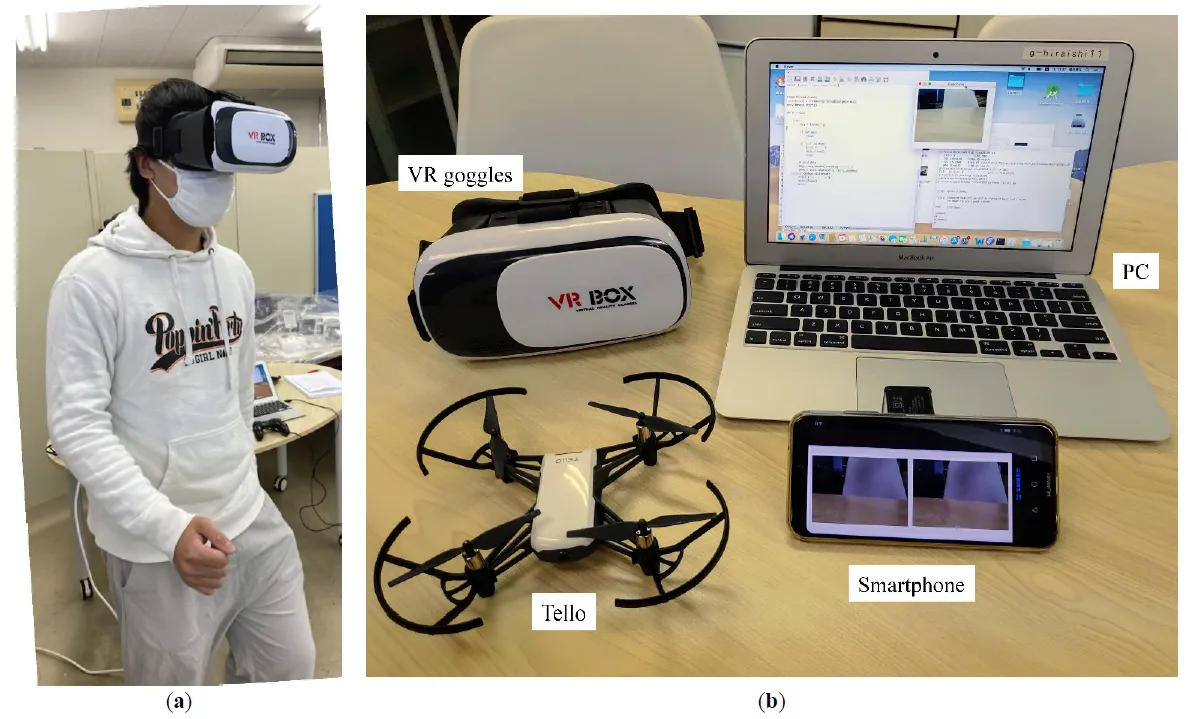
This study proposes a method for operating drones using natural human movements. The operator simply wears virtual reality (VR) goggles. An image from the drone camera was displayed on the goggles. When the operator changes the direction of his or her face, the drone changes the direction to match that of the operator. When the operator moves their head up or down, the drone rises or falls accordingly. When the operator walks in place, rather than walking, the drone moves forward. This allows the operator to control the drone as if they were walking in the air. Each of these movements was detected by the values of the acceleration and magnetic field sensors of the smartphone mounted on the VR goggles. A machine learning method was adopted to distinguish between walking and non-walking movements. Compared with operation via conventional remote control, it was observed that the remote controller performed better than the proposed approach in the early stages. However, when the participants familiarized themselves with the natural operation, these differences became relatively small. This study combined drones, VR, and machine learning. VR provides drone pilots with a sense of realism and immersion, whereas machine learning enables the use of natural movements.
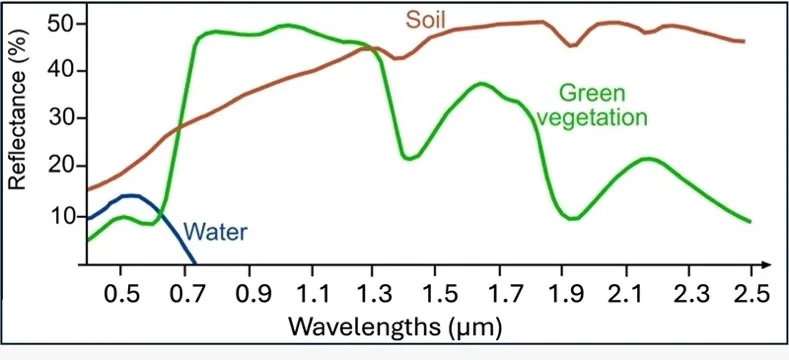
Drones, or unmanned aerial vehicles (UAVs), are increasingly utilized across diverse fields such as agriculture, environmental analysis, and engineering due to their ability to capture high-quality multispectral imagery. To ensure the accuracy of these images, radiometric calibration of onboard multispectral cameras is essential. This study aimed to develop and calibrate a low-cost Lambertian surface using barium sulfate (BaSO4) for radiometric calibration of UAV-mounted multispectral cameras. A stainless steel mold was designed to compact BaSO4, and the resulting surface was calibrated using an ASD FieldSpec HandHeld UV/NIR spectroradiometer and a Spectralon plate as the reference standard. Results showed a strong correlation (Pearson’s r = 0.9988) between the BaSO4 surface and the Spectralon plate, confirming that the BaSO4-based surface is a cost-effective alternative for producing diffuse Lambertian surfaces with performance comparable to the standard.
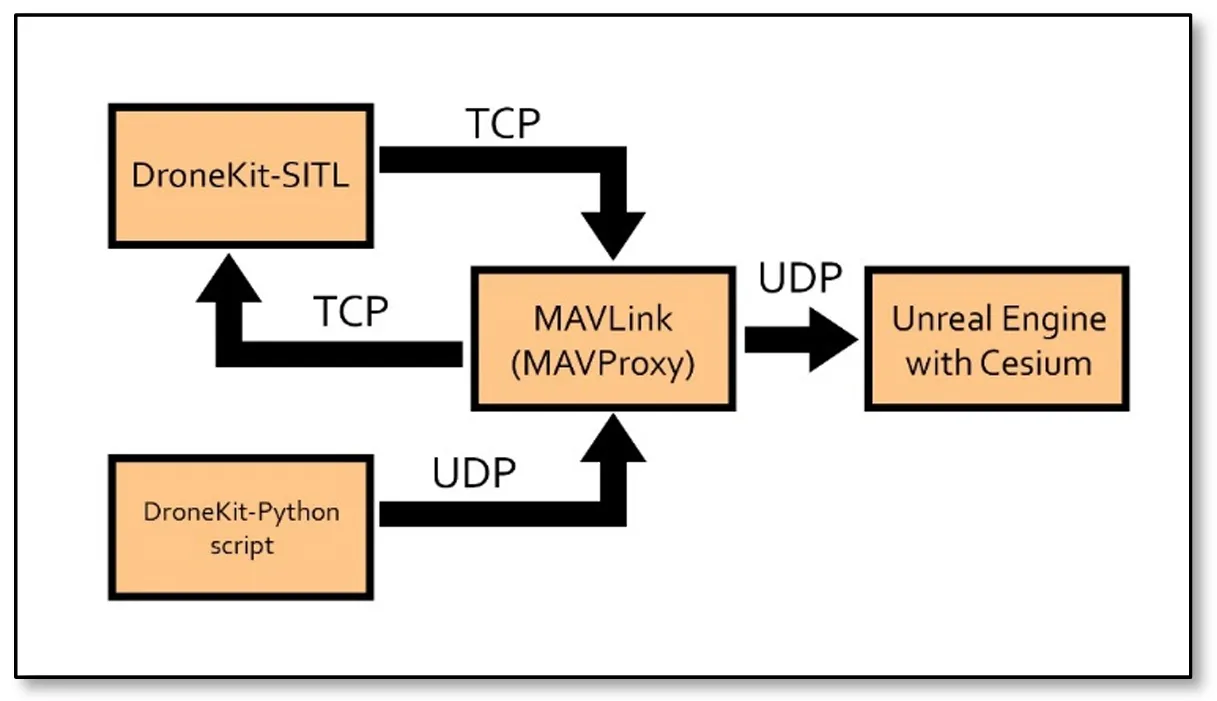
Drone simulation refers to the emulation of Unmanned Aerial Vehicles (UAVs) in a virtual environment, replicating real-world conditions to study and test the behavior, performance, and functionalities of drones. This paper explores the simulation of UAVs in the Unreal Engine environment using MAVProxy (Micro Air Vehicle Proxy) and the Python library DroneKit. By leveraging the computational capabilities of computers, this approach enables precise visualization and control of UAV flight dynamics in three dimensions. The use of Blueprints in Unreal Engine facilitates a cost-effective and accessible simulation process, allowing engineers and scientists to refine their UAV designs before real-world deployment. Results show the applicability of this approach vs. different environments, where an alternative approach also emerges as a viable option for visualizing textured buildings. This approach shows the power of open-source collaboration in advancing innovative solutions in the dynamic field of science and technology.
The quadrotor is an underactuated, nonlinear system that presents significant challenges in both modeling and control design. This work develops a decoupled control framework based on the translational (Newtonian) and rotational (Eulerian) dynamics of the quadrotor. A Linear Quadratic Gaussian (LQG) regulator is implemented for control, with two extended Kalman filters employed for state estimation in the respective dynamic subsystems. The full design process, from dynamic modeling to flight simulation presented in detail. Key elements include nonlinear simulation, model linearization, state-space representation, feedforward compensation, Linear Quadratic Regulator (LQR) gain tuning, actuator dynamics, sensor noise, LQG design, and extended Kalman filter. The limitations of applying linear control to a nonlinear system are also presented.

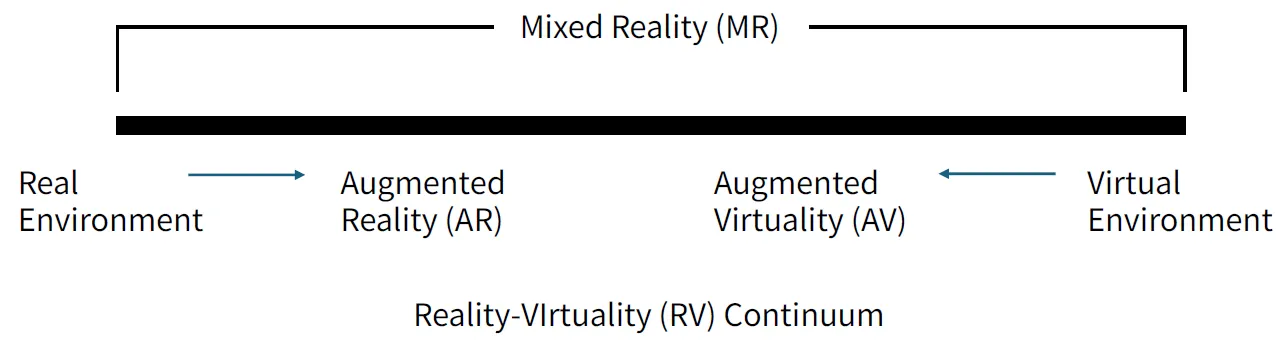
This paper presents a comprehensive survey of Extended Reality (XR)-based drone simulation systems, encompassing their architectures, simulation engines, physics modeling, and diverse training applications. With a particular focus on manual multirotor drone operations, this study highlights how Virtual Reality (VR) and Augmented Reality (AR) are increasingly vital for pilot training and mission rehearsal. We classify these simulators based on their hardware interfaces, spatial computing capabilities, and the integration of game and physics engines. We analyze specific platforms such as Flightmare, AirSim, DroneSim, Inzpire Mixed Reality UAV Simulator, and SimFlight XR are analyzed to illustrate various design strategies, ranging from research-grade modular frameworks to commercial training tools. In this paper, we also examine the implementation of spatial mapping and weather modeling to enhance realism in AR-based simulators. Finally, we identify critical challengesthat remain to be addressed, including user immersion, regulatory alignment, and achieving high levels of physical realism, and propose future directions in which XR-integrated drone training systems can advance.