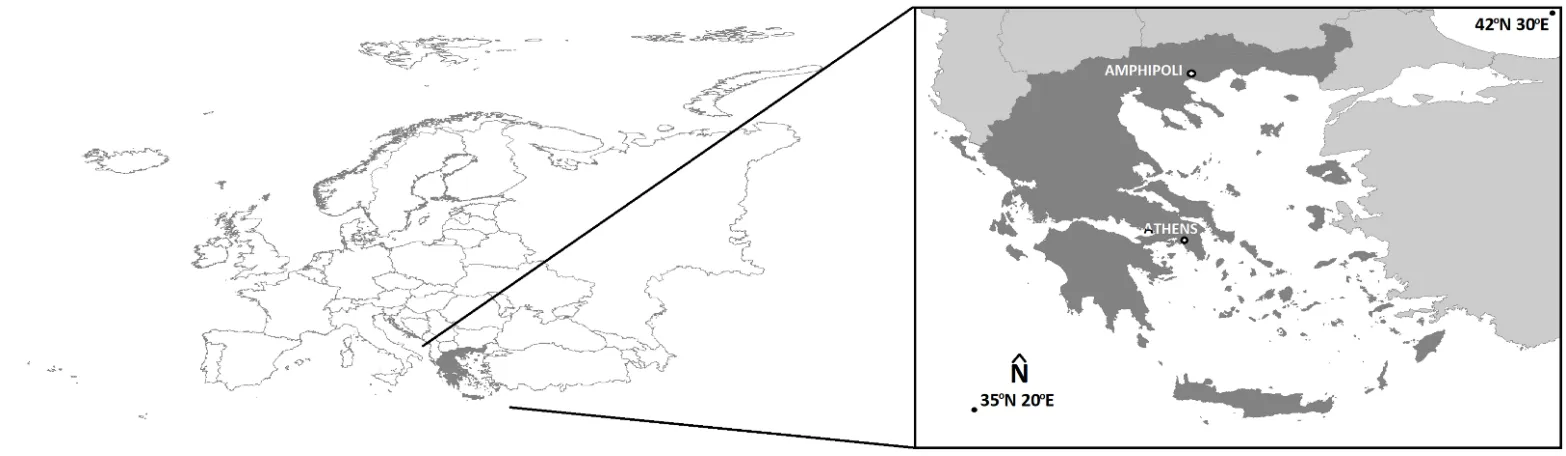
In this paper, image fusion is performed by utilizing images derived from different cameras for the unmanned aerial vehicle (UAV). By producing the fused image, the spatial resolution of the multispectral (MS) image is improved on the one hand and the classification accuracy on the other hand. First, however, the horizontal and vertical accuracy of the generated products, orthophoto mosaics, and digital surface models, is determined using checkpoints that do not participate in the processing of the image blocks. Also, the changes of these accuracies with a 50% increase (or decrease) of the UAV's flight height are determined. The study area is the Early Christian Basilica C and the flanking Roman buildings, at the archaeological site of Amphipolis (Eastern Macedonia, Greece).
In recent years, the use of Unmanned Aerial Systems (UAS) to obtain imagery for photogrammetry has become commonplace. Using these data to develop 3D products has also grown significantly in both research and commercial applications. This study aims to find a relatively simple and low cost UAS flight method as a means to obtain data to produce a 3D model suitable for 3D printing. The study subject chosen to assess different flight methods was the Caddo House at Caddo Mounds State Historical Site located near Alto, Cherokee County, Texas, USA. To collect images for analysis, a DJI Phantom 4 Pro UAS was used with Pix4DCapture mission control app. Two main missions were carried out, one being a pre-defined double-grid flight, and the other being an orbital free-flight method. The findings of this study indicate that if the goal is to create a true-to-life 3D model of an object using UAS, the best method would be a curated orbital free-flight method. If there is time constraint and the subject is sufficiently large and not considerably irregular, a double-grid mission with sufficient forward and side overlap can produce desirable results, but with a slight loss of fine details. The 3D model developed from the curated orbital flight method was successfully printed with a customer grade FDM 3D printer.

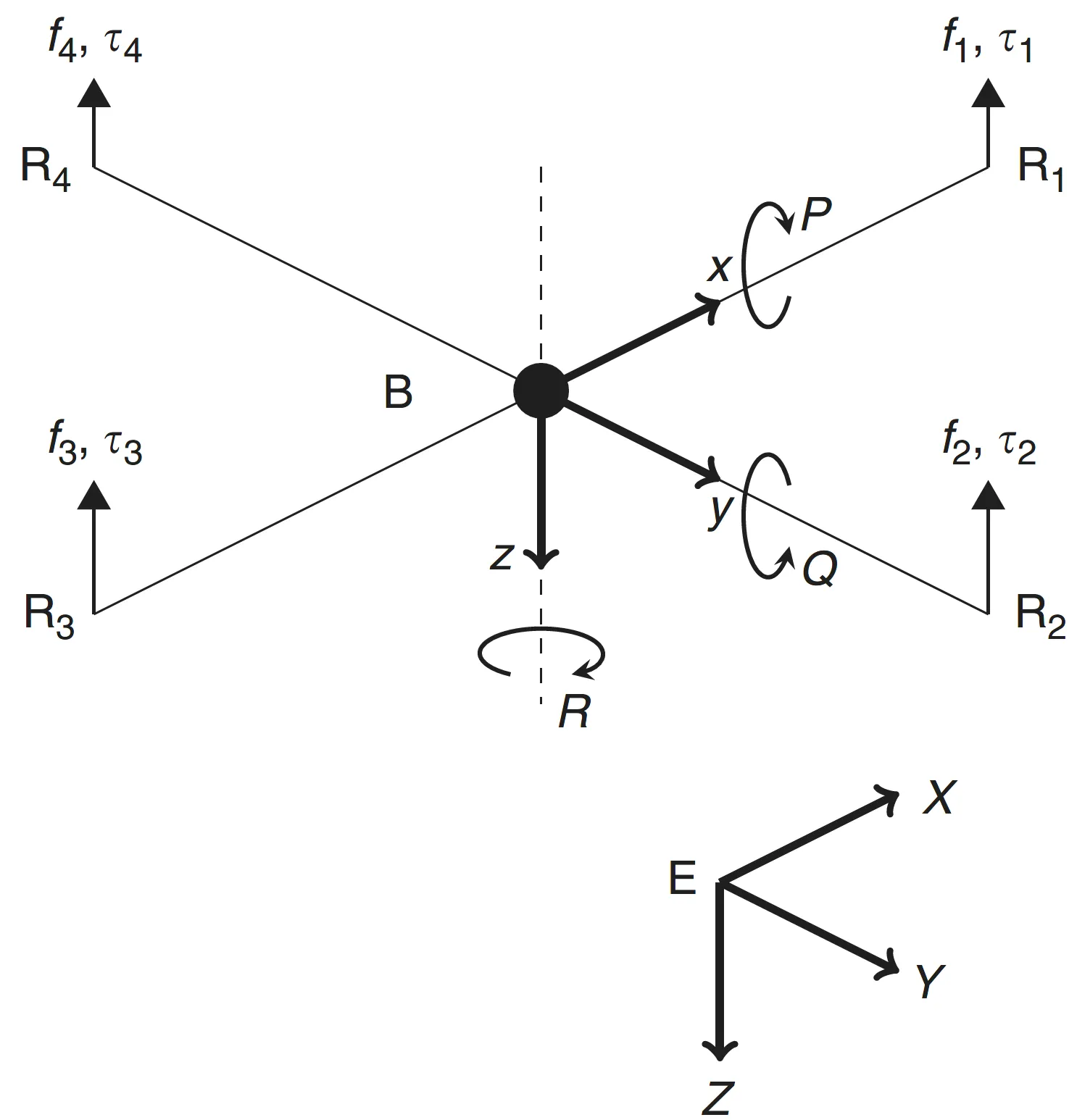
This paper presents a method for fault tolerant control of quadrotor UAVs in case of inversion of the torque direction, a situation that might occur due to structural, hardware or software issues. The proposed design is based on multiple-model ℒ1 adaptive control. The controller is composed of a nominal reference model and a set of degraded reference models. The nominal model is that with desired dynamics that are optimal regarding some specific criteria. In a degraded model, the performance criteria are reduced. It is designed to ensure system robustness in the presence of critical failures. The controller is tested in simulations and it is shown that the multiple model ℒ1 adaptive controller stabilizes the system in case of inversion of the control input, while the ℒ1 adaptive controller with a single nominal model fails.
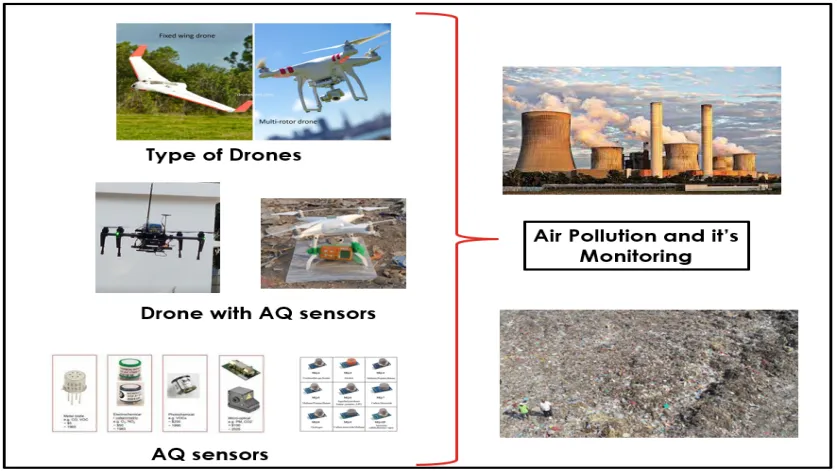
Drone-aided systems have gained popularity in the last few decades due to their stability in various commercial sectors and military applications. The conventional ambient air quality monitoring stations (AAQMS) are immovable and big. This drawback has been significantly overcome by drone-aided low-cost sensor (LCS) modules. As a result, much research work, media information, and technical notes have been released on drone-aided air quality and ecological monitoring and mapping applications. This work is a sincere effort to provide a comprehensive and structured review of commercial drone applications for air quality and environmental monitoring. The collected scientific and non-scientific information was divided according to the different drone models, sensor types, and payload weights. The payload component is very critical in stablility of the multirotor drones. Most study projects installed inexpensive sensors on drones according to the avilibility of the space on drone frame. After reviewing of multiple environmental applications the common payload range was 0 gm to 4000 gm. The crucial elements are addressed, including their relation to meteorological factors, air isokinetics, propeller-induced downwash, sensor mounting location, ramifications etc. As a result, technical recommendations for AQ monitoring assisted by drones are addressed in the debate part. This work will help researchers and environmentalists choose sensor-specific payloads for drones and mounting locations. Also, it enables advanced methods of monitoring parameters that help policymakers to frame advanced protocols and sensor databases for the environment and ecology.