Nonholonomic wheeled mobile robot (NWMR) is a typical nonlinear control system subject to nonholonomic constraints. It has been widely applied in daily life, scientific research and engineering [
1]. Since the stabilization of a NWMR is an important topic, then there have been fruitful results [
2,
3,
4,
5]. It should be pointed out that many of the existing results stabilize the NWMR asymptotically, which implies that the closed-loop system has an infinite settling time. However, for accomplishing specific tasks within a limited timeframe, finite settling time is preferred. Therefore, finite-time control is more suitable for practical applications. Lots of methods have been used to address the finite-time control problems, such as the sliding mode control method [
6,
7,
8], the homogeneity method [
9,
10] and the backstepping method [
11]. In addition, these methods have been applied in various systems, including quadrotors [
12], spacecraft [
6], brushless DC (BLDC) motors [
13], and industrial robots [
14]. Due to the nonholonomic constraints of the mobile robot, only limited results have been achieved in finite-time stabilization for the NWMR [
15,
16,
17]. It is noteworthy that many of these results address finite-time stabilization without considering input constraints.
Input constraints are critical factors in controller design. Ignoring these constraints during the controller design can result in degraded or even deteriorated control performance. Therefore, it is imperative to design controllers considering input constraints. Most importantly, addressing the finite-time control problem while considering input constraints is challenging. For NWMR stabilization, a switching strategy has been employed in [
18], introducing state and input transformations to decouple the original system into a first-order integrator system and a second-order integrator system. However, when input constraints are considered, the input transformation makes it difficult to determine whether the original inputs exceed the allowable limits. To address this issue, this paper proposes a bounded finite-time controller for NWMR stabilization without introducing input transformation.
Based on the above clarifications, the main contributions of this paper are summarized as follows:
(1) Bounded finite-time controllers are proposed, using the hyperbolic tangent function tanh(·), to stabilize the mobile robot and the upper-bound estimate for the closed-loop settling time is given explicitly. In addition, the level of the input constraints is given by parameters selected according to the actuator’s capacity.
(2) For the proposed bounded finite-time controllers, a compact set contained in the domain of attraction is explicitly characterized, and a step-by-step guideline is provided for constructing this compact set.
The remainder of this paper is organized as follows. In Section 2, some useful lemmas are recalled and the problem formulation is conducted. Section 3 presents the main results. Section 4 presents the simulation results to validate the effectiveness of the proposed controllers. Section 5 concludes the paper.
Consider a general system defined by
where $$x \in \mathbb{R}^{n}$$ is the system state,
f:
D→
Rn represents a continuous nonlinear function on an open neighborhood $$D \subset \mathbb{R}^{n}$$ of the origin and $$f \left(0\right) = 0$$.
In this section, some important lemmas are recalled and the problem formulation is conducted, which will facilitate the derivation of the main results.
2.1. Some Useful Lemmas
Lemma 1. [
19] For a system (1), if there exists a continuous positive definite function
V:
D→
R on an open neighborhood $$U\subset D$$ of the origin and real numbers $$c>0,\rho\in\begin{pmatrix}0,1\end{pmatrix}$$ such that $$\dot{V}(x)+cV^{\rho}(x)\leq0,x\in U\backslash\{0\}$$, then the origin of the system (1) is finite-time stable and the settling time can be estimated as $$T\left(x_0\right)\le V^{1-\rho}\left(x_0\right)/c\left(1-\rho\right)$$ for a given initial condition $$x_0\in U$$, where $$T(x_0)$$ is the settling time function.
Lemma 2. [
20] If $$0<\lambda=\lambda_1/\lambda_2\le1$$ and both $$\lambda_1,\lambda_2$$ are positive odd integers, then the following inequality holds:
Lemma 3. [
21] For any $$x\in\mathbb{R},y\in\mathbb{R},c,d$$ are positive real numbers and $$\Lambda(x,y)>0$$ is a real-valued function, the following inequality can be obtained
Lemma 4. [
22,
23] For any number $$r>0$$, when $$\left|x\right|\le r$$, the following inequality holds:
where $$k_{2}>0$$ is a constant.
Lemma 5. [
24] If $$x_i \in R, i =1,2,…n$$ and $$0<\lambda\leq1$$ is a real number, then the following inequality holds:
2.2. Problem Formulation
The kinematics of a mobile robot can be represented as
where $$\begin{pmatrix}x,y\end{pmatrix}$$ represents the coordinate of the center of mass, $$\theta$$ is the robot’s orientation in the global frame,
v and $$\omega$$ are the linear and angular velocities, respectively. It is noteworthy that the kinematic model (2) is quite common in real-world applications and can often be found in the control of Automated Guided Vehicles (AGVs) and robot vacuum cleaners.
It can be seen from (2) that there exists the following nonholonomic constraint:
This nonholonomic constraint reflects the limitation of the robot’s freedom of motion: the robot can only move along its heading direction and cannot slide laterally.
In this paper, considering control input constraints, the control objective is to design bounded controllers
v and $$\omega$$ to stabilize (2) within finite time. In addition, provide an explicit upper-bound estimate for the closed-loop settling time and ensure that the saturation level of the control inputs can be predefined based on the actuator’s capacity. Finally, offers a guideline for constructing a compact set contained in the domain of attraction.
In this section, a bounded finite-time control scheme is proposed to stabilize the mobile robot. Before designing the controllers
v and $$\omega$$, a classical transformation is introduced as follows:
Under this transformation (3), the mobile robot system (2) can be written as
where $$z_1,z_2,z_3$$ are the system states, $$\omega$$ and
v are the control inputs. It can be seen that through (3) the mobile robot (2) is decoupled into a first-order subsystem
S1 and a second-order subsystem
S2. Inspired by [
18], a switching strategy is used here. Specifically, to achieve the finite-time stabilization of the mobile robot, one needs to finish the following two steps:
(1) Set $$\omega=c$$, where
c is a non-zero constant. Then (4) can be represented as
where $$\overline{z}_3=cz_3$$. One needs to design a bounded controller
v to stabilize $$\bar{S}_2$$ within a finite time $$T_1(z_2(0),\bar{z}_3(0))$$.
(2) When $$t>T_1\left(z_2(0),\bar{z}_3(0)\right)$$, the second-order subsystem $$\bar{S}_2$$ has been stabilized at the origin,
i.e., $$z_2=\overline{z}_3=0\Rightarrow z_2=z_3=0$$. Then, at this instant, one needs to use a bounded finite-time controller $$\omega$$ to stabilize the first-order subsystem
S1.
From the analysis of the above two steps, design switching controllers as
where $$k_{\omega1},k_{\nu1}$$ are positive constants, and
c is a non-zero constant, and
m,
n are positive odd constants satisfying
m <
n. 1 <
p =
p1/
p2 < 2 and both $$p_{1}$$ and $$p_{2}$$ are positive odd integers satisfying $$p_1>p_2$$, and $$k_{\omega2},k_{\nu2},k_{\nu3}$$ are appropriate positive constants. Without any ambiguity, we use $$\left(\cdot\right)^p$$ for simplicity instead of $$\left|\cdot\right|^p\operatorname{sign}(\cdot)$$, where $$p=p_1/p_2$$.
Before presenting the main results, Lemma 6 and Lemma 7 are given as follows.
Lemma 6. For the subsystem $$\bar{S}_2$$ in (5), if the initial states $$\left(z_2(0),\bar{z}_3(0)\right)\in\Omega_\beta$$, where $$\Omega_{\beta}$$ is a given compact set, then $$\bar{S}_2$$ can be finite-time stabilized by the bounded controller (7) at the origin. The controller parameters $$k_{v1}$$, $$k_{v2}$$ and $$k_{v3}$$ satisfy.
where
E is a given positive constant, and
r is a positive constant satisfying $$r\leq k_{\nu3}^pE$$, and $$k_{\nu1}>c^2E$$, and the control input is bounded by
Proof. The proof is divided into three steps. In the first two steps, the time derivative of the Lyapunov function is given. In Step 3, the finite-time stability of the closed-loop system $$\bar{S}_2$$ and (7) is proved in the given domain $$\Omega_{\beta}$$.
Step 1: Substituting controller (7) into $$\bar{S}_2$$ in (5) derives that
Choose an appropriate Lyapunov function
V as
Taking the time derivative of
V0 and using $$\bar{z}_3^∗=-k_{\nu3}z_2^\frac{1}{p}$$ derive
From Lemma 2, for the term |$$\bar{z}_3-\bar{z}_3^∗$$|, it can be derived that
Denote $$\overline{z}_{3}^{p}-\overline{z}_{3}^{∗p}=\overline{z}_{3}^{p}+k_{\nu3}^{p}z_{2}=\zeta$$, and then (13) can be written as
For the term $$\left|z_2\right|\left|\zeta\right|^\frac{1}{p}$$, from Lemma 3, it can be obtained
Then $$\dot{V}_0$$ can be derived as
Step 2: Taking the time derivative of
V1 derives
Invoking (14), it is noted that
Then, substituting $$\dot{\bar{z}}_3$$ in (11) into (16) derives
where $$\overline{z}_3^p+k_{\nu3}^pz_2=\overline{z}_3^p-\overline{z}_3^{∗p}=\zeta$$ has been used.
For the term $$|\bar{z}_3||\zeta|$$, from (14) and Lemma 3, it can be derived that
For the term $$-c^2\zeta^{2-\frac{1}{p}}z_2$$, from Lemma 3, it can be derived that
From (17) and (18) and the fact $$|\zeta|^{1+\frac{1}{p}}=|\zeta|^{\frac{p_{1}+p_{2}}{p_{1}}}=\zeta^{\frac{p_{1}+p_{2}}{p_{1}}}=\zeta^{1+\frac{1}{p}}$$, then $$\dot{V}_{1}$$ can be written as
Step 3: In view of Lemma 4, we consider
where
r is selected to satisfy $$r\leq k_{\nu3}^pE$$. In terms of (20), denote a domain containing the origin by
Choose a set as
$$B_r\subset D$$ is obvious from the fact $$\left|\bar{z}_3^p+k_{v3}^pz_2\right|\leq|\bar{z}_3|^p+k_{v3}^p|z_2|\leq r$$. Let $$\alpha = \underset{\left|\overset{-}{z}_{3}\right|^{p} + k_{v 3}^{p} \left|z_{2}\right| = r}{\mathrm{min}} V > 0$$, where $$r\leq k_{\nu3}^pE$$ to ensure that $$|z_2|\leq E$$. Take $$\beta\in\begin{pmatrix}0,\alpha\end{pmatrix}$$ and let
Thus, it can be inferred that the set $$\Omega_{\beta}$$ is a compact set and $$\Omega_{\beta} \subset B_{r} \subset D$$.
By Lemma 4, for the states in the domain $$D$$, the following inequality holds:
In addition, for the states in the domain $$B_{r}$$, it can be known that $$\left|z_{2}\right| \leq E$$.
From (15), (19), (21), and $$\left|z_{2}\right| \leq E$$, the time derivative $$\overset{\cdot}{V}$$ can be written as
Denote
Invoking conditions (8) and (9), it can be known that $$\varphi_{0} , \varphi_{1} > 0$$ always holds.
Recalling (12), it can be derived that
In view of (23) and Lemma 5, the inequality (22) can be further represented as
where
Invoking Lemma 1, it can be derived that the settling time of the subsystem $$\overline{S}_{2}$$ can be estimated as
From the definition of $$\Omega_{\beta}$$, the relation $$\Omega_{\beta} \subset B_{r} \subset D$$ and (24), it can be known that $$\Omega_{\beta}$$ is a positively invariant set. Choose $$\Omega_{\beta}$$ as the compact set where the initial states are included. Then, from Lemma 1, it can be proved that $$\overline{S}_{2}$$ under (7) is finite-time stable at the origin. Due to the boundedness of tanh(·), the control input
v satisfies (10). □
Remark 1. A systematic procedure for selecting the controller parameters in (7) and constructing the compact set $$\Omega_{\beta}$$ is presented as follows:
(1) Set the constant value $$c$$. Choose a constant $$E$$ in $$\left|z_{2}\right| \leq E$$. It is obvious that $$E$$ represents a range in which the user desires the state $$z_{2}$$ locates.
(2) Based on the actuator’s capacity, select a value for $$k_{v 1}$$ satisfying $$k_{v 1} > c^{2} E$$ such that the control action could be large enough to counteract the effect of $$- c^{2} z_{2}$$ in (5).
(3) Choose appropriate parameters $$k_{v 3}$$ and $$p$$ satisfying (8).
(4) Select a large enough $$k_{v 2}$$ and an appropriate $$r$$ satisfying (9) and $$r \leq k_{v 3}^{p} E$$.
(5) Once $$k_{v 3} , p$$ and $$r$$ are selected, the set $$D$$ and $$B_{r}$$, in the proof of Lemma 6, are determined. Then, calculate $$\alpha$$ and choose $$\beta \in \left(0 , \alpha\right)$$. Finally, one can construct the compact set $$\Omega_{\beta}$$.
After the subsystem $$\overline{S}_{2}$$ has been stabilized at the origin, select the switching time as
When $$t>T_1(z_2(0),\bar{z}_3(0))$$, it is time to prove that the first-order subsystem
S1, under the bounded controller $$\omega$$, is finite-time stable at the origin. Actually, this problem,
i.e., the first-order finite-time stabilization problem considering input constraints, has been addressed in our previous result [
23]. Thus, the following lemma are presented here and the detailed proof can be found in [
23].
Lemma 7. For the first-order subsystem
S1 in (4), design the control input as
Then the subsystem $$S_{1}$$ with (26) is globally finite-time stable at the origin and the settling time function $$T_{s 1}$$ is bounded by
where $$z_{10}$$ represents the initial value of $$z_{1}$$, and $$V_{z 1} = z_{1}^{2}$$, and $$k_{\omega 2}$$ and $$\overline{r}$$ are defined in Lemma 4. In addition, the control input is bounded by
Based on Lemma 6 and Lemma 7, the main results are presented in the following.
Theorem 1. For the mobile robot system (2), under the transformation (3), if the initial states satisfy $$z_1\left(0\right)\in\mathbb{R}$$, $$\left(z_{2}(0),\bar{z}_{3}(0)\right)\in\Omega_{\beta}$$, where $$\overline{z}_3\begin{pmatrix}0\end{pmatrix}=cz_3\begin{pmatrix}0\end{pmatrix}$$,
c is a non-zero constant and $$\Omega_{\beta}$$ is a given compact set, then (2) can be finite-time stabilized by the switching controllers (6) and (7) at the origin and the switching time is given as (25). The settling time function $$T_{2} \left(z_{0}\right)$$ of the closed-loop system (2), (6) and (7) is bounded by
where $$z_0=[z_1(T_1),z_2(0),\bar{z}_3(0)]^T$$. In addition, the control inputs are bounded by
Proof. First, following the same line as the proof of Lemma 6, it is proved that the subsystem $$\bar{S}_{2}$$ can be finite-time stabilized by the bounded controller (7) at the origin and the upper-bound estimate for the settling time of the subsystem $$\bar{S}_{2}$$, denoted as $$T_{1}$$, can be provided explicitly. Then, select $$T_{1}$$ as the switching time. For the subsystem $$S_{1}$$, since $$\overset{\cdot}{z}_{1} = c$$, when $$t \leq T_{1}$$, there is no finite-time escape phenomenon. Next, invoking Lemma 7 originating from [
23], it can be proved that the subsystem $$S_{1}$$ can be globally finite-time stabilized by (6) at the origin. It is noted that $$z_{10} = z_{1} \left(T_{1}\right) = z_{1} \left(0\right) + c T_{1}$$ and thus the settling time function $$T_{2}$$ is bounded by (27). Under the transformation (3), it is obvious that $$z_{1} = z_{2} = z_{3} = 0 \Rightarrow x = y = \theta = 0$$. In addition, it can be easily checked that the control inputs are bounded by (28). □
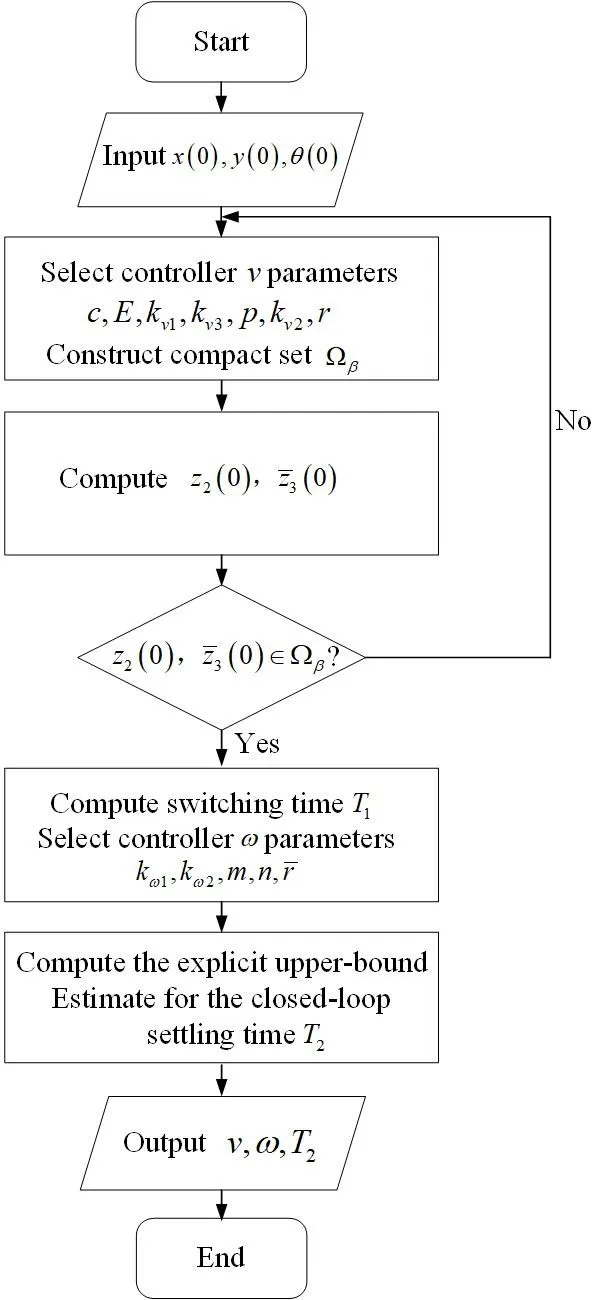
To help understand how to implement the control algorithm in a NWMR, the pseudocode and schematic are provided below in Algorithm 1 and , respectively:
Algorithm 1: Finite-Time Stabilization of a NWMR With Input Constraints |
1 |
Input the initial states $$x \left(0\right) , y \left(0\right) , \theta \left(0\right)$$; |
2 |
Based on the guideline in Remark 1 and the actuator’s capacity, select a set of controller parameters related to controller (7): $$c,E,k_{\nu1},k_{\nu3},p,k_{\nu2},r$$ and construct the given compact set $$\Omega_{\beta}$$; |
3 |
From $$x (0) , y (0) , \theta (0) , c ,$$ Equation (3) and $$\overset{-}{z}_{3} = c z_{3}$$, compute $$z_{2} (0)$$ and $$\overset{-}{z}_{3} (0)$$; |
4 |
If $$\left(z_{2} (0) , \overset{-}{z}_{3} (0)\right) \in \Omega_{\beta}$$, go to 5. Otherwise, go back to 2 to adjust the controller parameters; |
5 |
From (25), compute the switching time $$T_{1}$$, and then select the controller parameters $$k_{\omega1},k_{\omega2},m,n,\overset{-}{r}$$; |
6 |
From (27), compute the explicit upper-bound estimate for the closed-loop settling time; |
7 |
Output the controller $$v , \omega$$ and the closed-loop settling time $$T_{2}$$. |
. The schematic of the proposed algorithm.
From Lemma 6, Lemma 7, and Theorem 1, it is evident that the finite-time stabilization of a NWMR with input constraints involves two steps. In the first step, based on a constant controller $$\omega = c$$, one needs to design a bounded finite-time controller $$v$$ to stabilize the second-order subsystem $$\bar{S}_{2}$$ in (5), while also computing the upper-bound estimate of the settling time for subsystem $$\bar{S}_{2}$$ under controller (7). In the second step, the upper-bound estimate obtained in the first step is selected as the switching time. Subsequently, a bounded finite-time controller $$\omega$$ is designed to stabilize the first-order system $$S_{1}$$ in (4). Through these two steps, an explicit upper-bound estimate of the closed-loop settling time is derived, as shown in (27). Furthermore, due to the boundedness of tanh(·), the controllers $$\omega , v$$ can be bounded by the controller parameters, as described in (28), which are selected in advance based on the actuator’s capacity. It is important to note that the upper-bound estimate of the settling time for the subsystem $$\bar{S}_{2}$$ under (7) is relatively conservative. As a result, the switching time is also conservative. Therefore, reducing this conservatism will be a key focus of future research.
In this section, for the proposed bounded finite-time switching controllers (6) and (7), the simulation results are presented to validate their effectiveness. In addition, our method is compared with the switching method in [
18], which has been wildly used in recent studies on nonholonomic systems [
25,
26,
27,
28].
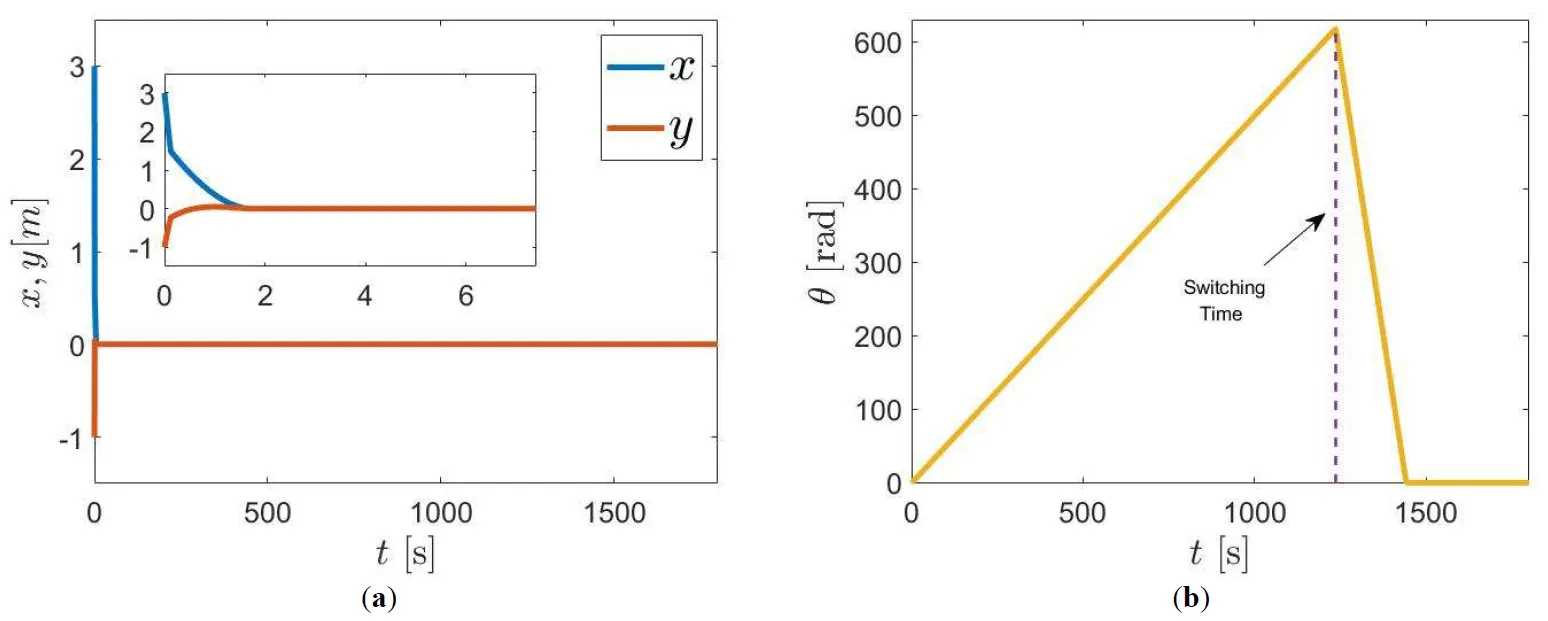
For a fair comparison, the initial conditions are set as $$\left[x \left(0\right) , y \left(0\right) , \theta \left(0\right)\right]^{T} = \left[3 , - 1 , - 0 . 5\right]^{T}$$. Here, for our controllers (6) and (7), we choose the controller parameters as $$c=0.5,E=1,k_{\omega1}=3,k_{\omega2}=1,m=1,n=3,\bar{r}=620$$, $$k_{v1}=7,k_{v2}=10,k_{v3}=1.245,p=27/17,r=1$$. From (25), the switching time is calculated as $$T_1\left(z_2(0),\bar{z}_3(0)\right)=1236.1s$$. In addition, from Step 3 in the proof of Lemma 6, it can be obtained that $$\alpha = 0.0343$$. Then we choose $$\beta = 0.034$$. It can be checked that the initial conditions are included in the given compact set $$\Omega_{\beta}$$. The responses of the states $$x, y$$ and $$\theta$$ are shown in a,b, respectively. The control inputs $$\omega$$ and $$v$$ are shown in .
. State trajectories of the mobile robot using the proposed algorithm. (<b>a</b>) State trajectories <i>x</i> and <i>y</i>; (<b>b</b>) State trajectories $$\theta$$.
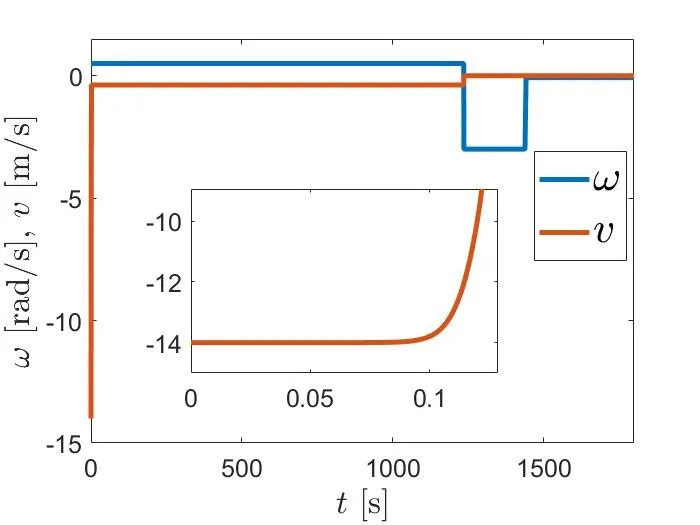
From a,b, it can be seen that the state trajectories $$x , y$$ converge to zero at about $$2 s$$ and $$\theta$$ converges to zero at about $$1440 s$$. It is evident that all states converge to zero in finite time. In addition, from (27), it can be computed that the upper-bound estimate of the closed-loop settling time is $$1545 . 2828 s$$. It should be noted that, before the switching time $$T_{1} \left(z_{0}\right)$$, since $$\omega$$ is a non-zero constant $$c$$, the value of $$\left|\theta\right|$$ increases continuously. When $$t > T_{1} \left(z_{0}\right)$$, the angle $$\theta$$ is stabilized by the controller (6) in a finite time. From , invoking (28), it can be seen that the control inputs are bounded by the prescribed parameters,
i.e., $$\left|\omega\right| \leq 3$$ rad/s and $$\left|v\right| \leq 14$$ m/s.
. Stabilization inputs $$\omega$$ and <i>v</i>.
Using the switching method in [
18], for the nonholonomic system (2), introduce the following state transformation and input transformation:
where the subscript
D denotes the corresponding variables from Defoort’s paper [
18], distinguishing them from the related variables used in this paper.
Under this transformation (29), the mobile robot system (2) can be written as
Design a controller as
```latex\begin{aligned}&v_{1D}=\begin{cases}\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,c,t\leq T_{1D},\\-\alpha_3|z_{1D}|^2\mathrm{sign}(z_{1D})-\beta_3\mathrm{sign}(z_{1D}),t>T_{1D},&&\end{cases}\\&v_{2D}=\begin{cases}-\frac{\alpha_1+3\beta_1z_{2D}^2}{2c}\operatorname{sign}(s)-\frac{|\alpha_2s+\beta_2|s|^3\operatorname{sign}(s)|^\frac{1}{2}\operatorname{sign}(\alpha_2s+\beta_2|s|^3\operatorname{sign}(s))}{c},&t\leq T_{1D},\\\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,0,t> T_{1D},&&\end{cases}\end{aligned}```
where $$s=cz_{3D}+||cz_{3D}|^2\mathrm{sign}(cz_{3D})+\alpha_1z_{2D}+\beta_1|z_{2D}|^3\mathrm{sign}(z_{2D})|^\frac{1}{2}\mathrm{sign}\left(|cz_{3D}|^2\mathrm{sign}(cz_{3D})+\alpha_1z_{2D}+\beta_1|z_{2D}|^3\mathrm{sign}(z_{2D})\right)$$.
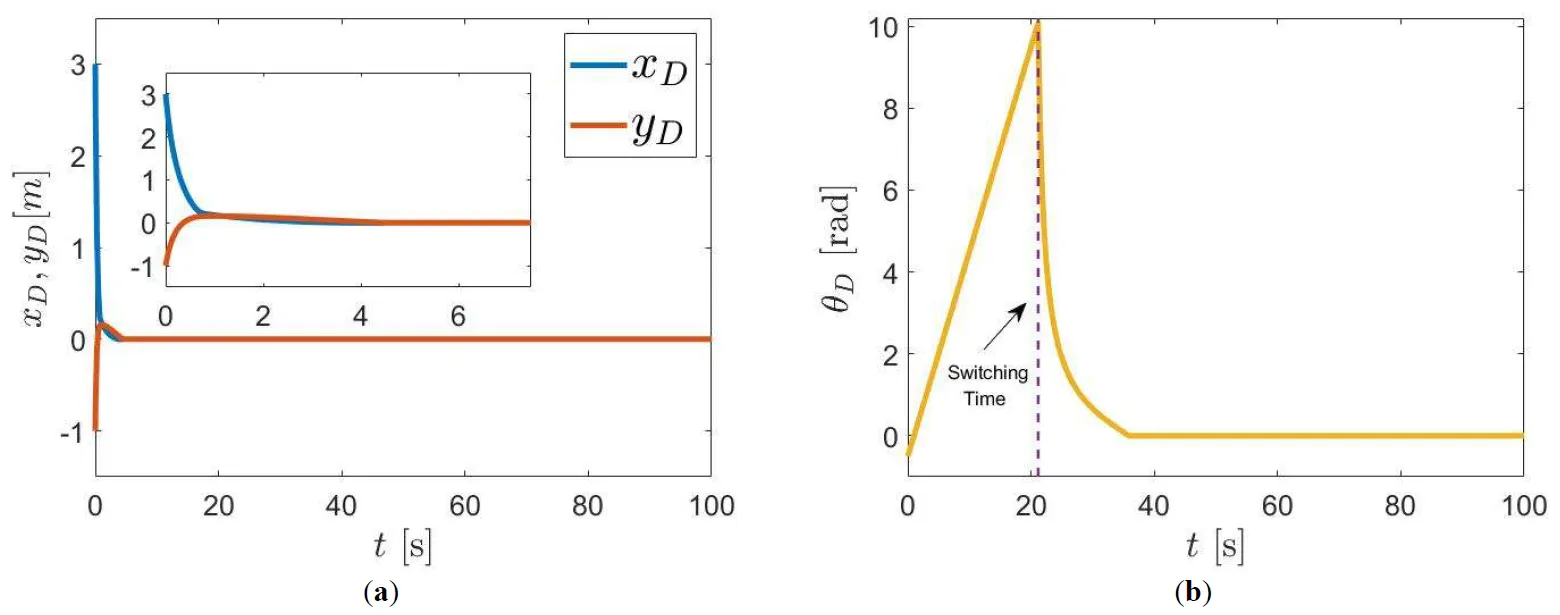
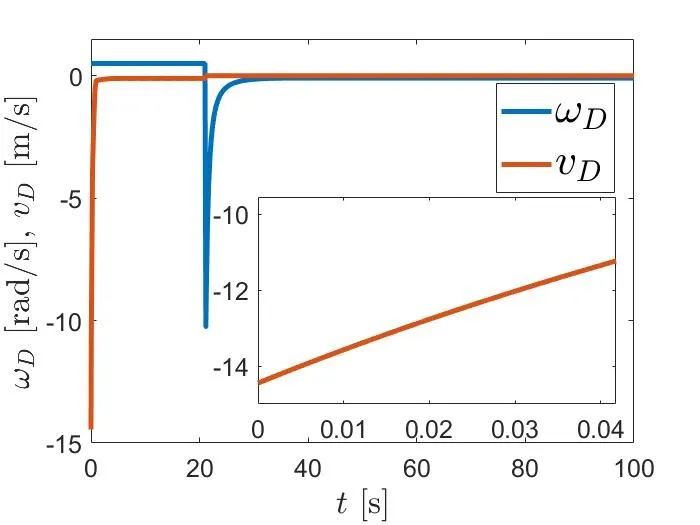
We choose the controller parameters as $$c = 0 . 5 , \alpha_{1} = \beta_{1} = 0 . 1 , \alpha_{2} = \beta_{2} = 1 . 5 , \alpha_{3} = \beta_{3} = 0 . 1$$, and then from $$T_{1 D} = \frac{2}{\sqrt{\alpha_{2}}} + \frac{2}{\sqrt{\beta_{2}}} + \frac{2 \sqrt{2}}{\sqrt{\alpha_{1}}} + \frac{2 \sqrt{2}}{\sqrt{\beta_{1}}}$$, the switching time is computed as $$T_{1 D} = 21 . 1545 s$$. The responses of the states $$x_{D} , y_{D}$$ and $$\theta_{D}$$ are shown in a,b, respectively. The control inputs $$\omega_{D}$$ and $$v_{D}$$ are shown in .
. State trajectories of the mobile robot using the method in [
18]. (<b>a</b>) State trajectories $$x_D$$ and $$y_D$$; (<b>b</b>) State trajectories $$\theta_D$$.
. Stabilization inputs $$\omega_D$$ and $$v_D$$.
By comparing and , it is evident that the control inputs $$\omega$$ and $$v$$, in this paper, are bounded by (28), with computed values $$\left|\omega\right| \leq 3$$ rad/s and $$\left|v\right| \leq 14$$ m/s. However, for the same initial states, since the method in [
18] does not account for input constraints, the input signals $$\omega_{D}$$ and $$v_{D}$$ exceed $$3$$ rad/s and $$14$$ m/s, respectively, and even $$\left|\omega_{D}\right| > 10$$ rad/s. In practice, excessive input values that exceed the actuator’s limits can potentially damage the actuator. Therefore, it is crucial to consider input constraints in control design. It is important to note that this comparison focuses solely on whether the constraint level of the control input can be pre-defined by parameters, and whether the designed controllers can be bounded by these predefined values. Thus, the comparison above demonstrates the validity of the proposed algorithm in this paper. In addition, from b and b, it is clear that the switching time in this paper is significantly longer than that in [
18]. Consequently, achieving finite-time stabilization of a NWMR with input constraints while reducing the switching time remains a key direction for our future research.
In this paper, the finite-time stabilization control problem for a nonholonomic wheeled mobile robot with input constraints is addressed. Specifically, based on the bounded odd function tanh(·), bounded finite-time controllers are proposed to stabilize the mobile robot. In addition, the upper-bound estimate for the closed-loop settling time is provided explicitly and the level of input constraint is presented by parameters dependent on actuator’s capacity. Using appropriate Lyapunov functions, a comprehensive finite-time stability analysis is conducted. Moreover, a guideline is provided to clarify how to choose the controller parameters and construct a compact set contained in the domain of attraction. Finally, the effectiveness of the proposed controllers is validated through simulation results.
The authors wish to thank the associate editor and reviewers who made some valuable suggestions to improve the paper significantly.
Conceptualization and Methodology, X.L. and Z.Z.; Software and Validation, X.L.; Writing—Original Draft Preparation, X.L.; Writing—Review & Editing, Z.Z.
Not Applicable.
Not Applicable.
This work was supported by the National Natural Science Foundation of China (No. 62473020).
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.