimed to improve UAV aerial image accuracy for more reliable orthophoto mosaics by examining the positional accuracy of orthophoto mosaics derived with (1) an RTK UAV; and (2) an RTK UAV combined with AeroPoints 2 GCPs. We tested two GPS base station methods for the RTK UAV: self-determined and manually assigned coordinates. The manually assigned coordinates resulted in significantly lower root mean square error (RMSE = 0.0729 m) compared to the self-determined method (RMSE = 1.9762 m), indicating improved accuracy. For the AeroPoints 2 GCPs, we recorded coordinates from a central GCP at a known location and four additional GCPs placed in each cardinal direction. The AeroPoints 2 system showed lower RMSE at all points compared to the RTK, with the central GCP at 0.0136 m, indicating high accuracy. These findings suggest that while RTK UAVs improve accuracy with manual base station assignment, incorporating AeroPoints 2 GCPs provides consistently higher precision across multiple locations. The study highlights the potential of AeroPoints 2 GCPs and suggests further research opportunities to enhance RTK UAV accuracy in areas lacking GPS correctional networks.
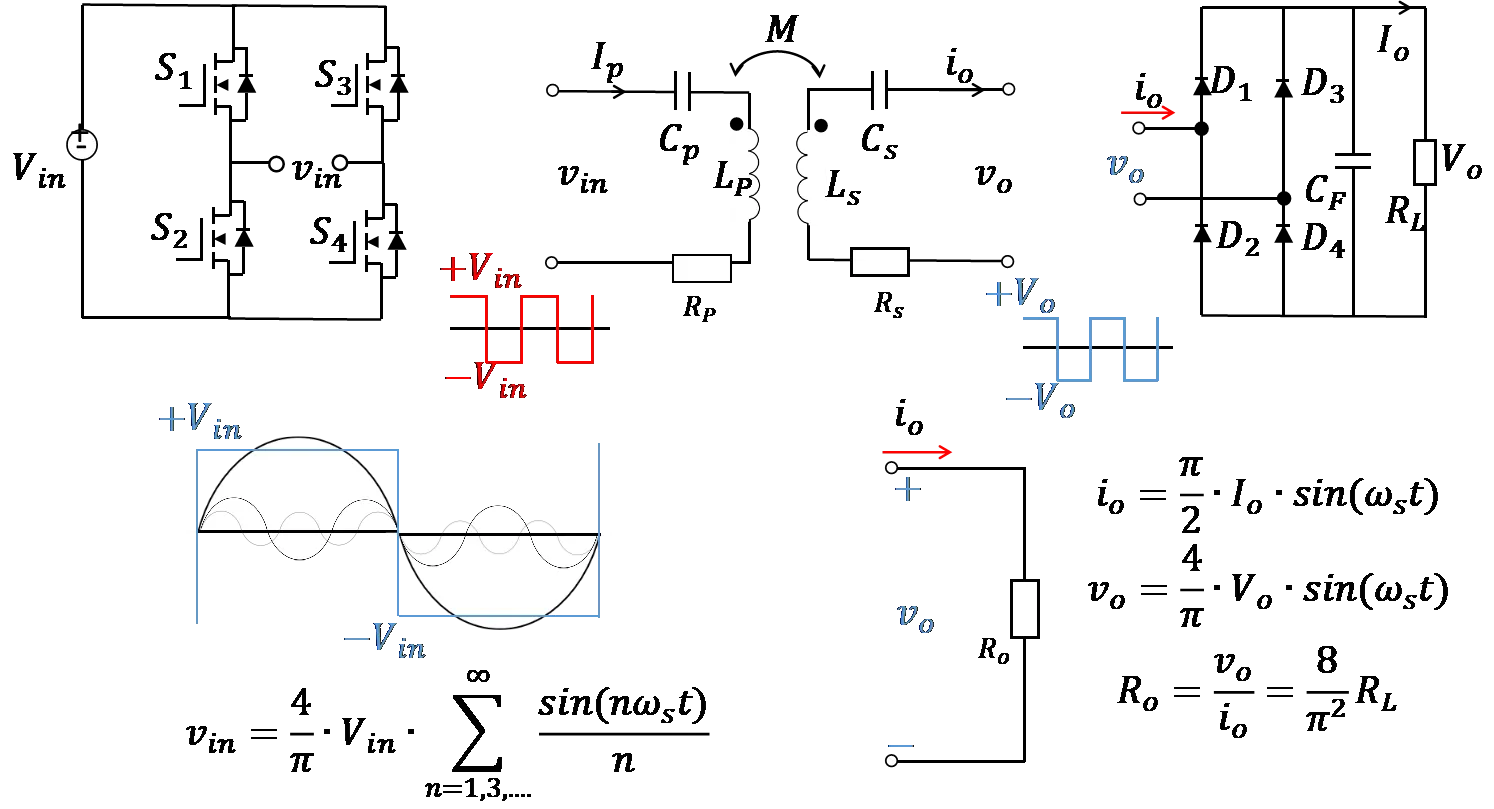
To address the limited endurance of unmanned aerial vehicles (UAVs) and the efficiency degradation and instability in traditional wireless charging systems, this study proposes a high-efficiency UAV wireless charging system based on the parity-time (PT) symmetric principle. A non-Hermitian coupled resonator model is established, incorporating a dynamic gain-loss balancing mechanism and real-time parameter feedback control to adaptively compensate for coupling coefficient fluctuations caused by UAV positional deviations, thereby maintaining PT-symmetric phase stability. The receiver coil adopts a planar air-core spiral structure and is integrated beneath the UAV landing gear to minimize interference with aircraft operations. Experimental results show a transmission efficiency of 90.2% at 65 W output power, with both power and efficiency remaining stable in the strong coupling region. The system demonstrates strong robustness against horizontal misalignment and eliminates the need for complex relay structures or high-precision alignment. This work not only provides a theoretical foundation for the application of PT-symmetry in wireless power transfer but also offers a novel technical pathway for enhancing UAV endurance.
The detection of drones in complex and dynamic environments poses significant challenges due to their small size and background clutter. This study aims to address these challenges by developing a motion-based pipeline that integrates background subtraction and deep learning-based classification to detect drones in video sequences. Two background subtraction methods, Mixture of Gaussians 2 (MOG2) and Visual Background Extractor (ViBe), are assessed to isolate potential drone regions in highly complex and dynamic backgrounds. These regions are then classified using the ResNet18 architecture. The Drone-vs-Bird dataset is utilized to test the algorithm, focusing on distinguishing drones from other dynamic objects such as birds, trees, and clouds. By leveraging motion-based information, the method enhances the drone detection process by reducing computational demands. Results show that ViBe achieves a recall of 0.956 and a precision of 0.078, while MOG2 achieves a recall of 0.857 and a precision of 0.034, highlighting the comparative advantages of ViBe in detecting small drones in challenging scenarios. These findings demonstrate the robustness of the proposed pipeline and its potential contribution to enhancing surveillance and security measures.

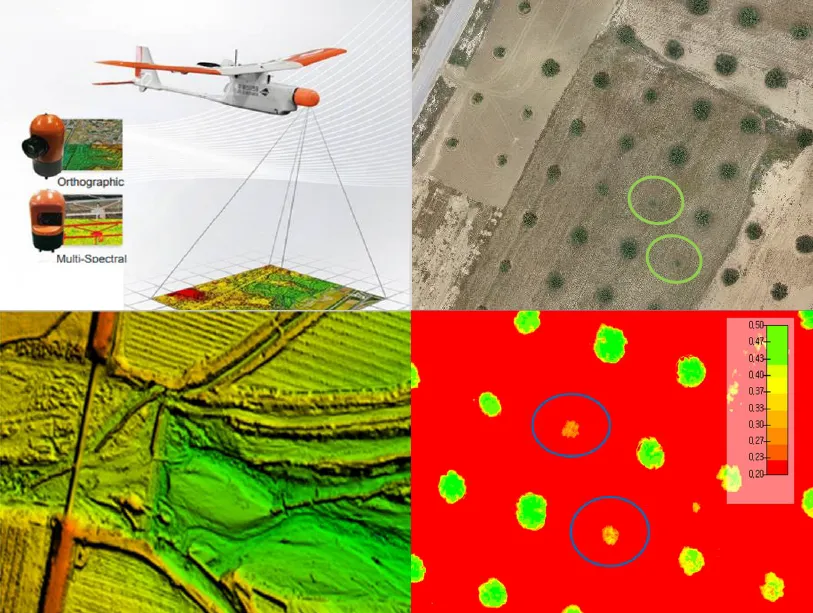
The integration of drone technology in precision agriculture offers promising solutions for enhancing crop monitoring, optimizing resource management, and improving sustainability. This study investigates the application of UAV-based remote sensing in Sidi Bouzid, Tunisia, focusing on olive tree cultivation in a semi-arid environment. REMO-M professional drones equipped with RGB and multispectral sensors were deployed to collect high-resolution imagery, enabling advanced geospatial analysis. A comprehensive methodology was implemented, including precise flight planning, image processing, GIS-based mapping, and NDVI assessments to evaluate vegetation health. The results demonstrate the significant contribution of UAV imagery in generating accurate land use classifications, detecting plant health variations, and optimizing water resource distribution. NDVI analysis revealed clear distinctions in vegetation vigor, highlighting areas affected by water stress and nutrient deficiencies. Compared to traditional monitoring methods, drone-based assessments provided high spatial resolution and real-time data, facilitating early detection of agronomic issues. These findings underscore the pivotal role of UAV technology in advancing precision agriculture, particularly in semi-arid regions where climate variability poses challenges to sustainable farming. The study provides a replicable framework for integrating drone-based monitoring into agricultural decision-making, offering strategies to improve productivity, water efficiency, and environmental resilience. The research contributes to the growing body of knowledge on agricultural technology adoption in Tunisia and similar contexts, supporting data-driven approaches to climate-smart agriculture.
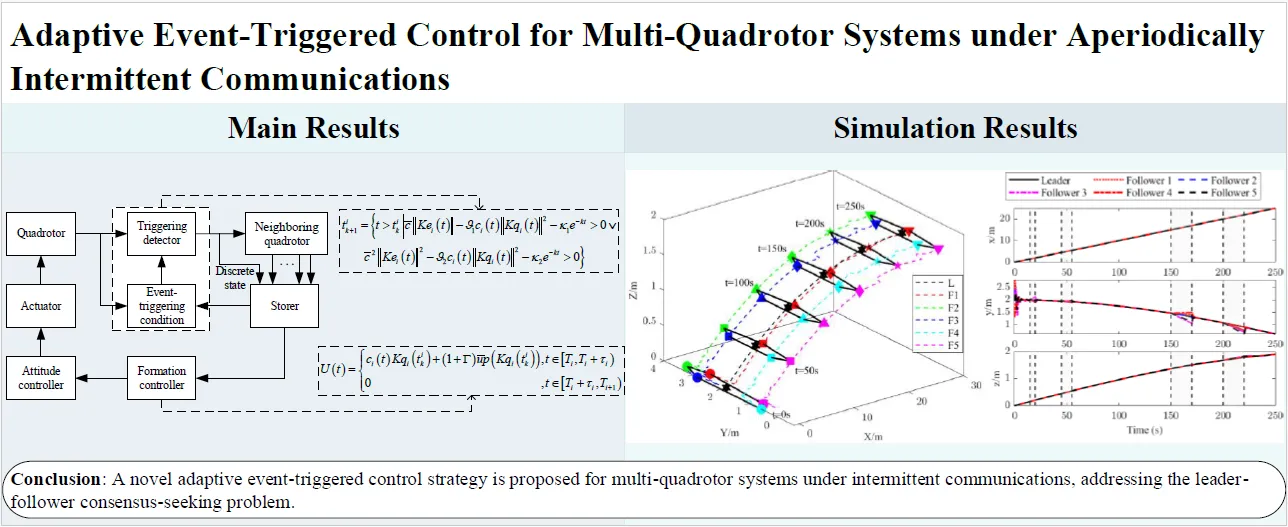
A novel adaptive event-triggered control strategy is proposed for multi-quadrotor systems under intermittent communications, addressing the leader-follower consensus-seeking problem where the leader has an unknown bounded input. Firstly, an activation time ratio condition is proposed, eliminating the reliance on the maximum time interval of intermittent communication. Secondly, a compensation term related to the leader’s unknown bounded input is designed in the controller to compensate for the error caused by intermittent communication in each period. Meanwhile, a prediction method is developed to eliminate the dependence on continuous information of neighboring quadrotors. Zeno behavior is strictly excluded, and communication among quadrotors is efficiently reduced with the designed event-triggering condition. Finally, numerical simulations verify the effectiveness and superiority of the proposed control strategy.
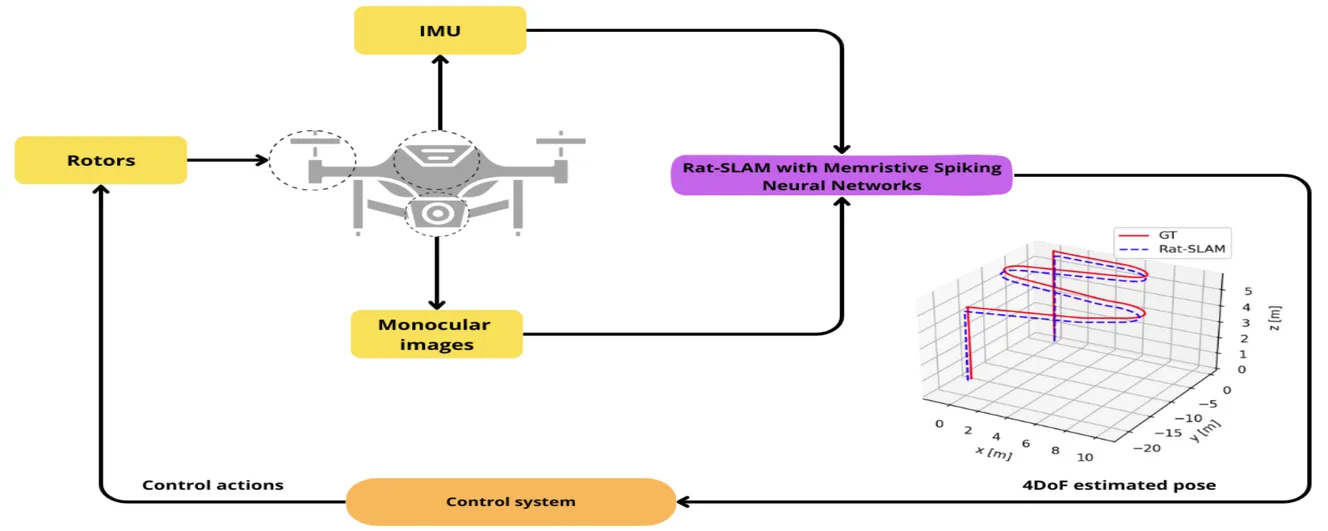
Unmanned Aerial Vehicles (UAVs) are versatile platforms with potential applications in precision agriculture, disaster management, and more. A core need across these applications is a navigation system that accurately estimates location based on environmental perception. Commercial UAVs use multiple onboard sensors whose fused data improves localization accuracy. The bioinspired Rat-Simultaneous Localization and Mapping (Rat-SLAM) system, is a promising alternative to be explored to tackle the localization and mapping problem of UAVs. Its cognitive capabilities, semi-metric map construction, and loop closure make it attractive for localization in complex environments. This work presents an improved Rat-SLAM algorithm for UAVs, focusing on three innovations. First, Spiking Neural Networks (SNNs) are incorporated into Rat-SLAM’s core modules to emulate biological processing with greater efficiency. Second, Neuromorphic Computing models the neurons of the SNNs, assessing the feasibility of implementing SNNs on specialized hardware to reduce software processing, a key advantage for UAVs with limited onboard resources. Third, SNNs are developed based on the Memristive Leaky Integrate-and-Fire model, integrating memristors into artificial neurons to leverage their low power and memory properties. Our approach was evaluated through trajectory simulations using the Hector Quadrotor UAV in the Gazebo environment within the Robot Operating System, yielding valuable insights and guiding future research directions.
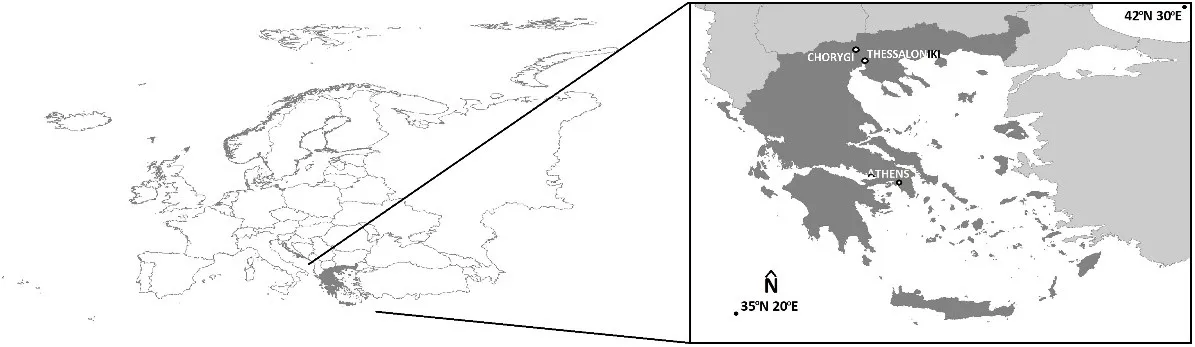
Due to the complex geometry of the monuments, it is often necessary to adapt the image collection process for their mapping. For the optimal mapping of the stronghold of Lazaritsa Chorygi (Greece) and its slopes, vertical, inclined, and horizontal images from different heights were collected using an Unmanned Aircraft System. Thus, for a monument of special archaeological/historical interest and natural beauty, a large set of high-spatial resolution data and final products (digital surface model and orthophotomosaic with spatial resolution 5.6 cm and 2.8 cm, respectively) is available. In addition, in the wider area of the fortified site, military structures (fire trenches, communication trenches, shelters, front and support trenches, and strong points) of the Great War length of 9 km were identified and mapped, which were identified in the 2003 or 2004 Google Earth Pro images, but worryingly are almost absent from the contemporary Google Earth Pro images.
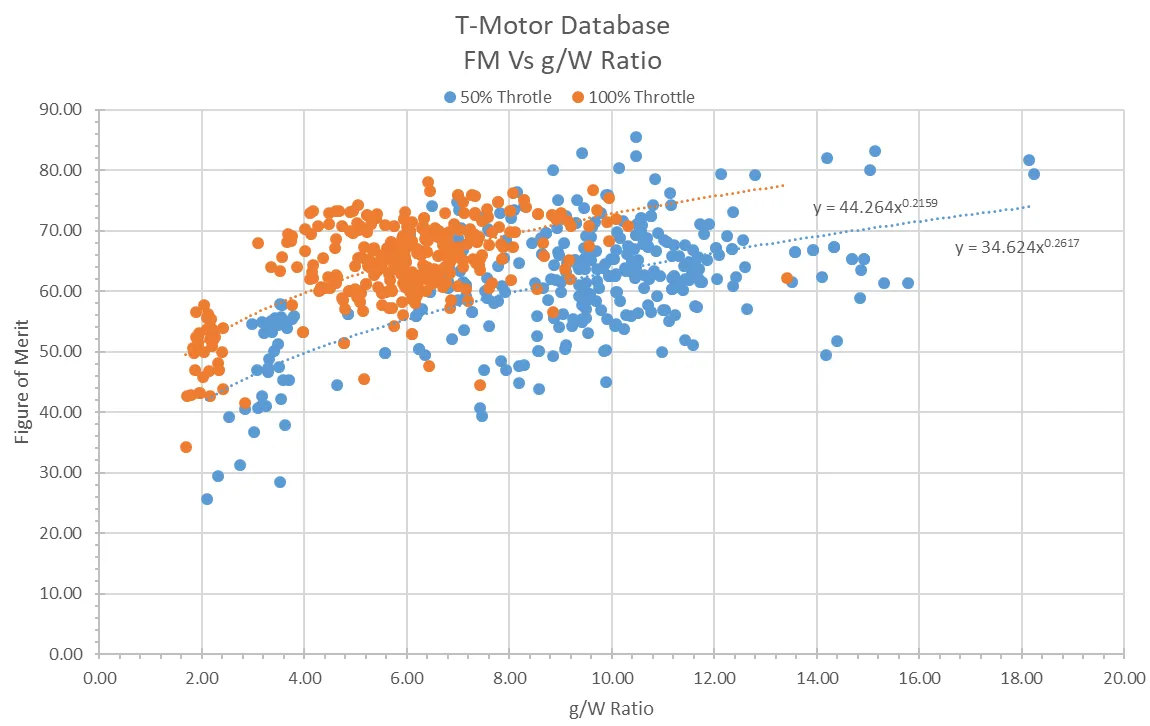
The behaviour of co-axial rotors is well understood, and they are especially practical for large UAVs due to their increased thrust without changing the vehicle footprint. However, for co-axial systems with varying propeller diameters between the two disks, research is more limited. The goal of this paper was to determine an optimal configuration for several different unequal co-axial setups using numerous different propeller combinations and separation ratios. Propellers with diameters of 26 and 29 inches are tested at separation ratios of 0.05 to 0.35. Thrust and power were collected using an off-the-shelf FS15-TYTO thrust stand, with the upstream and downstream propellers running at equal throttles. From this, performance was assessed through efficiency, thrust, and power consumption, and comparisons were made to an ideal combination without losses. The results show that for unequal combinations, the user should place the smaller propeller upstream for greater efficiency, but for maximum thrust capacity, two equal propellers are preferred. When compared to two independent rotors of the same size, a 26″ upstream rotor and a 29″ downstream rotor minimised thrust loss to 16%, compared to 23% for the opposite arrangement. It was also found that the optimal separation ratio is always approximately 0.2.
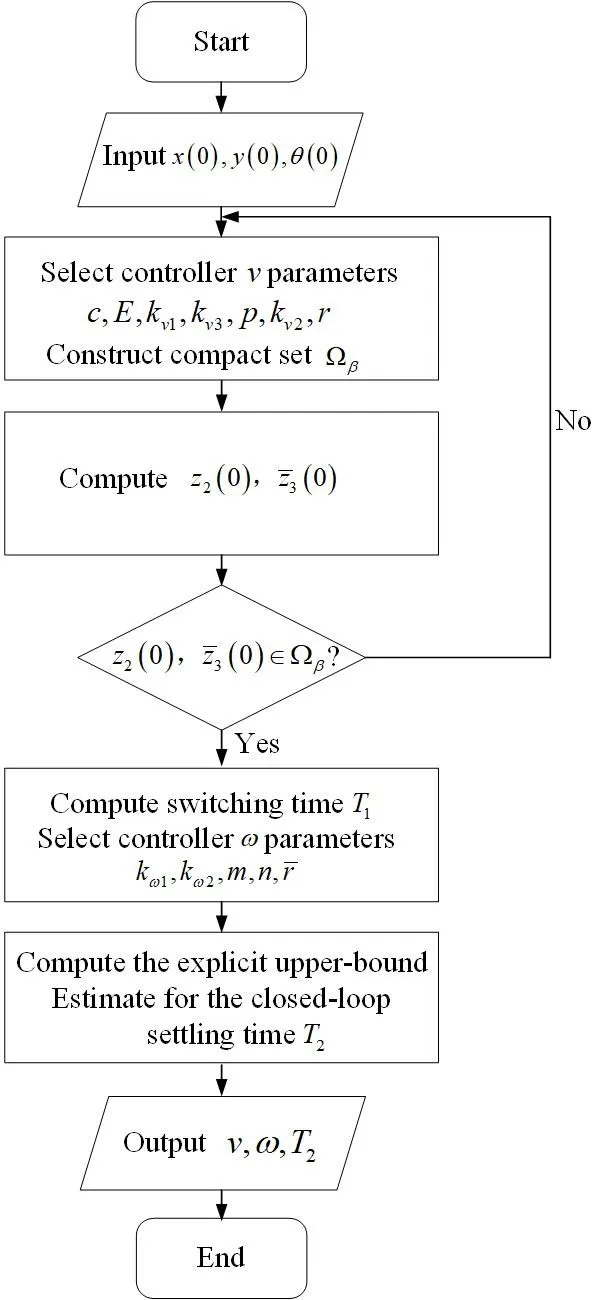
This paper addresses the finite-time stabilization problem for a nonholonomic wheeled mobile robot (NWMR) with input constraints. By utilizing the hyperbolic tangent function tanh(·), bounded finite-time stabilization controllers are developed. In addition, an explicit upper-bound estimate for the closed-loop settling time is given, and the level of input constraints is characterized by parameters that depend on the actuator’s capacity. A thorough finite-time stability analysis is carried out using appropriate Lyapunov functions. For a compact set contained in the domain of attraction, a guideline is presented to clarify how to construct it. Finally, simulation results show the effectiveness of the developed controllers.
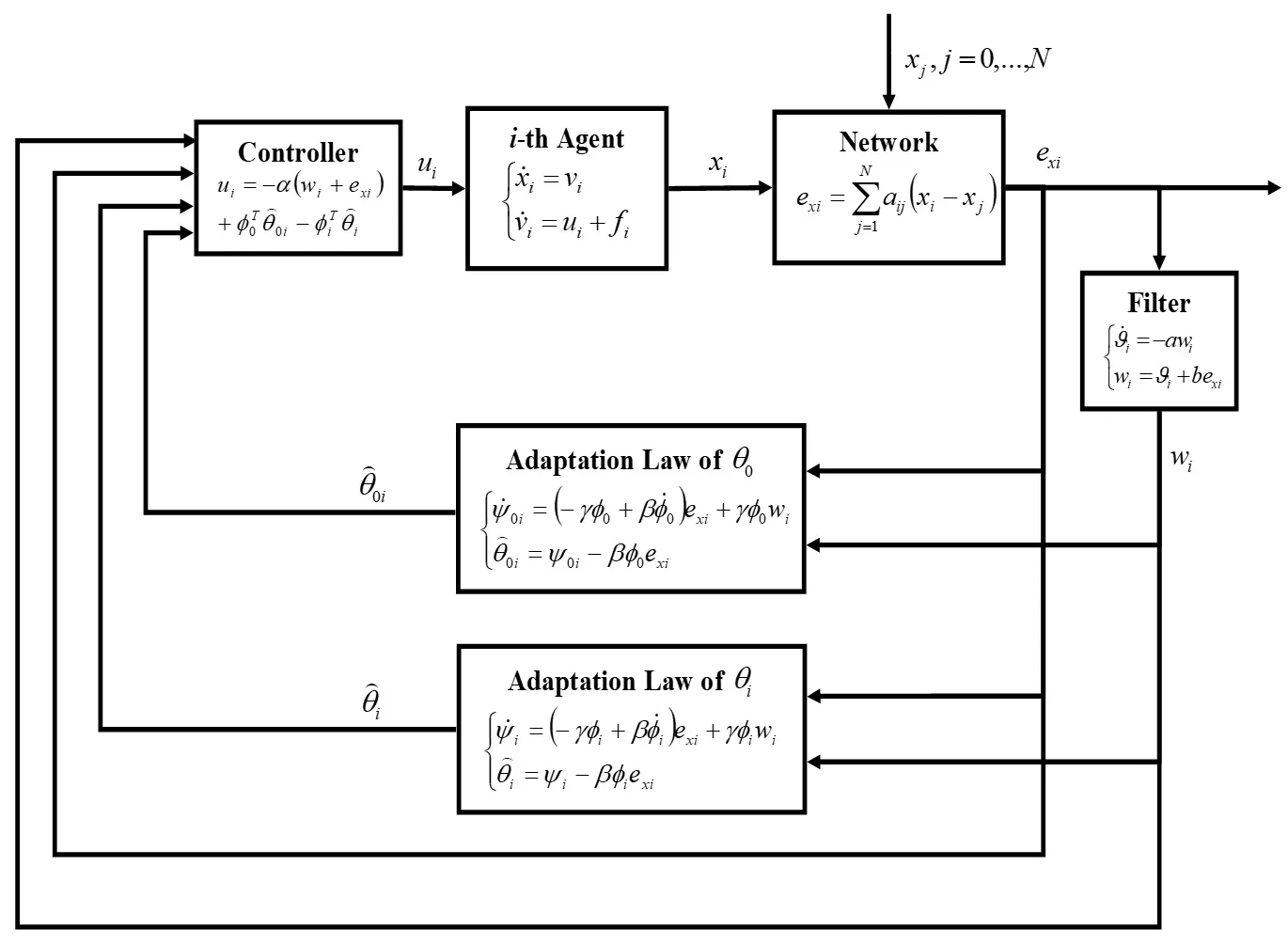
In this paper, the distributed leader-follower consensus of a group of agents with second-order dynamics under the undirected graph communication topology is studied. The main objective of this study is to solve a major practical multi-agent problem in which the acceleration of the leader is not communicated to each follower. In contrast, the follower agents include some unknown dynamics in their intrinsic structure. By assuming a linear regression structure for leader acceleration and agent’s unknown dynamics, Lyapunov-based adaptive control algorithms are devised to control the network of agents in the presence of the communication loss and modeling uncertainties. The presented study describes two multi-agent control strategies called fully-distributed adaptive control (FDAC) and partially-distributed adaptive control (PDAC) systems in the first method, the followers do not have any a priori information about the communication graph, while in the second method, some information about the eigenvalues of the communication graph is available. The mathematical manipulations required to prove the stability of the FDAC and PDAC methods are presented. Finally, illustrative simulations are conducted to render the proposed algorithms’ merits and efficiencies.
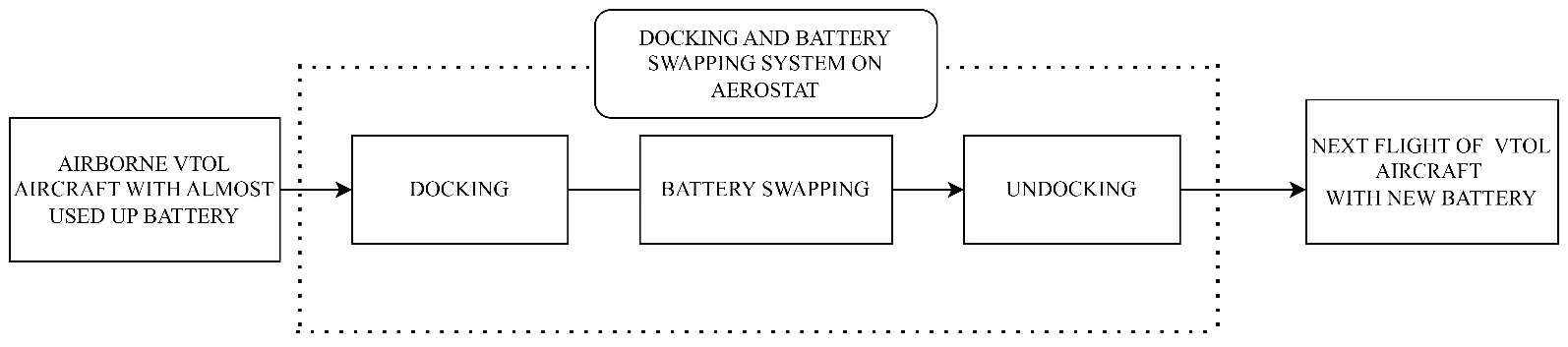
In response to the ever-growing global demand for Unmanned Aerial Vehicles, efficient battery solutions have become vital. This paper proposes a design and concept of an Autonomous Mid Air Battery Swapping System for Vertical Take-Off and Landing Unmanned Aerial Vehicles. The proposed design integrates Aerial Mechatronics, Lighter than Air Systems, and Digital Modelling by leveraging the innovative concept of aerostats for battery swapping. This adaptive and effective technology paves the way for the next generation of autonomous Vertical Take-Off and Landing, ensuring a longer flight time and range. Modern-day technologies have empowered Unmanned Aerial Vehicles to operate autonomously and be remotely controlled, expanding their utility across diverse industries. The enhanced Vertical Take-Off and Landing capabilities include the ability to dock on an aerostat-mounted system, facilitating seamless battery swapping without human intervention and ensuring extended flight duration and operational flexibility. These advancements promise to broaden the applications of Unmanned Aerial Vehicles across various industries.
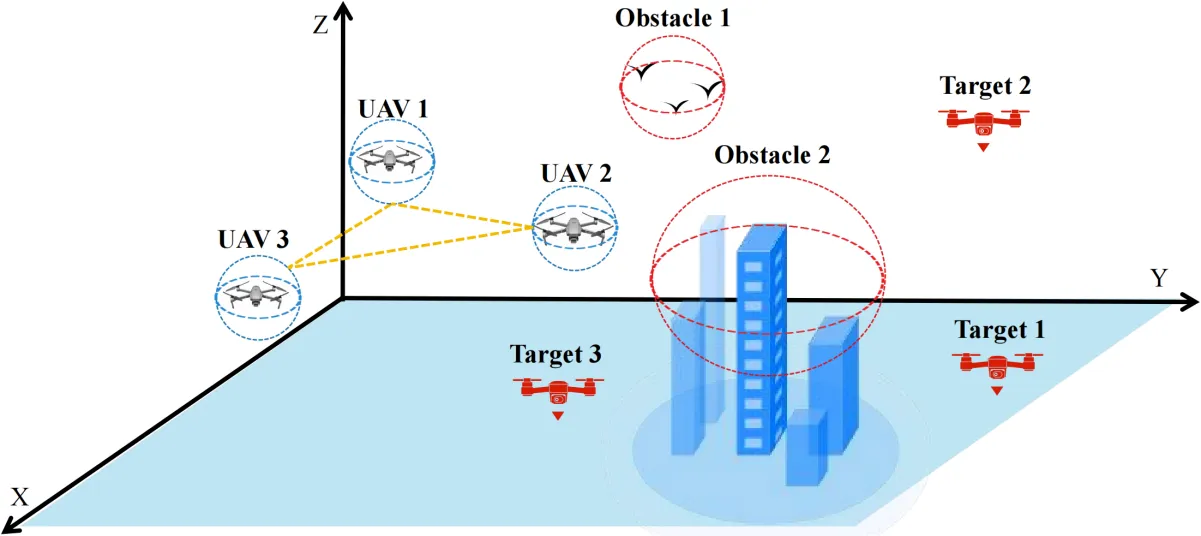
This paper proposes a distributed reinforcement learning method for multi-robot cooperative target search based on policy gradient in 3D dynamic environments. The objective is to find all hostile drones which are considered as targets with the minimal search time while avoiding obstacles. First, the motion model for unmanned aerial vehicles and obstacles in a dynamic 3D environments is presented. Then, a reward function is designed based on environmental feedback and obstacle avoidance. A loss function and its gradient are designed based on the expected cumulative reward and its differentiation. Next, the expected cumulative reward is optimized by a reinforcement learning algorithm that makes the loss function update in the direction of the gradient. When the variance of the expected cumulative reward is lower than a specified threshold, the unmanned aerial vehicle obtains the optimal search policy. Finally, simulation results demonstrate that the proposed method effectively enables unmanned aerial vehicles to identify all targets in the dynamic 3D airspace while avoiding obstacles.
Amid a global metacrisis of health, environmental and economic challenges, medical delivery drones (or uncrewed aerial vehicles) offer a promising method to prepare for, and rapidly respond, to future emergencies. This opinion article summarizes the current medical delivery drone landscape, evidence base, and policy implications in the context of public health emergencies, such as pandemics, natural disasters, and humanitarian crises, with a particular emphasis on the region of sub-Saharan Africa. Using a multilateral, international health policy perspective, key challenges and opportunities, such as the development of sustainable funding mechanisms, robust regulatory frameworks, and capacity building, are identified.
This paper, intended for expert and non-expert audiences, evaluates the technical and regulatory requirements for Unmanned Aerial Systems (UAS) to operate beyond visual line of sight (BVLOS) services. UAS BVLOS operations have the potential to unlock value for the industry. However, the regulatory requirements and process can be complex and challenging for UAS operators. The work explored the BVLOS regulatory regime in the UK, Europe and the US and found similarities in process and requirements covering themes like Detect and Avoid (DAA), Remote identification and Reliable Connectivity. A unifying goal across these jurisdictions is to operate BVLOS safely and securely in non-segregated airspace. However, operating BVLOS in segregated airspace as the default or routine mode could accelerate approval and adoption. The paper reviewed existing challenges, highlighting Coverage, Capacity and Redundancy as critical for UAS BVLOS Operations. The work also highlighted the crucial role of Non-terrestrial Network (NTN) assets like Satellites and HAPS (High Altitude Platform Station) since terrestrial networks (not optimised for aerial platform coverage) may not be reliable for BVLOS connectivity.
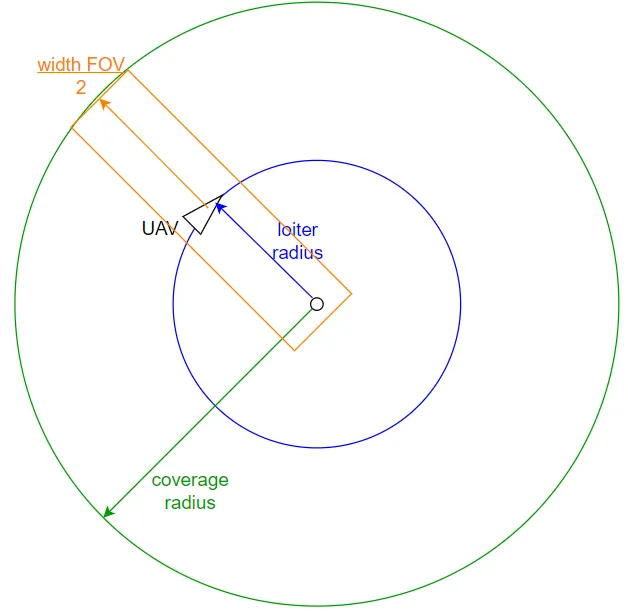
Wildfires have proven to be a significantly exigent issue over the past decades. An increasing amount of research has recently been focused on the use of Unmanned Aerial Vehicles (UAVs) and multi-UAV systems for wildfire monitoring. This work focuses on the development of a decentralized framework for the purpose of monitoring active wildfires and their surrounding areas with fixed wing UAVs. It proposes a distributed fire data update methodology, a new formation algorithm based on virtual forces, fine-tuned by a Genetic Algorithm (GA), to arrange virtual agents into the monitoring area, and a control strategy to safely and efficiently guide fixed wing UAVs to loiter over the structured virtual agents. The system is tested in Software In The Loop (SITL) simulation with up to eight UAVs. The simulation results demonstrate the effectiveness of the system in monitoring the fire in a persistent manner and providing updated situational awareness data. The experiments show that the proposed framework is able to achieve and maintain coverage up to 100% over the area of interest, and very accurate fire representation. However, the performance is decreased for the experiments with low UAV numbers and large fire sizes.
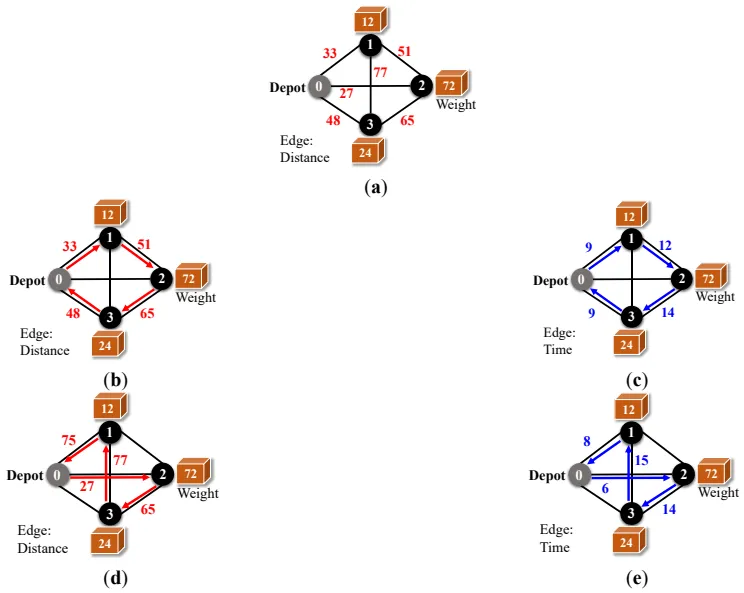
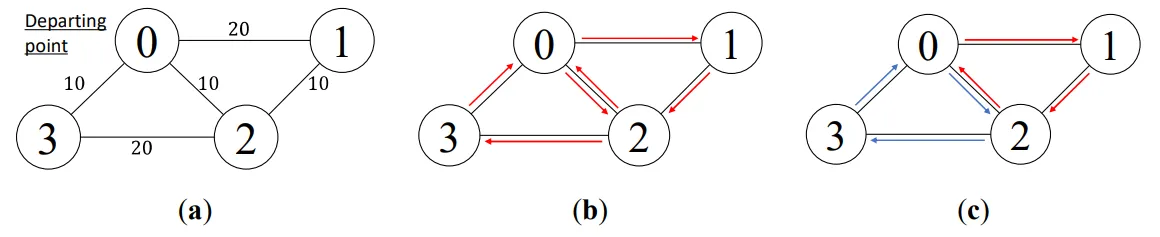
In recent years, there has been a growing interest in utilizing drones for parcel delivery among companies, aiming to address logistical challenges. However, effective optimization of delivery routes is essential. A theoretical framework termed the Flight Speed-aware Vehicle Routing Problem (FSVRP) has emerged to address the variability in drone flight speed based on payload weight. Several approximate methods have been proposed to solve the FSVRP. Our research endeavors to optimize parcel delivery efficiency and reduce delivery times by introducing a novel delivery problem. This problem accounts for multiple deliveries while considering the variability in flight speed due to diverse payloads. Through experimentation, we evaluate the efficacy of our proposed method compared to existing approaches. Specifically, we assess total flight distance and flight time. Our findings indicate that even in cases where the payload exceeds maximum capacity, all parcels can be delivered through multiple trips. Furthermore, employing a multi-trip FSVRP approach results in an average reduction of 10% in total flight time, even when payload capacities are not exceeded.
We consider a remote sensing system in which fixed sensors are placed in a region, and a single drone flies over the region to collect information from cluster heads. We assume that the drone has a fixed maximum range and that the energy consumption for information transmission from the cluster heads increases with distance according to a power law. Given these assumptions, we derive local optimum conditions for a drone path that either minimizes the total or maximum energy required by the cluster heads to transmit information to the drone. We show how a homotopy approach can produce a family of solutions for different drone path lengths so that a locally optimal solution can be found for any drone range. We implement the homotopy solution in Python and demonstrate the tradeoff between drone range and cluster head power consumption for several geometries. Execution time is sufficiently rapid for the computation to be performed in real time so that the drone path can be recalculated on the fly. The solution is shown to be globally optimal for sufficiently long drone path lengths. A proof of concept implementation in Python is available on GitHub. For future work, we indicate how the solution can be modified to accommodate moving sensors.
This paper presents, an autonomous and scalable monitoring system for early detection and spread estimation of wildfires by leveraging low-cost UAVs, satellite data and ground sensors. An array of ground sensors, such as fixed towers equipped with infrared cameras and IoT sensors strategically placed in areas with a high probability of wildfire, will work in tandem with the space domain as well as the air domain to generate an accurate and comprehensive flow of information. This system-of-systems approach aims to take advantage of the key benefits across all systems while ensuring seamless cooperation. Having scalability and effectiveness in mind, the system is designed to work with low-cost COTS UAVs that leverage infrared and RGB sensors which will act as the primary situational awareness generator on demand. AI task allocation algorithms and swarming-oriented area coverage methods are at the heart of the system, effectively managing the aerial assets High-level mission planning takes place in the GCS, where information from all sensors is gathered and compiled into a user-understandable schema. In addition, the GCS issues warnings for events such as the detection of fire and hardware failures, live video feed and lower-level control of the swarm and IoT sensors when requested. By performing intelligent sensor fusion, this solution will offer unparalleled reaction times to wildfires while also being resilient and reconfigurable should any hardware failures arise by incorporating state of the art swarming capabilities.
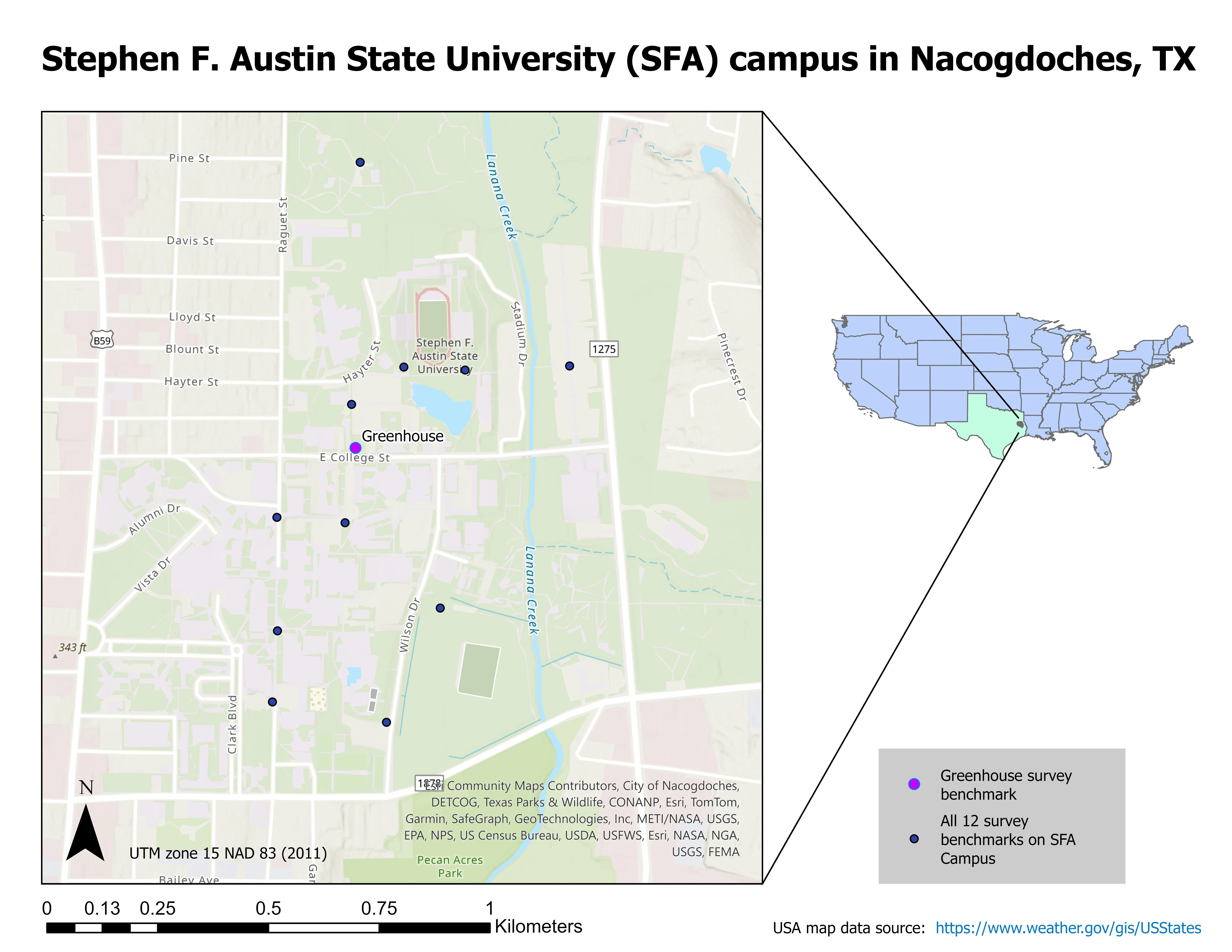
While aerial photography continues to play an integral role in forest management, its data acquisition can now be obtained through an unmanned aerial vehicle (UAV), commonly referred as a drone, instead of conventional manned aircraft. With its feasibility, a drone can be programed to take off, fly over an area following predefined paths and take images, then return to the home spot automatically. When flying over forests, it requires that there is an open space for a vertical takeoff drone to take off vertically and return safely. Hence, the automatic return-to-home feature on the drone is crucial when operating in a woodland landscape. In this project, we assessed the return-to-home landing accuracy based on a permanently marked launch pad nested in a wooded area on the campus of Stephen F. Austin State University in Nacogdoches, Texas. We compared four models of the DJI drone line, with each flown 30 missions over multiple days under different weather conditions. When each drone returned to the home launch spot and landed, the distance and direction from the launch spot to the landing position was measured. Results showed that both the Phantom 4 Advanced and the Spark had superior landing accuracy, whereas the Phantom 3 Advanced was the least accurate trailing behind the Phantom 4 Pro.

The rising cost and scarcity of human labor pose challenges in security patrolling tasks, such as facility security. Drones offer a promising solution to replace human patrols. This paper proposes two methods for finding the minimum number of drones required for efficient surveillance routing: an ILP-based method and a greedy method. We evaluate these methods through experiments, comparing the minimum number of required drones and algorithm runtime. The findings indicate that the ILP-based method consistently yields the same or a lower number of drones needed for surveillance compared to the greedy method, with a 73.3% success rate in achieving better results. However, the greedy method consistently finishes within one second, whereas the ILP-based method sometimes significantly increases when dealing with 14 more locations. As a case study, we apply the greedy method to identify the minimum drone surveillance route for the Osaka-Ibaraki Campus of Ritsumeikan University.
In agriculture, medicine, and engineering, sudden fire outbreaks are prevalent. During such events, the ensuing fire spread is extensive and unpredictable, necessitating crucial data for effective response and control. To address this need, the current initiative focuses on utilizing an Unmanned Aerial Vehicle (UAV) with an Infrared (IR) sensor. This sensor detects and analyses temperature variations, accompanied by additional camera footage capturing thermal images to pinpoint the locations of the incidents precisely. The UAV’s programming is executed using Arduino-Nano and mission planner software, interfacing with the Pixhawk flight controller operating in a guided mode for autonomous navigation. The UAV configuration includes a radio module interfacing with Arduino-Nano, a flight controller, and remote-control functionality. The flight duration is approximately 10–15 min, contingent upon flight dynamics and environmental temperature. Throughout its airborne operation, the UAV transmits live telemetry and log feeds to the connected computer, displaying critical parameters such as altitude, temperature, battery status, vertical speed, and distance from the operator. The Pixhawk flight controller is specifically programmed to govern the UAV’s behavior, issuing warnings to the pilot in case of low voltage, prompting a timely landing to avert potential crashes. In case of in-flight instability or a crash, the mission planner can trace the UAV’s location, facilitating efficient recovery and minimizing costs and component availability losses. This integrated approach enhances situational awareness and mitigation strategies, offering a comprehensive solution for managing fire incidents in diverse fields.
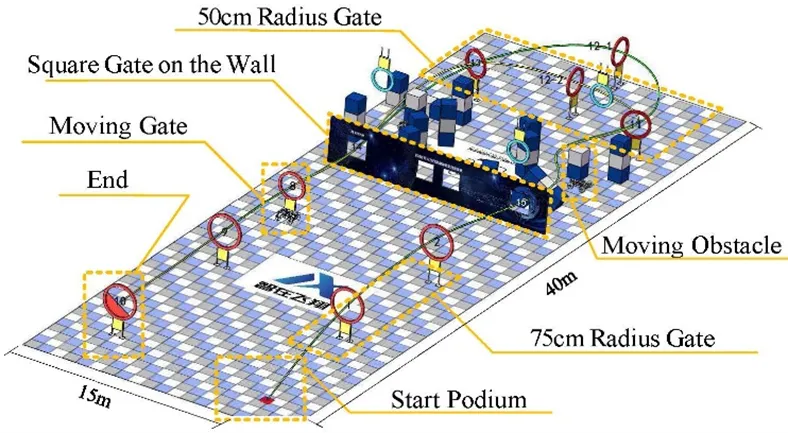
In this paper, an autonomous system is developed for drone racing. On account of their vast consumption of computing resources, the methods for visual navigation commonly employed are discarded, such as visual-inertial odometry (VIO) or simultaneous localization and mapping (SLAM). A series of navigation algorithms for autonomous drone racing, which can operate without the aid of the information on the external position, are proposed: one for lightweight gate detection, achieving gates detection with a frequency of 60 Hz; one for direct collision detection, seeking the maximum passability in-depth images. Besides, a velocity planner is adopted to generate velocity commands according to the results from visual navigation, which are enabled to perform a guidance role when the drone is approaching and passing through gates, assisting it in avoiding obstacles and searching for temporarily invisible gates. The approach proposed above has been demonstrated to successfully help our drone passing-through complex environments with a maximum speed of 2.5 m/s and ranked first at the 2022 RoboMaster Intelligent UAV Championship.
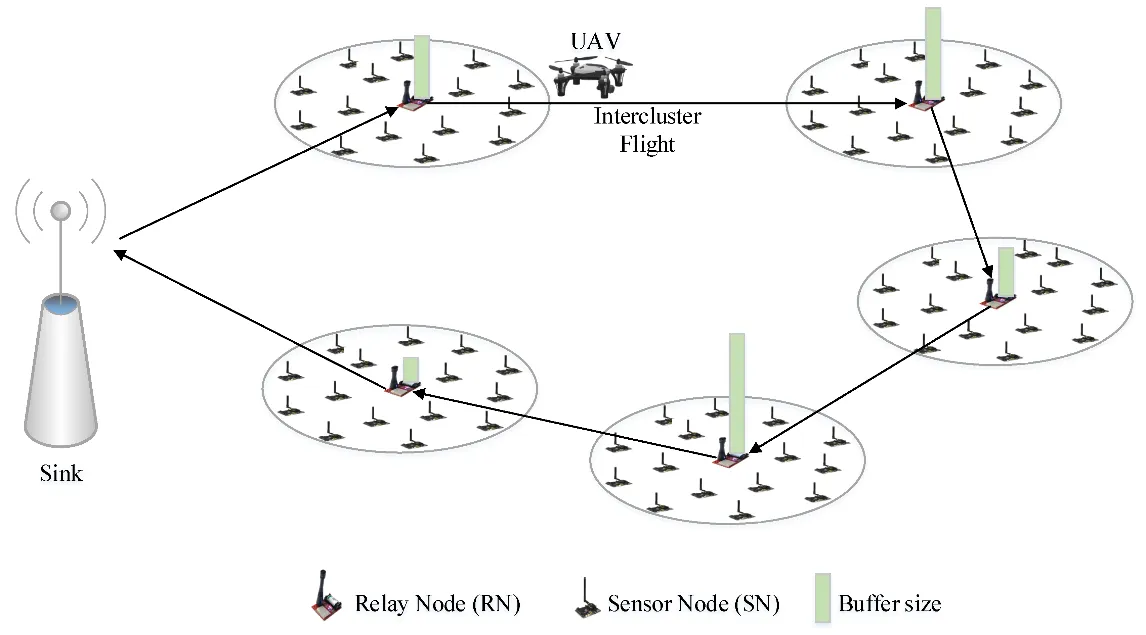
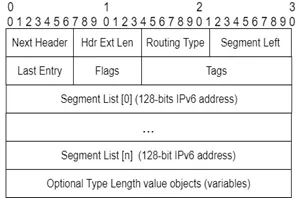
Unmanned aerial vehicles (UAVs) have been used to establish flying ad hoc networks (FANETs) to support wireless communication in various scenarios, from disaster situations to wireless coverage extensions. However, the operation of FANETs faces mobility, wireless network variations and topology challenges. Conventional mobile ad hoc network and vehicular ad hoc network routing concepts have rarely been applied to FANETs, and even then they have produced unsatisfactory performance due to additional challenges not found in such networks. For instance, position-based routing protocols have been applied in FANET, but have failed to achieve adequate performance in large networks. Clustering solutions have also been used in large networks, but with a significant overhead in keeping track of the complete topology. Hence, to solve this problem, we propose a hybrid position-based segment-by-segment routing mechanism for clustered FANETs. This approach facilitates traffic engineering across multiple wireless clusters by combining position-based inter-cluster routing with a rank-based intra-cluster routing approach capable of balancing traffic loads between alternative cluster heads. Simulation results show that our solution achieves, on average, a lower power consumption of 72.5 J, a higher throughput of 275 Mbps and a much lower routing overhead of 17.5% when compared to other state-of-the-art end-to-end routing approaches.
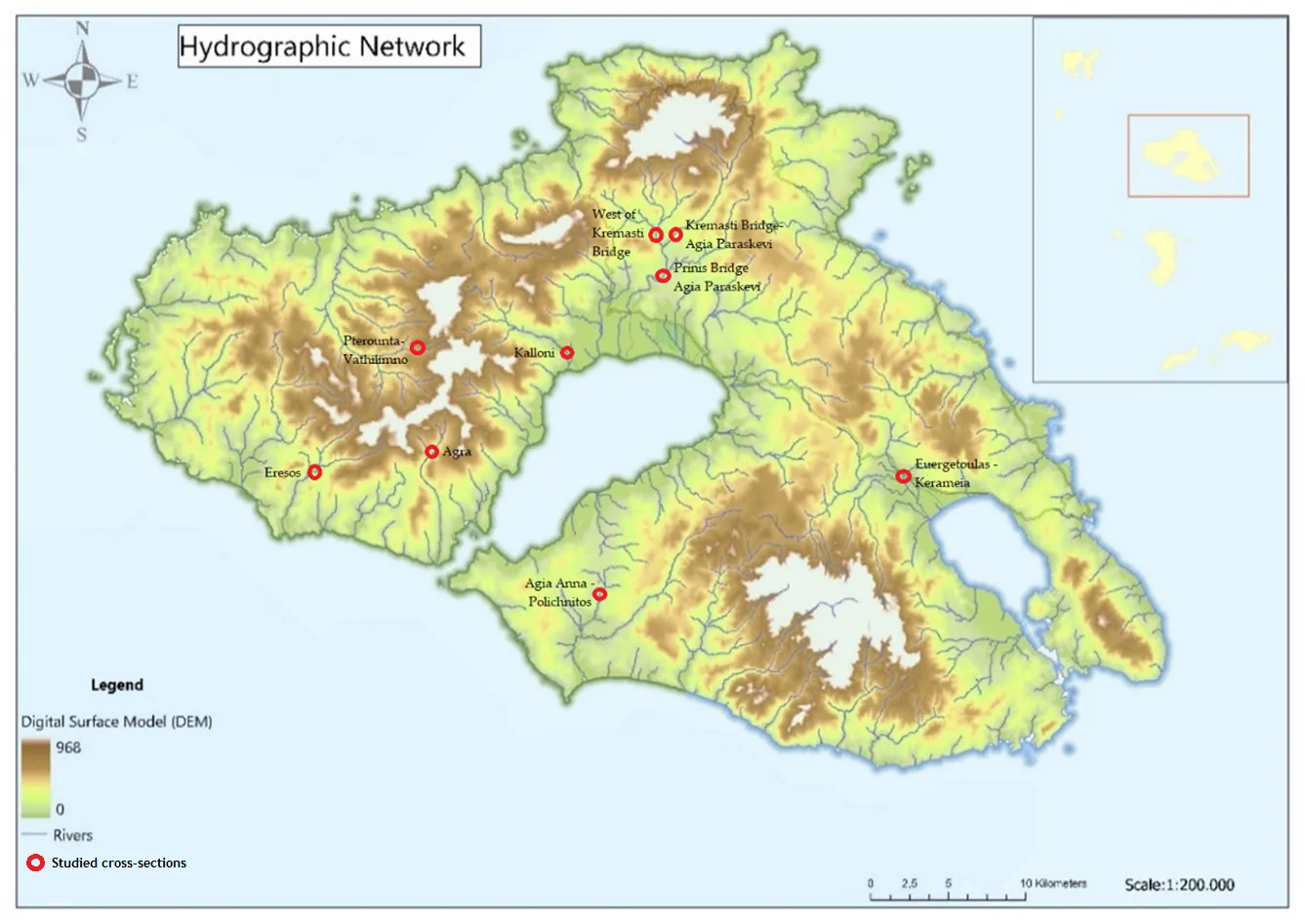
Temporary streams are a key component of the hydrological cycle in arid and semi-arid regions, but their flow is highly variable and difficult to measure. In this paper, we present a novel approach that could be used to assess the flow of temporary streams this allowing to characterize their environmental status. Specifically, we apply the Image Velocimetry (IV) method to estimate surface velocity in temporary streams using Unmanned Aerial Vehicles (UAVs) equipped with optical sensors (IV-UAV method). The IV-UAV method enables the easy, safe and quick estimation of the velocity on the water’s surface. This method was applied in different temporary streams in Lesvos Island, Greece. The results obtained indicate that the IV-UAV can be implemented at low discharges, temporary streams and small streams. Specifically, the water depth ranged from 0.02 m to 0.28 m, while the channel width ranged from 0.6 m to 4.0 m. The estimated surface velocity ranged from 0.0 to 5.5 m/s; thus, the maximum water discharge was 0.60 m3/s for the largest monitored stream of the island. However, there were many occasions that measurements were unable due to various reasons such as dense vegetation or archaeological sites. Despite of this, the proposed methodology could be incorporated in optical protocols which are used to assess the environmental status of temporary streams of Mediterranean conditions. Finally, this would become a valuable tool for understanding the dynamics of these ecosystems and monitoring changes over time.
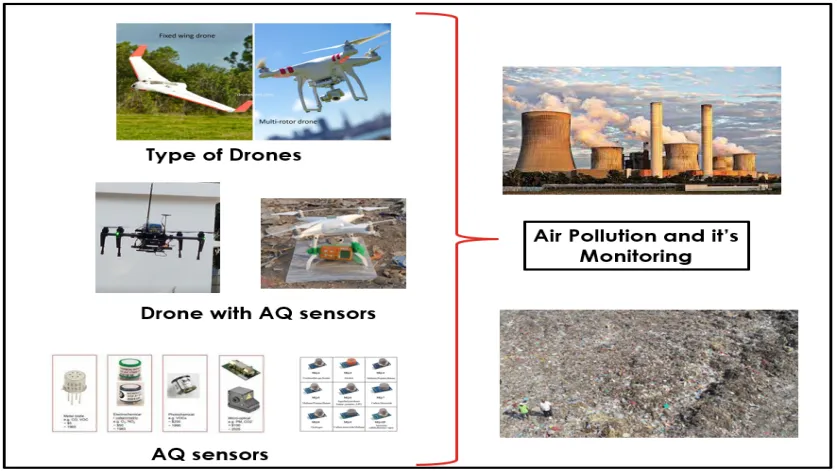
Drone-aided systems have gained popularity in the last few decades due to their stability in various commercial sectors and military applications. The conventional ambient air quality monitoring stations (AAQMS) are immovable and big. This drawback has been significantly overcome by drone-aided low-cost sensor (LCS) modules. As a result, much research work, media information, and technical notes have been released on drone-aided air quality and ecological monitoring and mapping applications. This work is a sincere effort to provide a comprehensive and structured review of commercial drone applications for air quality and environmental monitoring. The collected scientific and non-scientific information was divided according to the different drone models, sensor types, and payload weights. The payload component is very critical in stablility of the multirotor drones. Most study projects installed inexpensive sensors on drones according to the avilibility of the space on drone frame. After reviewing of multiple environmental applications the common payload range was 0 gm to 4000 gm. The crucial elements are addressed, including their relation to meteorological factors, air isokinetics, propeller-induced downwash, sensor mounting location, ramifications etc. As a result, technical recommendations for AQ monitoring assisted by drones are addressed in the debate part. This work will help researchers and environmentalists choose sensor-specific payloads for drones and mounting locations. Also, it enables advanced methods of monitoring parameters that help policymakers to frame advanced protocols and sensor databases for the environment and ecology.
This paper presents a method for fault tolerant control of quadrotor UAVs in case of inversion of the torque direction, a situation that might occur due to structural, hardware or software issues. The proposed design is based on multiple-model ℒ1 adaptive control. The controller is composed of a nominal reference model and a set of degraded reference models. The nominal model is that with desired dynamics that are optimal regarding some specific criteria. In a degraded model, the performance criteria are reduced. It is designed to ensure system robustness in the presence of critical failures. The controller is tested in simulations and it is shown that the multiple model ℒ1 adaptive controller stabilizes the system in case of inversion of the control input, while the ℒ1 adaptive controller with a single nominal model fails.
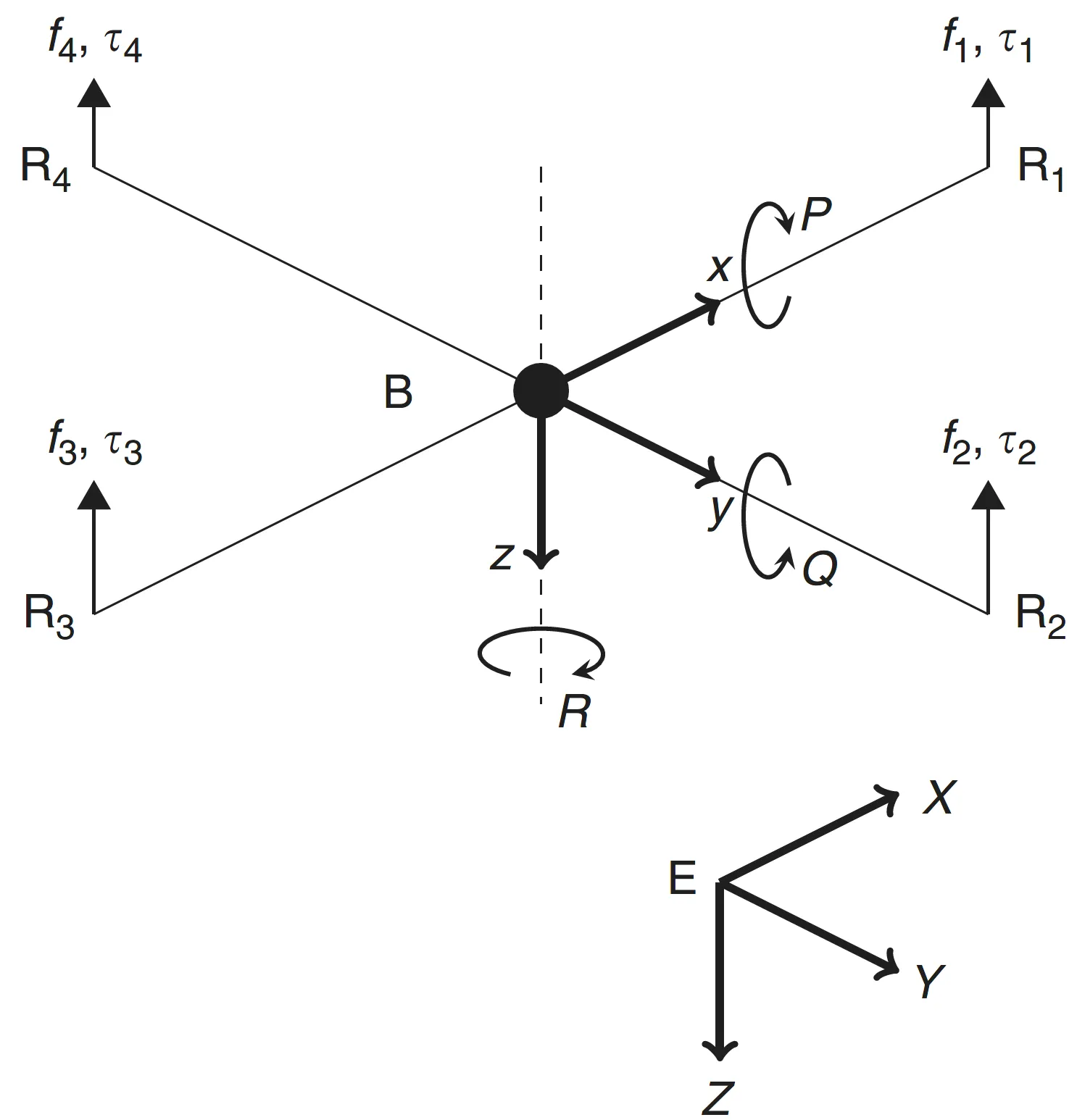
In recent years, the use of Unmanned Aerial Systems (UAS) to obtain imagery for photogrammetry has become commonplace. Using these data to develop 3D products has also grown significantly in both research and commercial applications. This study aims to find a relatively simple and low cost UAS flight method as a means to obtain data to produce a 3D model suitable for 3D printing. The study subject chosen to assess different flight methods was the Caddo House at Caddo Mounds State Historical Site located near Alto, Cherokee County, Texas, USA. To collect images for analysis, a DJI Phantom 4 Pro UAS was used with Pix4DCapture mission control app. Two main missions were carried out, one being a pre-defined double-grid flight, and the other being an orbital free-flight method. The findings of this study indicate that if the goal is to create a true-to-life 3D model of an object using UAS, the best method would be a curated orbital free-flight method. If there is time constraint and the subject is sufficiently large and not considerably irregular, a double-grid mission with sufficient forward and side overlap can produce desirable results, but with a slight loss of fine details. The 3D model developed from the curated orbital flight method was successfully printed with a customer grade FDM 3D printer.

In this paper, image fusion is performed by utilizing images derived from different cameras for the unmanned aerial vehicle (UAV). By producing the fused image, the spatial resolution of the multispectral (MS) image is improved on the one hand and the classification accuracy on the other hand. First, however, the horizontal and vertical accuracy of the generated products, orthophoto mosaics, and digital surface models, is determined using checkpoints that do not participate in the processing of the image blocks. Also, the changes of these accuracies with a 50% increase (or decrease) of the UAV's flight height are determined. The study area is the Early Christian Basilica C and the flanking Roman buildings, at the archaeological site of Amphipolis (Eastern Macedonia, Greece).