1. Introduction
In most of the world’s populated towns, tracking air quality and analyzing peripheral environments have become regular tasks [
1,
2]. According to the World Health Organization, air pollution is responsible for one in nine fatalities, and 92% of the population surpasses the WHO-set limiting values [
3]. In most places, pollution levels rise above legal boundaries, influencing the world’s forests, wildlife, and green spaces [
4,
5]. This is due to climate change and urban growth [
6,
7]. Checking the concentration of air pollutants numerically and qualitatively in various settings in accordance with the permitted national boundaries of air pollutants is known as “air quality monitoring”. The dispersion of dangerous contaminants in the air disrupts the equilibrium of the atmosphere, draws numerous diseases to living things, and harms the natural environment [
8,
9].
The danger posed by polluted air to both humans and the environment is well known. Additionally, air pollution worsens the surrounding ecosystem and offers a means for bacteria, viruses, etc. to disseminate airborne diseases over long distances. The elevated levels of carbon monoxide can result in cellular hypoxia, lethargy, headaches, vertigo, disorientation, and other unpleasant symptoms. Ozone causes airways inflammation, wheezing, and painful or scratchy throats, making the lungs more prone to infection. In contrast to carbon dioxide, which contributes to global warming, ammonia produces alveolar oedema and bronchiolar irritation [
1]. Nitrogen dioxide has been linked to the development of asthma.
In recent years, numerous studies on air pollution and ecology have clarified the effects of air pollutants on local vegetation, fauna, historical places, and ecology. [
10] Sophisticated data loggers and monitors create connections and prediction models concerning the local ecology and weather. Air contaminants are changing because of weather, wind, topography, plant zones, atmospheric temps, industrial sources, population growth, etc. Consequently, pollution and the its impact zone are constantly in raising day by day.
1.1. Air Pollutant and Protocol
Areas with harmful and dangerous air quality can be found using the Air Quality Index. Carbon dioxide (CO
2), carbon monoxide (CO), nitrogen dioxide (NO
2), nitric oxide (NO), ozone (O
3), sulfur dioxide (SO
2), volatile organic compounds (VOC), suspended particulate matter (SPM), respirable suspended particulate matter (RSPM). Other contaminants are all prevalent on the earth’s surface. Based on recommendations from the World Health Organization (WHO) and the United States Environmental Protection Agency (US-EPA), national organizations like the Central Pollution Control Board (CPCB) have given the limiting values of different contaminants. The air quality indicator is a tool for converting pollutant-weighted values into a single or group of figures.
The air quality index is intended to assist local government, stakeholders, and policymakers in addressing issues related to air pollution, making decisions, ranking locations according to their air quality, raising public awareness about these issues through scientific research, and tracking changes in air quality. The sub-index approach technique has led to the development of an algorithm to calculate the air quality index (AQI). One should use the correct methods for collecting air contaminants from ambient air to determine the AQI of a given area. Standard air pollution monitoring tools and stationary sensors were among the conventional tracking techniques.
These tools are commonly regarded as the pinnacle of state administration. For instance, 122 National Ambient Air Quality Surveillance (NAAQMS) sites are working in India, as a growing nation. Multiple pollutants can be simultaneously collected and identified using these instruments. The NAAQMS locations have used conventional (CPCB and EPA-approved) and gravimetric methods for PM (Purohit et al., 2019). These things cost a lot of money, require a lot of upkeep, are stationary, and only show ground-level pollution levels. They are uncommon because they need a lot of energy and are expenses to keep working 24×7. Many times it is tough to indetify the sudden increase of pollutant levels in ambient environment via such expensive setups.
1.2. LCS for Air Quality
These instruments are frequently evaluated as the highest form of state control. For instance, India, a developing country, has 122 National Ambient Air Quality Monitoring (NAAQMS) locations. These tools are capable of concurrently gathering and detecting multiple pollutants. The conventional (CPCB and EPA-approved) and gravimetric technique for PM have been implemented by the NAAQMS sites. These devices are costly, need a lot of maintenance, are not movable, and only measure pollution at the ground level. They are rare because they are costly to maintain and use a lot of electricity.
The beer-Lamberts law states that the quantity of gas present instantly affects how much light it absorbs, is the basis for the IR-absorption sensor. These gadgets use an IR (Light Emitting Diode) LED or a similar source. The PID tracking can be used to measure temperature, humidity, MQ gas, and electrochemical sensor concentrations. To detect a variety of pollutants, low-cost monitors such as CO
2, CO, NO
2, NO, O
3, SO
2, VOC, etc. can be used. They support the detailed analysis of the air quality monitoring at various locations. For example, MQ-135 has a weight of 4 gm, and the cost is 1.70 USD; MQ-7 has a weight of 2 g, and the cost is 7.24 USD; Figaro TGS2442 has a weight of 2 g, and the cost is 18.19 USD, and cost of the temperature sensor LM35 is INR. 49 [
11]. However, the LCS are normally used for qualitative analysis of the air pollutants, the repetability of the sensor and detection limit is important in order to choos any sensor. The recent trands in electrochemical and optical sensor are showing these sensors can be used for quantitative analysis of the pollutants provided calibration frequency should be more. The minimum sampling time of the low cost sensor is in 1 s. Therfore, a minor spike or change in the concentration of air pollutant could be detected by using such LCS modules. The machine learning algorithm, background factors cab be embedded in the the sensor data processing unit manually.The recent advancement in the LCS has improved the lifetime, reliability and accuracy of these modules and made them robust for longterm application of 1–2 years. The calibration with the standard was one the expsensive and complex tast in these sensors. However, in the last few decades this problem has been overcome due to availibity of standard gases in the 1 lit canister option. Due to this facility the user can perform a multipoint calibration on site also.
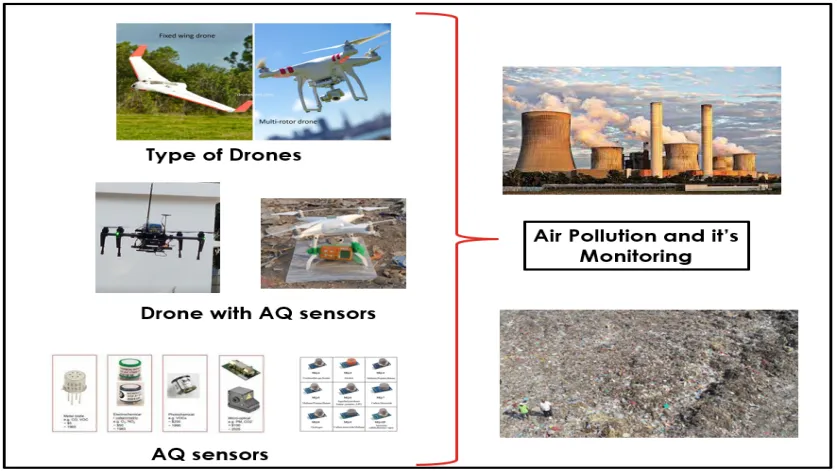
1.3. Drone for Air Environment
One of the research work [
12] showed how drone technology has advanced for business use. Applications in the fields of ecology, environment, water quality analysis, air, municipal solid waste (MSW), energy, and other sectors, such as health care, materials, and mining, have been compiled and categorized according to the range of applications by [
12]. The primary goal was to review the different drone applications that have been created in the environmental domain.
Drone technology has advanced for commercial uses, as shown by applications that have been gathered and divided according to the scope of service and have been demonstrated in the fields of ecology, environment, water quality analysis, air, Municipal Solid Waste (MSW), energy, and other sectors, such as health care, materials, and mining, among others. Therefore, the main goal of this study was to review the different drone applications deveoped in the environmental domain. The fixed-wing was used for carbon dioxide measurement, and the rotary can be used for both methane and carbon dioxide measurements [
13,
14].
The work done by [
15] used a plastic sheet that is readily replaceable to mount sensors on drones. The quadcopter was employed to measure methane levels in oil areas. 2019 had measured gas both laterally and vertically using a fixed wing and a quadcopter, respectively. Subsequently, [
16] have used a SHARP GP2Y10 optical sensor with quadcopter was observed to describe dust clouds. Also, [
14,
17] have used a DJI S900 platform-based drone called the SAV-ES UAV for air surveillance. Monica’s cargo, which includes the CO-A4 for measuring CO, NO2-A43F for measuring NO
2, and O3-A43F for measuring O
3, was used. It has been observed that the quadcopter had a load of 400 g but could sustain 510 g, which is 28% heavier than the payload of drones. In [
11] paper, they had observed using quadcopters with 400 g payload in exploration and data collection needs. The sensors used were MQ-135, MQ-7 Figaro TGS2600, Figaro TGS2602, HM-10 (Bluetooth), ESP8266 (WiFi). Moreover, at [
18], they used a quadcopter that had a maximum load of 1000 g. The weight of the sensor node attached to the drone was 540 g. Somewhere, they also used DJI Inspire 2 drones [
19] with 4000 g weight and used a payload of 1900 g. Further to this , [
20] have used low-cost Mini-drones of the carolo family to measure temperature and humidity where manned air vehicles were restricted. Take-off weight of M2AV was 5000 g. Though, they [
21] have loaded CO
2 measurement device in payload box, The maximum payload of the kite plane used is 4000 g. In one work, [
22] used two different kinds of payloads. First was of 1500 g which was used for measuring SO
2.
The Mini Gas payload is located at the side of the UAV to estimate the parameters like temperature, pressure, humidity, SO
2, H
2S, and CO
2. Research [
23,
24] also used simulation (Computational Fluid Dynamics (CFD) simulation of a quadcopter). Work of [
16,
25] shows aerodynamic studies to understand the influence of the air in lab-level experiments. The measurement of quadcopter airflow is done to conclude that the location for sensors on drones should be the center of the top side of the quadcopter. They initially considered two options for establishing sensors, one centered at the top and the other outside the quadcopter. The first option is simple and does not alter the center of gravity of the UAV. They conducted an experiment with and without active propellers and concluded that airflows would not significantly influence the sensors in the first option. The work [
26,
27,
28,
29] have considered three different schemes for the location of sensors: above the UAV, under the UAV, and using exceptional support outside the UAV. depicts the different drone mounted based air quality systems that helps us to choose multiple mounts or sensors as per the payload capacity of the drone. According to the analysis given in the article, scheme one and scheme two have the same impact of airspeed on gas measurement because the airspeed is lesser at the centre and its exterior. There is less turbulence impact on the first scheme but less on the third scheme. Therefore, locating sensors outside the frame is the best if turbulence impact is considered, but scheme three is more complex, and scheme one is simple.
. Drone-assisted Air Quality Systems.
2. Materials and Methods
The drone-related technical research material from the environment and ecology field was gathered from various scientific research papers and case studies from 2005 to 2021. The keywords from the collected publications are separated into a single keyword bank. Then the Google Cloud tool was used to highlight the essential keywords in the reviewed research articles. Then the data was further segregated as per air, water, MSW and ecology components.
Over the last decades, numerous studies have been done on the market available low-cost sensors. The studies were segregated as per the drone type, model, application domain and payload to understand the standard range of attachments for AQ and ecological monitoring applications. While collecting the data of various drone-aided applications, the sensors and camera locations were emphasized for designing the standard method and fixed sensor mounting location to conduct drone-aided environmental monitoring activity.
3. Results
3.1. Analysis Using AI Toolbox
depicts the results of Google Cloud, which helps understand the current research trends in the specific domain. The Microsoft Office toolbox word cloud was used for graph plotting the data. The keywords highlighting air pollution are more in the drone-aided systems. This type of pre-scan using advanced tools like cloud platforms is always essential to understand the initial research direction and objectives behind the latest technologies. This shows now in environmental sectors many reserachers are applying their knowledge to develop a drone aided environmental sensing application.
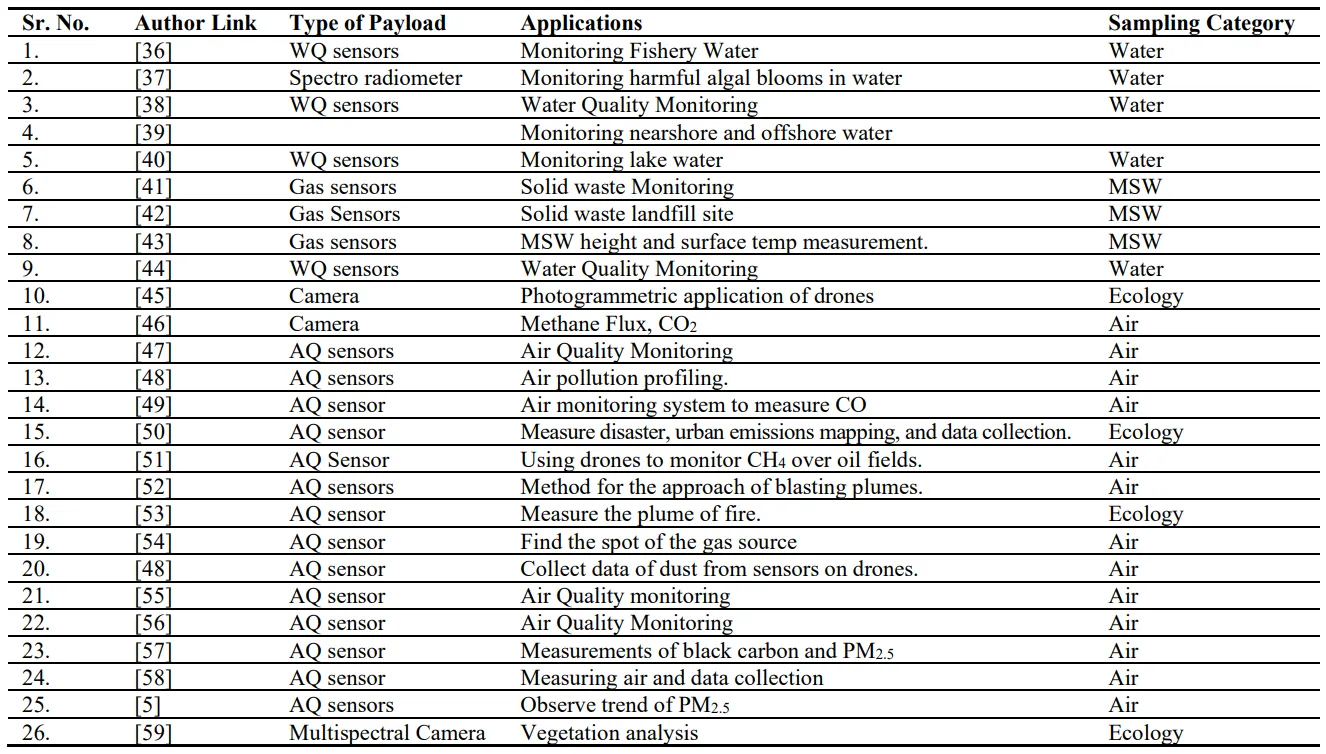
3.2. Payload for AQ
Payload refers to a drone’s weight and any sensors, cameras, or other devices affixed to it. Drones, such as sensors, cameras, trackers, sniffers, etc., can have various payloads connected to them [
30]. The flight duration of battery-powered drones is inversely correlated with the shipment. As a result, the load used for air quality monitoring is always an essential component of experiments using drones to help with monitoring [
10,
31]. presents a systematic list of the different drone types used for air quality measurement. Recent papers and research show that only multirotor drones have been used as a platform for air quality monitoring in the last ten years. The primary goal of this work was to evaluate all R&D studies that used air quality and environmental sensors; as a result, the applications of photogrammetry were not covered. The EPA [
32,
33,
34,
35] and National Pollution Control Board agencies’ recommended sampling methods, sampling protocols, and sensor protocols are all important aspects of environmental sampling in process engineering. The creation of different 2D and 3D maps using RGB cameras catalyzed the use of drones in environmental surveillance. The use of the camera as a sensor is expected in photogrammetry. In , the different ecological sampling applications are listed.
. Usage of Drone for Environmental Sampling: (Air/Water/MSW/others).
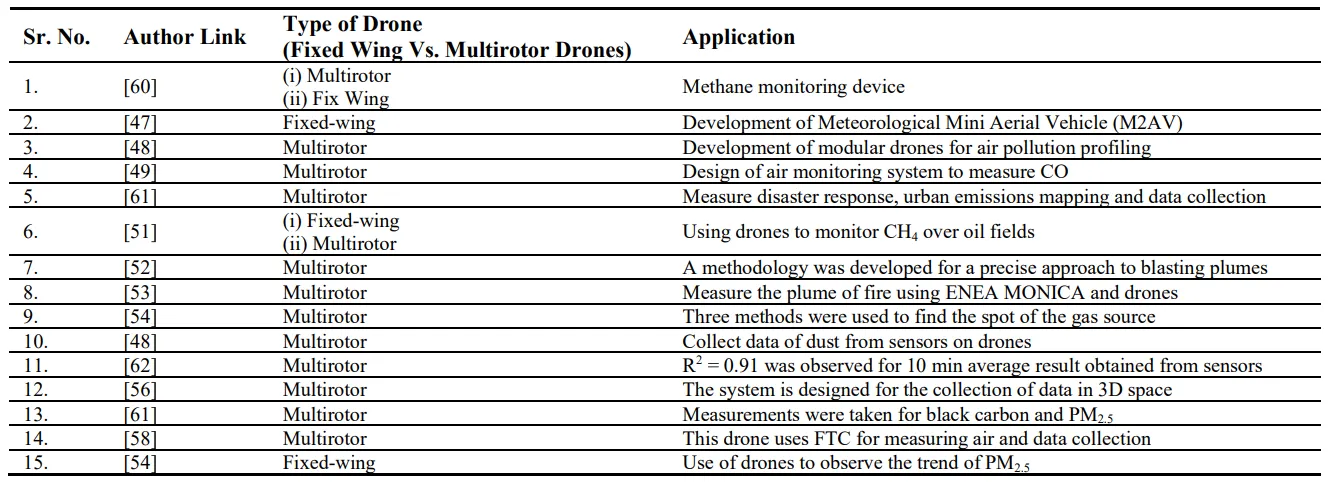
The two main categories of drones are fixed-wing and multi-rotor (tricopter, quadcopter, hexacopter, octocopter, etc.). Their use changes depending on the drone’s fame type. As a result, the gathered study articles and disclosed applications were divided according to the kind of drone. The type of drone and its intended uses are shown in .
. Types of Drones and their Application.
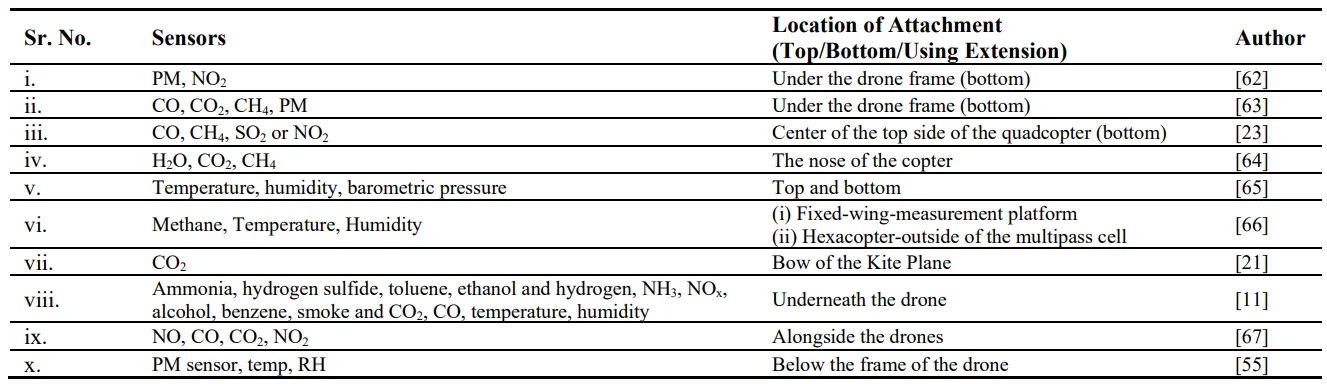
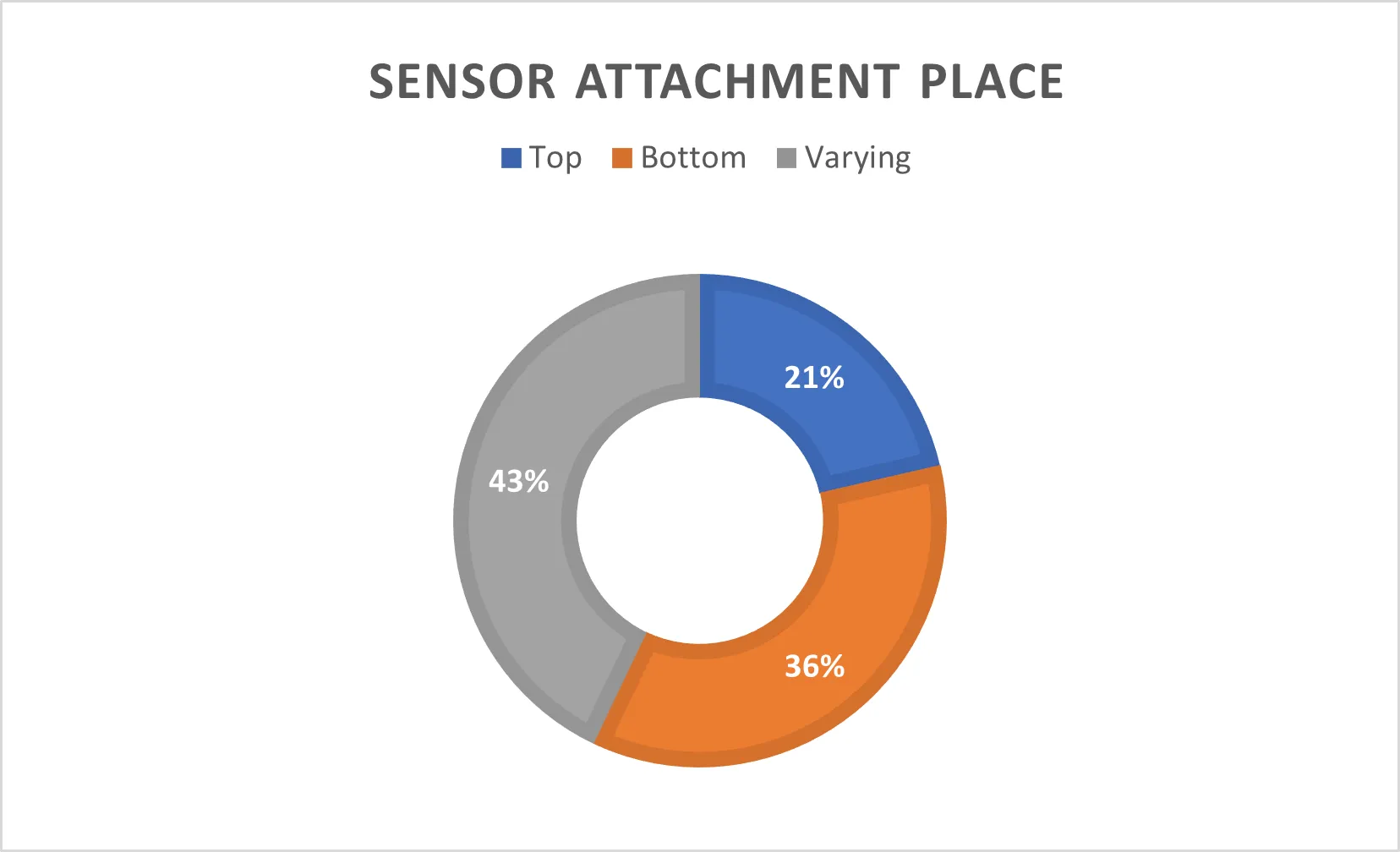
As evidenced by numerous articles that have been published, the location of the sensors’ mounting points varied depending on the operator’s needs and considered a variety of variables, including turbulence, wind effects, the drone’s structure, and practicality. However, there was no established protocol used to interface or install drone sensors. While some publications placed the sensors below the drone, others attached them to the top of the drone. During the attachment of the sensors to the drone, very few components conducted Computational Fluid Dynamics (CFD) analyses or comparable downwash studies. Therefore, we have segregated the data into different categories depending on the sensor’s location attached to the drone. The sensor type and location play a critical role in the air quality monitoring process. Nature teaches us how to develop any strategy for monitoring of environmental parameters. Various sensors need to be attached to these drones to acquire data remotely. How to connect and where to attach such sensors is always a challenging task for environmental engineers. Generally, air quality sensors have a cross-sensitivity effect with meteorological parameters like temperature and humidity, wind, etc. Most of the the drone’s designs are biomimetic designs. In most applications, data was collected using a simple sensor and its moon; however, very few studies have understood the sensor’s attachment to the drone. . Depicts the various studies that reveal the sensor mounting locations during their experimental work.
. Sensors Mounting Location.
The graph depicts in the preference for the location of sensors on a drone. It can be attached to an extending gimbal, in front of the drone, under or above the drone [
32,
33,
68,
69]. We see here that the majority prefers using an extended gimbal or attachment. Many have also chosen to attach sensors under the drone, considering wind, turbulence, and other factors. The exciting information from the reviewed paper is that 43% of studies have attached the AQ sensors using attachments/extenders or telescopic arms to get accurate data from the air quality sensors [
70,
71].
. Attachment of Sensor Module with Drone.
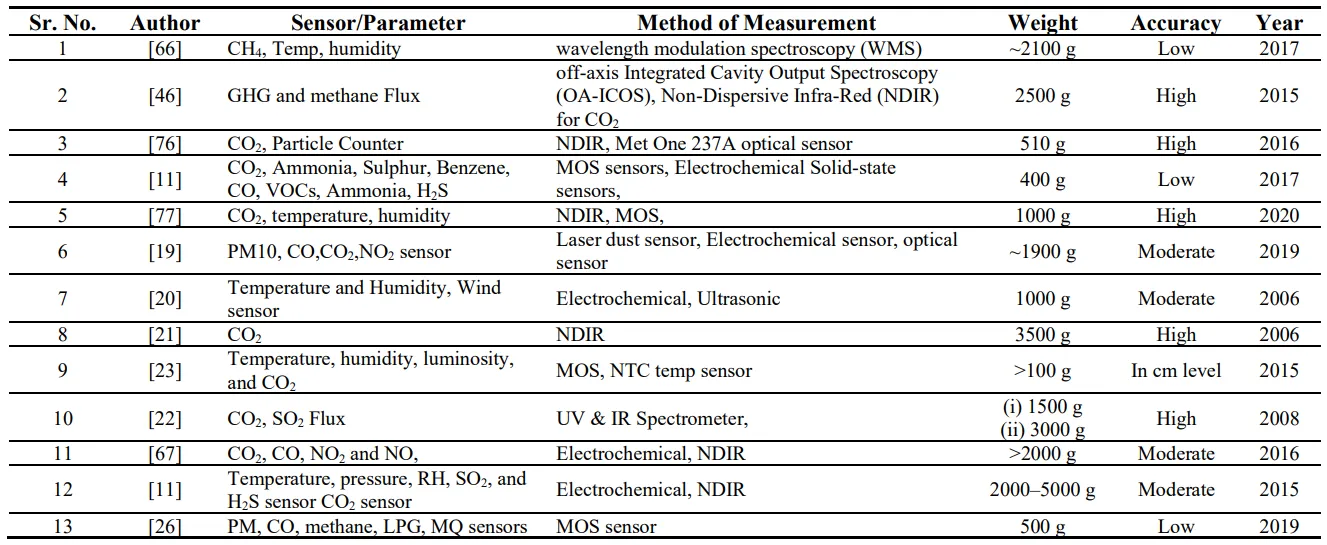
In addition, the payload weight depends on the intended purpose. The sensor technologies are trying to make the sensor smaller and lighter with a variety of wireless features [
28,
72]. The user is now able to gather data from far-off locations without the interference of humans thanks to technologies like Internet of Things (IoT) and Long-Range Radio (LoRA). Such developed systems are adaptable to mounting on a variety of drones with an air-payload capability. The initial sensor payload from the different air quality monitoring studies was separated from the takeoff payload [
73]. lists the sensor payload details and the different types of detecting techniques used in the system under development.
. Payload used (Sensor’s weight and parameter) [
25,
74,
75].
The study’s economic implications depend on instrumentation, software and workforce utilized to conduct any experimental work. Therefore, the cost of the sensors mounted on a drone is important [
13,
15,
16]. The sensor cost is mentioned in to understand the commercial viability of LCS-enabled monitoring devices.
In demand were fixed-wing drones from 2004 to 2021. For use in the air, fixed-wing drones require a distinct airstrip, a skilled pilot, a sizable infrastructure, and cutting-edge software. After that, multirotor drones for aerial surveys were developed. shows a pie graphic with multirotor and fixed-wing drones [
14]. The fixed-wing drone has only been used for purposes. But this air quality tracking application. The percentage of research that used multirotor drones is shown in the pie chart below at 73.3%. This demonstrates the researchers’ preference for multirotor UAVs due to their broad range of possible applications.
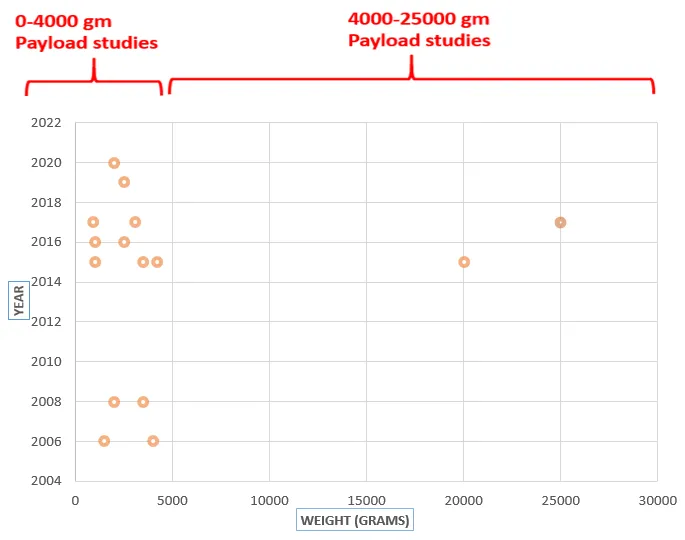
The payload used on the drones in different articles is shown in the graph below, which is depicted in [
81,
82,
83]. It has been noted that most trials used drones with payload capacities of under 4000 g. These drones have been used because of their high endurance, ample payload capability, lengthy flight times, and simplicity of operation in any environment [
84,
85]. The cargo comprises low-cost sensors, microcontrollers, GPS, and other components. Most tests have been conducted with sensor modules weighing under 4000 gm. As depicted in , the 0–4000 gm is the sable range of operation for the AQ ad sensor-enabled drones.
. Application of Multirotor Drones in Environmental Monitoring.
. Payload used for AQ Monitoring Applications.
4. Discussion
4.1. Role of Meteorological Parameters during AQ Monitoring
The sensor’s output is affected by meteorological parameters such as temperature, humidity, moisture, wind speed, wind direction, dew point, air flow rates, and light conditions. Amongst these, the sensors are sensitive to the propeller’s downwash effect [
82,
86,
87,
88]. If the sensor is exposed to high wind conditions, the resident time for the pollutants in a detection chamber will always be less. In such cases, the monitoring results of contaminants, such as PM, VOC, CO, NO
2, etc., will differ from the actual results. This deviation can lead to false AQ data generation [
25,
75,
89]. Therefore, the flow chamber is required for any air quality monitoring experiments.
Similarly, during photographic applications, the gimble of the camera drone plays a critical role in data acquisition. The gimble part works as the neck of the camera, and it is always sensitive to high wind conditions and dust particles. The low light zone affects the image resolution and histogram for large-area surveys. Hence, ecological surveys using LIDAR/multispectral cameras of forests, wetlands, etc., should be conducted during winter or sunny days.
4.2. Sensors and Camera Mounting Locations
The inexpensive MOS, electrochemical, and optical instruments are perceptive to factors such as wind, humidity, and temperature [
90,
91,
92]. For the different drone-assisted air quality systems to provide accurate data, this sensor attachment is an essential component. However, many researchers simply attach the air quality sensors without first knowing the kinematics of the air and how propellers interact with it. The studies show that 35.7% of studies have the sensor modules attached to the drone’s bottom edge [
88,
90,
94,
95]. Therefore, as depicted in , it is recommended that the AQ, Gas, or any sensor should be mounted away from the drone. The location of the sensor mounting should always be at the top side of the drone to avoid air turbulence and propeller interference [
96,
97,
98]. The top position of the AQ sensor also so as not to get disturbed during the sampling and monitoring instances. Hence, it is the best position for a multirotor UAV to attach the sensors. The camera needs stability while collecting the vertical (45° to 90°) images. Hence, RGB, multispectral, and LIDAR kinds of payloads should always be mounted at the drone’s downside.
. Fixed location for mounting of environmental Sensors.
The inexpensive MOS, electrochemical, and optical instruments are perceptive to factors such as wind, humidity, and temperature [
31,
99,
100]. This sensor attachment is an essential component for the different drone-assisted air quality systems to provide accurate data. The government has restricted drone flying locations and updated the guidelines for sensitive zone and airports. Therefore, in certain experiments, the user may not be able to collect the AQ and data. Certain locations, like sensitive zone and forest zones, have restrictions on drone flying time. The user can conduct mapping and monitoring in such an area after the approved authority’s permission. These guidelines are formulated to protect biodiversity and ecology from foreign entities like human beings and machines.The flight time due to battery is also one of the limited due to type of battery, metrial, its qulity etc. It is observed in most of the studies that the flight time was around 20–25 min. The tread off between flight time and payload was observed in most of the studies. The battery life is generally observed upto 280–300 cycles. However, more advance options like fuel cell power batteries, Li-ion batteries are increasing the battery life and flight time of the drone.
4.4. Future Trends in AQ and Relevant Monitoring
The AI-ML algorithms are making these devices more intelligent and more automated so that they can complete any job that is inaccessible to humans, such as monitoring volcanoes or conducting a penguin census [
2,
71,
101]. Drones with advanced features like waterproof and amphibian capabilities can partially address the issue of marine surveillance. Due to the widespread acceptance of their designs and sizes, mimic bio drones and micro drones will become more prevalent in the area of ecology [
84,
102,
103,
104]. Future uses like planting and pollination may make use of the micro drone.
AI-driven drones like SWARM drones can target any mission using the automated protocol [
85,
93,
105,
106,
107]. The activities such as pollination, pollutant tracking, and killing of specific bacteria can be achieved by using such drones in the future [
85,
90]. These technologies will connect the machine with human beings to protect nature and predict future threats. Therefore, more research in AI-driven drones is required to convert such applications into products.
5. Conclusions
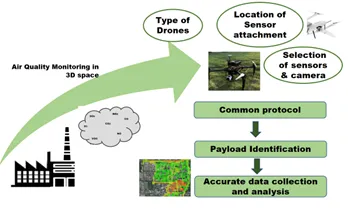
A detailed and systematic review of drone-aided AQ and ecological monitoring systems has been conducted. It is observed that the sensors used for such complex air quality monitoring in 3D space need various calibration checks and standard protocols of sensor attachments. Different air quality sampling and environmental monitoring methods are more applicable in multirotor UAVs/drones. The poor spate-temporal stability in 3D space, complex sensor attachments and launching pad requirements, and high operating cost limit the use of fixed-wing drones in developing nations and complex tasks. These systems need more research to use in the environmental domain. However, its long flight time and large payload capacity proved a very strong candidate for surveying and low-altitude photogrammetric applications.
The existing drone-enabled technologies in environmental sampling applications have shifted to air quality applications, and more than 48% of the users are working in the drone-aided air quality monitoring domain. This shows that drone technology can collect air quality data in 3D space. Such data can be used in various air quality models for validation and predictions. However, the sensor’s payload capacity, attachment, and type of sensors are critical parameters to collect precise air quality data.
However, a lot of researchers are concentrating on how these sensors are attached to different drones. However, most of the systems hid the research done to lessen the effects of the air draft/downwash created by the drone’s blades. Therefore, a device with such sensors may cause data to drift. To obtain exact information on air pollution concentrations in 3D space, more study in the attachment of the sensors is necessary. Compared to gas-powered vehicles, the environmental emissions are minimal. To fully comprehend the effect of drones on the environment, a thorough analysis of the GHG emissions from all types of UAVs is necessary.
Acknowledgments
The authors are thankful to The Director, CSIR-NEERI, for providing the necessary facilities and encouragement to conduct this state-of-the-art review work.
Author Contributions
Conceptualization: P.K.; Methodology: P.K.; Validation: A.M.; Formal Analysis: P.K. and S.S.; Investigation: G.S. and P.K.; Resources: P.K. and A.M.; Software: G.S. and P.K.; Data Curation: P.K., G.S. and A.N.; Writing—Original Draft Preparation: P.K; Writing—Review & Editing: G.S and P.K.; Visualization: P.K.; Supervision: P.K. and S.S.
Funding
No funding has been received for this work.
Declaration of Competing Interest
The authors declare that they have no conflict of interest.
References
-
1.
Coeckelbergh M. Drones, information technology, and distance: mapping the moral epistemology of remote fighting.
Ethic. Inf. Technol. 2013,
15, 87–98.
[Google Scholar]
-
2.
Rohi G, Ejofodomi O, Ofualagba G. Autonomous monitoring, analysis, and countering of air pollution using environmental drones.
Heliyon 2020,
6, e03252.
[Google Scholar]
-
3.
-
4.
Carrico CM, Karacaoglu J. Impacts of a Prescribed Fire on Air Quality in Central New Mexico.
Atmosphere 2023,
14, 316.
[Google Scholar]
-
5.
Torresan C, Berton A, Carotenuto F, Di Gennaro SF, Gioli B, Matese A, et al. Forestry applications of UAVs in Europe: a review.
Int. J. Remote Sens. 2017,
38, 2427–2447.
[Google Scholar]
-
6.
Kubota T, Chyee DTH, Ahmad S. The effects of night ventilation technique on indoor thermal environment for residential buildings in hot-humid climate of Malaysia.
Energy Build. 2009,
41, 829–839.
[Google Scholar]
-
7.
Gharaibeh AA, Jaradat MA, Kanaan LM. A Machine Learning Framework for Assessing Urban Growth of Cities and Suitability Analysis.
Land 2023,
12, 214.
[Google Scholar]
-
8.
Barnett AG, Williams GM, Schwartz J, Best TL, Neller AH, Petroeschevsky AL, et al. The Effects of Air Pollution on Hospitalizations for Cardiovascular Disease in Elderly People in Australian and New Zealand Cities.
Environ. Health Perspect. 2006,
114, 1018–1023.
[Google Scholar]
-
9.
Boman BC, Forsberg AB, Järvholm BG. Adverse health effects from ambient air pollution in relation to residential wood combustion in modern society.
Scand. J. Work. Environ. Health 2003,
29, 251–260.
[Google Scholar]
-
10.
Dunn DH. Drones: disembodied aerial warfare and the unarticulated threat.
Int. Aff. 2013,
89, 1237–1246.
[Google Scholar]
-
11.
Diaz JA, Pieri D, Wright K, Sorensen P, Kline-Shoder R, Arkin CR, et al. Unmanned Aerial Mass Spectrometer Systems for In-Situ Volcanic Plume Analysis.
J. Am. Soc. Mass Spectrom 2015,
26, 292–304.
[Google Scholar]
-
12.
Lv Z. The security of Internet of drones.
Comput. Commun. 2019,
148, 208–214.
[Google Scholar]
-
13.
Irizarry J, Gheisari M, Walker BN. Usability assessment of drone technology as safety inspection tools.
J. Inf. Technol. Constr. 2012,
17, 194–212.
[Google Scholar]
-
14.
Boucher P. ‘You Wouldn’t have Your Granny Using Them’: Drawing Boundaries Between Acceptable and Unacceptable Applications of Civil Drones.
Sci. Eng. Ethics 2016,
22, 1391–1418.
[Google Scholar]
-
15.
Liu B, Wu C, Ma N, Chen Q, Li Y, Ye J, et al. Vertical profiling of fine particulate matter and black carbon by using unmanned aerial vehicle in Macau, China.
Sci. Total Environ. 2020,
709, 136109.
[Google Scholar]
-
16.
Appelbaum D, Nehmer RA. Using Drones in Internal and External Audits: An Exploratory Framework.
J. Emerg. Technol. Account. 2017,
14, 99–113.
[Google Scholar]
-
17.
Yepes I, Barone DAC, Porciuncula CMD. Use of Drones as Pedagogical Technology in STEM Disciplines.
Inform. Educ. Int. J. 2022,
21, 201–233.
[Google Scholar]
-
18.
Liu T, Marlier ME, DeFries RS, Westervelt DM, Xia KR, Fiore AM, et al. Seasonal impact of regional outdoor biomass burning on air pollution in three Indian cities: Delhi, Bengaluru, and Pune.
Atmos. Environ. 2018,
172, 83–92.
[Google Scholar]
-
19.
Bui XN, Lee C, Nguyen QL, Adeel A, Cao XC, Nguyen VN, et al. Use of Unmanned Aerial Vehicles for 3D topographic Mapping and Monitoring the Air Quality of Open-pit Mines.
Inżynieria Mineralna 2019,
21, 223–239.
[Google Scholar]
-
20.
Spiess T, Bange J, Buschmann M, Vörsmann P. First application of the meteorological Mini-UAV ‘M2AV’.
Meteorologische Zeitschrift 2007,
16, 159–169.
[Google Scholar]
-
21.
Watai T, Machida T, Ishizaki N, Inoue G. A Lightweight Observation System for Atmospheric Carbon Dioxide Concentration Using a Small Unmanned Aerial Vehicle.
J. Atmospheric Ocean. Technol. 2006,
23, 700–710.
[Google Scholar]
-
22.
McGonigle AJS, Aiuppa A, Giudice G, Tamburello G, Hodson AJ, Gurrieri S. Unmanned aerial vehicle measurements of volcanic carbon dioxide fluxes.
Geophys. Res. Lett. 2008,
35, L06303.
[Google Scholar]
-
23.
Roldán J, Joossen G, Sanz D, del Cerro J, Barrientos A. Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses.
Sensors 2015,
15, 3334–3350.
[Google Scholar]
-
24.
Floreano D, Wood RJ. Science, technology and the future of small autonomous drones.
Nature 2015,
521, 460–466.
[Google Scholar]
-
25.
Rao B, Gopi AG, Maione R. The societal impact of commercial drones.
Technol. Soc. 2016,
45, 83–90.
[Google Scholar]
-
26.
Koziar Y, Levchuk V, Koval A. Quadrotor Design for Outdoor Air Quality Monitoring. In Proceedings of the 2019 IEEE 39th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 16–18 April 2019.
-
27.
Lagkas T, Argyriou V, Bibi S, Sarigiannidis P. UAV IoT Framework Views and Challenges: Towards Protecting Drones as ‘Things’.
Sensors 2018,
18, 4015.
[Google Scholar]
-
28.
Sandbrook C. The social implications of using drones for biodiversity conservation.
Ambio 2015,
44, 636–647.
[Google Scholar]
-
29.
-
30.
Moon H, Martinez-Carranza J, Cieslewski T, Faessler M, Falanga D, Simovic A, et al. Challenges and implemented technologies used in autonomous drone racing.
Intell. Serv. Robot. 2019,
12, 137–148.
[Google Scholar]
-
31.
Preethi Latha T, Naga Sundari K, Cherukuri S, Prasad MVVSV. Remote sensing uav/drone technology as a tool for urban development measures in apcrda.
Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019,
42, 525–529.
[Google Scholar]
-
32.
Bravo Alvarez H, Sosa Echeverria R, Sanchez Alvarez P, Krupa S. Air Quality Standards for Particulate Matter (PM) at high altitude cities.
Environ. Pollut. 2013,
173, 255–256.
[Google Scholar]
-
33.
-
34.
Dutta PK, Mitra S. Application of Agricultural Drones and IoT to Understand Food Supply Chain During Post COVID-19. In Agricultural Informatics: Automation Using the IoT and Machine Learning; Scrivener Publishing LLC: Beverly, MA, USA, 2021; pp. 67–87.
-
35.
Sibanda M, Mutanga O, Chimonyo VG, Clulow AD, Shoko C, Mazvimavi D, et al. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South.
Drones 2021,
5, 84.
[Google Scholar]
-
36.
Cheng L, Tan X, Yao D, Xu W, Wu H, Chen Y. A Fishery Water Quality Monitoring and Prediction Evaluation System for Floating UAV Based on Time Series.
Sensors 2021,
21, 4451.
[Google Scholar]
-
37.
Becker RH, Sayers M, Dehm D, Shuchman R, Quintero K, Bosse K, et al. Unmanned aerial system based spectroradiometer for monitoring harmful algal blooms: A new paradigm in water quality monitoring.
J. Gt. Lakes Res. 2019,
45, 444–453.
[Google Scholar]
-
38.
Esakki B, Ganesan S, Mathiyazhagan S, Ramasubramanian K, Gnanasekaran B, Son B, et al. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things.
Sensors 2018,
18, 3318.
[Google Scholar]
-
39.
McEliece R, Hinz S, Guarini J-M, Coston-Guarini J. Evaluation of Nearshore and Offshore Water Quality Assessment Using UAV Multispectral Imagery.
Remote Sens. 2020,
12, 2258.
[Google Scholar]
-
40.
Rodrigues P, Marques F, Pinto E, Pombeiro R, Lourenço A, Mendonça R, et al. An open-source watertight unmanned aerial vehicle for water quality monitoring. In Proceedings of the OCEANS 2015 - MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015.
-
41.
Zhang S, Lv Y, Yang H, Han Y, Peng J, Lan J, et al. Monitoring and Quantitative Human Risk Assessment of Municipal Solid Waste Landfill Using Integrated Satellite–UAV–Ground Survey Approach.
Remote Sens. 2021,
13, 4496.
[Google Scholar]
-
42.
Baiocchi V, Napoleoni Q, Tesei M, Servodio G, Alicandro M, Costantino D. UAV for monitoring the settlement of a landfill.
Eur. J. Remote Sens. 2019,
52, 41–52.
[Google Scholar]
-
43.
Hernina R, Rokhmatuloh; Setyawan BA. Exploring the relationship of solid waste height and land surface temperature in municipality landfill site using Unmanned Aerial Vehicle (UAV) images.
IOP Conf. Ser. Earth. Env. Sci. 2020,
561, 012034.
[Google Scholar]
-
44.
Su T-C, Chou H-T. Application of Multispectral Sensors Carried on Unmanned Aerial Vehicle (UAV) to Trophic State Mapping of Small Reservoirs: A Case Study of Tain-Pu Reservoir in Kinmen, Taiwan.
Remote Sens. 2015,
7, 10078–10097.
[Google Scholar]
-
45.
Sauerbier M, Siegrist E, Eisenbeiss H, Demir N. The practical application of UAV-based photogrammetry under economic aspects.
Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2011,
3822, 45–50.
[Google Scholar]
-
46.
Allen G, Hollingsworth P, Kabbabe K, Pitt JR, Mead MI, Illingworth S, et al. The development and trial of an unmanned aerial system for the measurement of methane flux from landfill and greenhouse gas emission hotspots.
Waste Manag. 2019,
87, 883–892.
[Google Scholar]
-
47.
Martin S, Bange J, Beyrich F. Meteorological profiling of the lower troposphere using the research UAV “M2AV Carolo”.
Atmos. Meas. Tech. Discuss. 2010,
3, 5179–5209.
[Google Scholar]
-
48.
Alvarado M, Gonzalez F, Fletcher A, Doshi A. Towards the Development of a Low Cost Airborne Sensing System to Monitor Dust Particles after Blasting at Open-Pit Mine Sites.
Sensors 2015,
15, 19667–19687.
[Google Scholar]
-
49.
Kuantama E, Tarca R, Dzitac S, Dzitac I, Vesselenyi T, Tarca I. The Design and Experimental Development of Air Scanning Using a Sniffer Quadcopter.
Sensors 2019,
19, 3849.
[Google Scholar]
-
50.
Concas F, Mineraud J, Lagerspetz E, Varjonen S, Liu X, Puolamäki K, et al. Low-Cost Outdoor Air Quality Monitoring and Sensor Calibration: A Survey and Critical Analysis.
ACM Trans. Sen. Netw. 2021,
17, 1–44.
[Google Scholar]
-
51.
Schuyler TJ, Bailey SCC, Guzman MI. Monitoring Tropospheric Gases with Small Unmanned Aerial Systems (sUAS) during the Second CLOUDMAP Flight Campaign.
Atmosphere 2019,
10, 434.
[Google Scholar]
-
52.
Alvarado M, Gonzalez F, Erskine P, Cliff D, Heuff D. A Methodology to Monitor Airborne PM10 Dust Particles Using a Small Unmanned Aerial Vehicle.
Sensors 2017,
17, 343.
[Google Scholar]
-
53.
Carrozzo M, De Vito S, Esposito E, Salvato M, Formisano F, Massera E, et al. UAV Intelligent Chemical Multisensor Payload for Networked and Impromptu Gas Monitoring Tasks. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018.
-
54.
Neumann PP, Hernandez Bennetts V, Lilienthal AJ, Bartholmai M, Schiller JH. Gas source localization with a micro-drone using bio-inspired and particle filter-based algorithms.
Adv. Robot. 2013,
27, 725–738.
[Google Scholar]
-
55.
Mayuga GP, Favila C, Oppus C, Macatulad E, Lim LH. Airborne Particulate Matter Monitoring Using UAVs for Smart Cities and Urban Areas. In Proceedings of TENCON 2018, Jeju, Korea, 28–31 October 2018.
-
56.
Wivou J, Udawatta L, Alshehhi A, Alzaabi E, Albeloshi A, Alfalasi S. Air quality monitoring for sustainable systems via drone based technology. In Proceedings of 2016 IEEE International Conference on Information and Automation for Sustainability (ICIAfS), Galle, Sri Lanka, 16–19 December 2016.
-
57.
Filkin T, Sliusar N, Ritzkowski M, Huber-Humer M. Unmanned Aerial Vehicles for Operational Monitoring of Landfills.
Drones 2021,
5, 125.
[Google Scholar]
-
58.
Mazeh H, Saied M, Francis C. Development of a multirotor-based system for air quality monitoring. In Proceedings of 2018 Third International Conference on Electrical and Biomedical Engineering, Clean Energy and Green Computing (EBECEGC), Beirut, Lebanon, 25–27 April 2018.
-
59.
Senthilnath J, Kandukuri M, Dokania A, Ramesh KN. Application of UAV imaging platform for vegetation analysis based on spectral-spatial methods.
Comput. Electron. Agric. 2017,
140, 8–24.
[Google Scholar]
-
60.
Nuijten RJG, Coops NC, Watson C, Theberge D. Monitoring the Structure of Regenerating Vegetation Using Drone-Based Digital Aerial Photogrammetry.
Remote Sens. 2021,
13, 1942.
[Google Scholar]
-
61.
Liu S, Yang X, Zhou X. Development of a low-cost UAV-based system for CH
4 monitoring over oil fields.
Environ. Technol. 2021,
42, 3154–3163.
[Google Scholar]
-
62.
May NW, Olson NE, Panas M, Axson JL, Tirella PS, Kirpes RM, et al. Aerosol Emissions from Great Lakes Harmful Algal Blooms.
Environ. Sci Technol. 2018,
52, 397–405.
[Google Scholar]
-
63.
Naula Y, Marcelo N. Design and Implementation of a UAV-based Platform for Air Pollution Monitoring and Source Identification. In Proceedings of the Congreso Nacional de Control Automático 2017, Monterrey, Nuevo León, Mexico, 4–6 October 2017.
-
64.
Khan A, Schaefer D, Tao L, Miller DJ, Sun K, Zondlo MA, et al. Low Power Greenhouse Gas Sensors for Unmanned Aerial Vehicles.
Remote Sens. 2012,
4, 1355–1368.
[Google Scholar]
-
65.
Pochwała S, Gardecki A, Lewandowski P, Somogyi V, Anweiler S. Developing of Low-Cost Air Pollution Sensor—Measurements with the Unmanned Aerial Vehicles in Poland.
Sensors 2020,
20, 3582.
[Google Scholar]
-
66.
Golston LM, Tao L, Brosy C, Schäfer K, Wolf B, McSpiritt J, et al. Lightweight mid-infrared methane sensor for unmanned aerial systems.
Appl. Phys. B 2017,
123, 170.
[Google Scholar]
-
67.
Villa T, Salimi F, Morton K, Morawska L, Gonzalez F. Development and Validation of a UAV Based System for Air Pollution Measurements.
Sensors 2016,
16, 2202.
[Google Scholar]
-
68.
-
69.
-
70.
-
71.
Vallet APE. Borders, Fences and Walls: State of Insecurity? Ashgate Publishing: Farnham, UK, 2014.
-
72.
Smythe RJ. Realtime Data Plotting and Visualization. In Advanced Arduino Techniques in Science; Springer: Berlin, Germany, 2021.
-
73.
Clarke R. Understanding the drone epidemic.
Comput. Law Secur. Rev. 2014,
30, 230–246.
[Google Scholar]
-
74.
Boyle MJ. The Race for Drones.
Orbis 2015,
59, 76–94.
[Google Scholar]
-
75.
Clothier RA, Greer DA, Greer DG, Mehta AM. Risk Perception and the Public Acceptance of Drones.
Risk Anal. 2015,
35, 1167–1183.
[Google Scholar]
-
76.
Brady JM, Stokes MD, Bonnardel J, Bertram TH. Characterization of a Quadrotor Unmanned Aircraft System for Aerosol-Particle-Concentration Measurements.
Environ. Sci. Technol. 2016,
50, 1376–1383.
[Google Scholar]
-
77.
-
78.
Modest MF, Mazumder S. Radiative Heat Transfer; Academic Press: Cambridge, MA, USA, 2021.
-
79.
López-Granados F, Torres-Sánchez J, Jiménez-Brenes FM, Arquero O, Lovera M, de Castro AI. An efficient RGB-UAV-based platform for field almond tree phenotyping: 3-D architecture and flowering traits.
Plant Methods 2019,
15, 160.
[Google Scholar]
-
80.
Alvear O, Calafate CT, Zema NR, Natalizio E, Hernández-Orallo E, Cano JC, et al. A Discretized Approach to Air Pollution Monitoring Using UAV-based Sensing.
Mob. Netw. Appl. 2018,
23, 1693–1702.
[Google Scholar]
-
81.
Clarke R. What drones inherit from their ancestors.
Comput. Law Secur. Rev. 2014,
30, 247–262.
[Google Scholar]
-
82.
Nasir H, Goyal K, Prabhakar D. Review of Air Quality Monitoring: Case Study of India. Indian J. Sci. Technol. 2016, 9; doi:10.17485/ijst/2016/v9i44/105255.
-
83.
Custers B. Drones Here, There and Everywhere Introduction and Overview. In The Future of Drone Use: Opportunities and Threats from Ethical and Legal Perspectives; T.M.C. Asser Press: The Hague, The Netherlands, 2016.
-
84.
Boukoberine MN, Zhou Z, Benbouzid M. Power Supply Architectures for Drones—A Review. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019.
-
85.
Hussein M, Nouacer R, Corradi F, Ouhammou Y, Villar E, Tieri C, et al. Key Technologies for Safe and Autonomous Drones.
Microprocess. Microsyst. 2021,
87, 104348.
[Google Scholar]
-
86.
Yao Y, Xia H, Huang Y, Wang Y. Privacy Mechanisms for Drones: Perceptions of Drone Controllers and Bystanders. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 6–11 May 2017.
-
87.
-
88.
Kumarasuvamy AS, Rajendran RS. Real Time Monitoring and Fire Detection using Internet of Things and Cloud based Drones.
J. Soft Comput. Paradigm 2020,
2, 168–174.
[Google Scholar]
-
89.
Dering GM, Micklethwaite S, Thiele ST, Vollgger SA, Cruden AR. Review of drones, photogrammetry and emerging sensor technology for the study of dykes: Best practises and future potential.
J. Volcanol. Geotherm. Res. 2019,
373, 148–166.
[Google Scholar]
-
90.
Zourmand A, Kun Hing AL, Wai Hung C, AbdulRehman M. Internet of Things (IoT) using LoRa technology. In Proceedings of the 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 29 June 2019.
-
91.
-
92.
Park S, Kim HT, Lee S, Joo H, Kim H. Survey on Anti-Drone Systems: Components, Designs, and Challenges.
IEEE Access 2021,
9, 42635–42659.
[Google Scholar]
-
93.
-
94.
Alvear O, Calafate CT, Zema NR, Natalizio E, Hernández-Orallo E, Cano JC, et al. Ten questions concerning the use of drones in urban environments.
Build. Environ. 2020,
167, 106458.
[Google Scholar]
-
95.
Kellermann R, Biehle T, Fischer L. Drones for parcel and passenger transportation: A literature review.
Transp. Res. Interdiscip. Perspect. 2020,
4, 100088.
[Google Scholar]
-
96.
Javaid M, Khan IH, Singh RP, Rab S, Suman R. Exploring contributions of drones towards Industry 4.0.
Ind. Robot Int. J. Robot. Res. Appl. 2021,
49, 476–490.
[Google Scholar]
-
97.
Campi T, Dionisi F, Cruciani S, De Santis V, Feliziani M, Maradei F. Magnetic field levels in drones equipped with Wireless Power Transfer technology. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 18–21 May 2016.
-
98.
-
99.
-
100.
Kreps SE. Drones: What Everyone Needs to Know; Oxford University Press: Oxford, UK, 2016.
-
101.
Burgués J, Marco S. Environmental chemical sensing using small drones: A review.
Sci. Total Environ. 2020,
748, 141172.
[Google Scholar]
-
102.
Kumar A, Augusto de Jesus Pacheco D, Kaushik K, Rodrigues JJPC. Futuristic view of the Internet of Quantum Drones: Review, challenges and research agenda.
Veh. Commun. 2022,
36, 100487.
[Google Scholar]
-
103.
Nouacer R, Hussein M, Espinoza H, Ouhammou Y, Ladeira M, Castiñeira R. Towards a framework of key technologies for drones.
Microprocess. Microsyst. 2020,
77, 103142.
[Google Scholar]
-
104.
Nayyar A, Nguyen B-L, Nguyen NG. The Internet of Drone Things (IoDT): Future Envision of Smart Drones. In First International Conference on Sustainable Technologies for Computational Intelligence; Springer: Singapore, 2020.
-
105.
Berkowitz R. Drones and the Question of ‘The Human’.
Ethics Int. Aff. 2014,
28, 159–169.
[Google Scholar]
-
106.
Hawkins TG. Studies and Research Regarding Sound Reduction Materials with the Purpose of Reducing Sound Pollution; California Polytechnic State University: San Luis Obispo, CA, USA, 2014.
-
107.
Mahadevan P. The Military Utility of Drones. CSS Anal. Secur. Policy 2010. doi:10.3929/ETHZ-A-006253833.
 Anirban Middey
1,3
Anirban Middey
1,3