Urban air quality reflects the combined effects of topography, built form, and emission sources, producing pronounced spatial and temporal variability in pollutant dispersion. This study investigates how urban morphological features-building density, green-space distribution, and transportation corridors-shape these dispersion patterns by deploying unmanned aerial vehicles (UAVs) equipped with Air Quality Index (AQI) sensors. Multi-altitude, high-resolution drone transects were conducted across contrasting urban settings to capture fine-scale pollutant distributions and their dynamics. The measurements reveal localized hotspots and zones of limited dispersion that align with variations in building layout, vegetation presence, and traffic intensity. Compared with fixed-site monitors, the UAV approach resolves vertical and horizontal gradients that are otherwise missed, providing complementary evidence of three-dimensional micro-scale heterogeneity. Taken together, the results indicate that decisions on urban design and infrastructure placement materially influence air-quality outcomes. These findings support the integration of UAV-based observations with conventional monitoring networks to inform targeted mitigation measures, exposure-aware mobility planning, and evidence-based strategies for public health and urban sustainability.

Autonomous drones operating in indoor environments cannot rely on the global positioning system (GPS) signals for precise navigation due to severe signal attenuation and multipath interference in GPS-denied spaces. This paper presents a novel Li-Fi-based optical positioning, and combined with high-sensitivity photodiode sensor arrays, to enable robust drone guidance in challenging indoor environments where conventional radio-frequency localization fails. The proposed system uses strategically distributed ceiling-mounted Light Emitting Diode (LED) luminaires across the operational space, each transmitting unique identification codes through high-frequency light modulation at rates imperceptible to human vision, thereby maintaining dual functionality for simultaneous illumination and positioning. Unlike existing VLC positioning studies that focus on static receivers, our system integrates real-time optical localization directly into the UAV control loop at 120 Hz, achieving closed-loop autonomous navigation without GPS or RF assistance. The system demonstrates sub-decimetric positioning accuracy (<8 cm), low latency (4.2 ms), and operates successfully on resource constrained micro-UAV platforms (250 g quadcopter with STM32 microcontroller. OpenELAB Technology Ltd., Garching bei München, Germany). Experimental validation includes complex 3D trajectory tracking, multi-room scalability analysis, and quantitative comparison with existing localization technologies, confirming the viability of Li-Fi guided autonomous flight for practical indoor application.

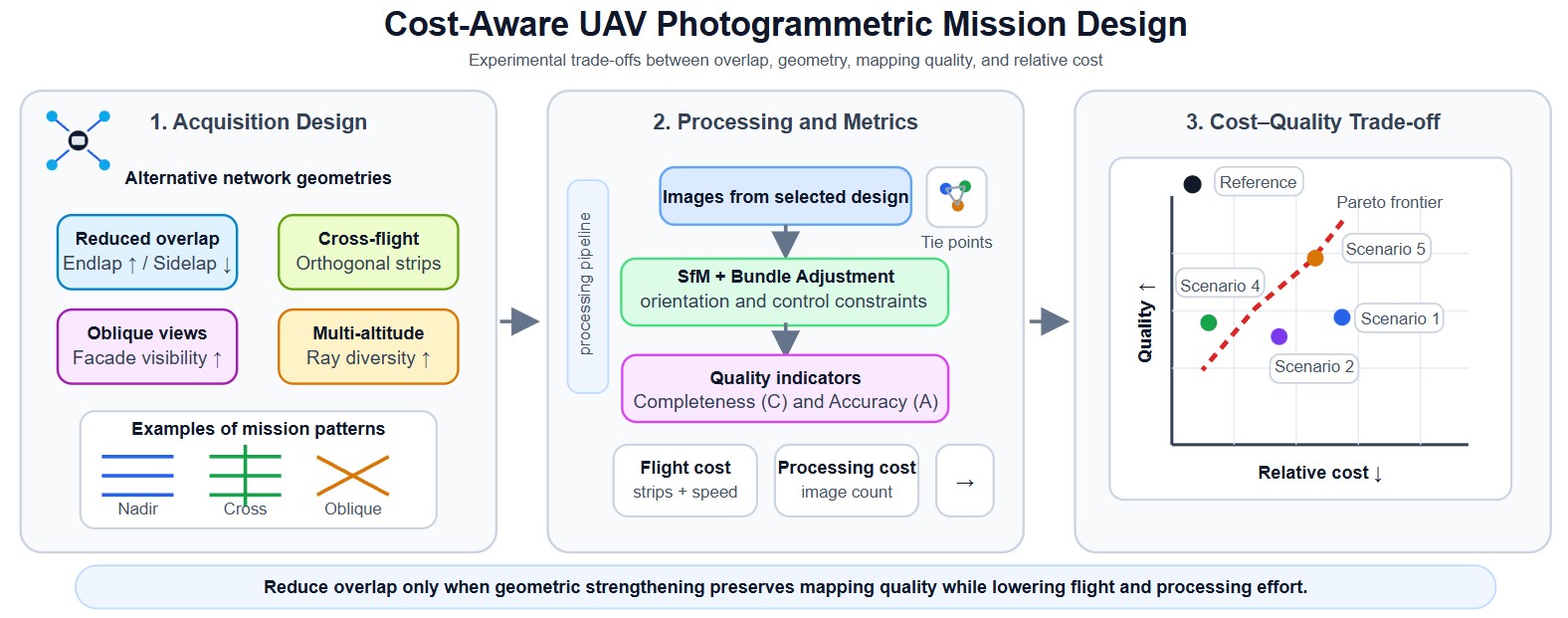
Unmanned Aerial Vehicle (UAV) photogrammetry enables high-resolution mapping and 3D reconstruction, yet operational and processing costs often scale rapidly with conservative mission designs (e.g., high overlap and redundant geometries). This paper presents an experimentally validated, cost-aware network-design study that quantifies cost–quality trade-offs in urban UAV photogrammetry. Five mission strategies—reduced sidelap with increased endlap, cross-flight compensation, partial high-overlap calibration, multi-altitude acquisition, and oblique cross-flight integration—are evaluated using a controlled experimental campaign over two urban test areas (2 × 20 ha), comprising 98 test blocks with overlaps ranging from 60% to 95%, sidelap from 20% to 80%, image counts from 70 to 2961, 7 check points, 15–17 ground control points, and GSD values between 2.6 cm and 4.6 cm, including nadir, oblique, cross-flight, and multi-altitude imagery. Each configuration is assessed using three indicators: (i) cost (flight and processing cost proxies), (ii) completeness, quantified by the number of reconstructed tie points, and (iii) accuracy, defined as a combined image–ground error at check points. Results show that cost reductions of over 50% in both flight and processing proxies can be achieved under the tested conditions while maintaining checkpoint accuracy comparable to a high-overlap reference configuration, provided that reduced overlap is compensated by stronger network geometry (e.g., cross-flight and/or oblique views). The analysis highlights product-dependent recommendations: vector map (MAP) generation can remain reliable even with very low sidelap (down to approximately 20%) when supported by adequate longitudinal overlap, whereas ortho-image mosaic (OIM) production requires at least moderate overlap in both directions (typically ≥60% endlap and sidelap) to ensure radiometric and geometric consistency. In contrast, dense 3D mesh reconstruction demands substantially stronger network geometry, including cross-flight and oblique imagery in addition to nadir views, with overlap levels exceeding 60% and preferably approaching 80%. These findings provide practical mission-planning guidelines that support efficient autonomous and semi-autonomous UAV mapping workflows.
Precision Archaeology leverages advanced technologies, such as unmanned aircraft systems (UAS), for documenting archaeological sites with high spatial resolution and accuracy. This paper presents a reproducible RGB–multispectral (MS) image-fusion workflow for Precision Archaeology, combining PPK-based georeferencing with quantitative assessment of product accuracy and spectral preservation. Within this framework, the repeatability of the results produced by the UAS data fusion method confirms its reliability and establishes it as a valuable documentation tool. Among the experimental applications conducted to date, this paper adds two more: the Sanctuary of Eukleia at Aigai and the funerary ensemble in the Philippi plain, where Aerial Remote Sensing was performed using a UAS equipped with a Post-Processed Kinematic (PPK)–Global Navigation Satellite System (GNSS) receiver. A ground-based GNSS receiver was used to measure control points (CPs) and the base point used to correct the coordinates of the UAS image acquisition centers using the PPK method. For both archaeological sites, RGB and MS stereoscopic images were acquired from flight altitudes of 60 and 100 m, respectively, achieving an overall theoretical solution accuracy of under 2 cm. Digital surface models (DSMs) were generated with spatial resolutions of approximately 2 cm for the RGB and about 14 cm for the MS images, along with orthophotomosaics with spatial resolutions of roughly 1 cm for RGB and 7 cm for MS images. In the final stage, image fusion of the RGB and MS orthophotomosaics was applied, improving the spatial resolution of the MS orthophotomosaics from 7 cm to approximately 1 cm, while simultaneously preserving nearly all the original spectral information in the new fused images. Spectral preservation was quantified via band-wise correlation between the original MS and fused images (≈0.99 average for the Philippi dataset; ≈0.85 average for Aigai, likely influenced by a ~45 min RGB–MS acquisition gap and corresponding shadow/illumination differences). These new images can be used for classification purposes, enabling the identification of different materials and the detection of archaeological feature pathology with optimal spatial resolution and accuracy.

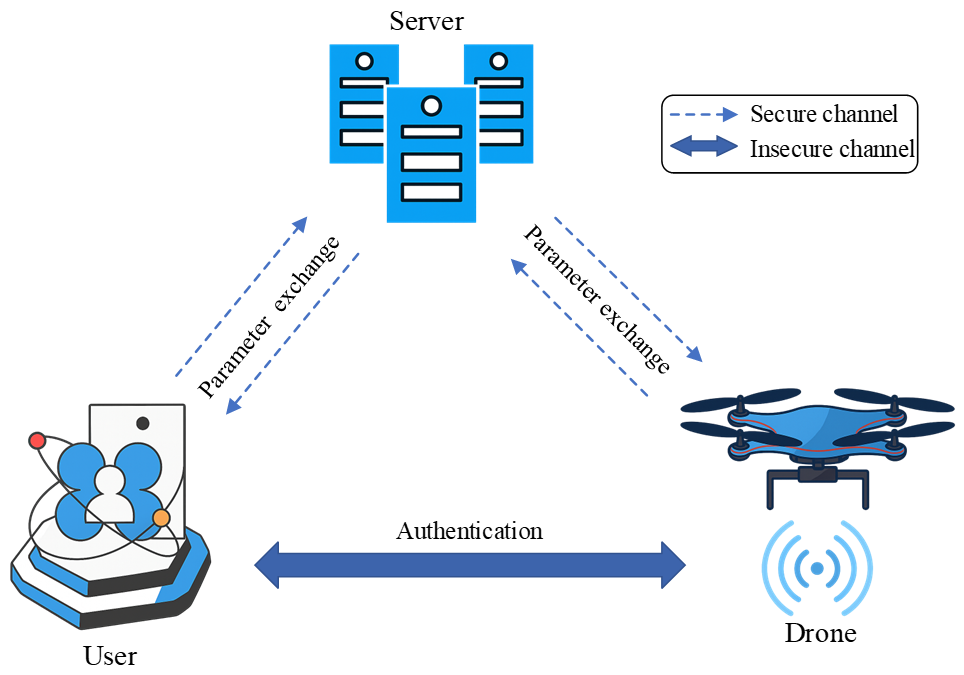
Unmanned aerial vehicles (UAVs is also known as drones) have significant applications in smart cities, and the information exchange between UAVs and the control server (CS) is conducted through wireless communication channels, which are susceptible to various security risks, such as network attacks and drone capture. To ensure the security and integrity of information in the Internet of Drones (IoD), identity authentication and key agreement protocols can be designed for protection. However, due to the unique characteristics of IoD, such as the extremely high mobility of drones in real scenarios and the resource constraints of drones, there is a need to meet the requirements for lightweight protocols. This paper proposes a strategy that uses cancelable biometric features to protect the biometric features of users during the authentication process. The method combines Fast Fourier Transform, Gaussian random projections, Position-Sensitive Hashing, fuzzy extractors, and Physical Unclonable Functions (PUF), meeting the security and lightweight needs of IoD authentication protocols. We use the Real-or-Random (ROR) model and the Avispa simulation tool to prove that our protocol is secure. Through comparative research, the proposed cancelable method has higher matching efficiency and better unlinkability, and our protocol offers higher security and faster computational efficiency.
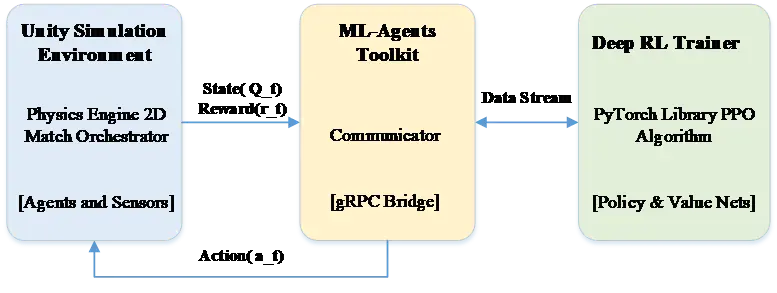
The operational utility of Unmanned Aerial Vehicles (UAVs) has evolved from passive surveillance to active engagement in disputed environments, where autonomous control must operate under highly dynamic and adversarial conditions. Hand-crafted heuristics often exhibit limited robustness when facing stochastic opponent behavior and non-stationary interactions. To address these challenges, we propose a Multi-Agent Deep Reinforcement Learning (MADRL) framework implemented in a Unity 6–based, physics-driven simulation that models flight dynamics and weapon kinematics. Agents are trained using Proximal Policy Optimization (PPO) with a composite reward function designed to encourage cooperative behaviors (e.g., coordinated target engagement) while enforcing safety constraints such as collision avoidance. In empirical evaluations, the learned policies achieve an 85% win rate against a heuristic baseline under the tested scenarios, exhibiting coordinated maneuvers and adaptive engagement strategies. These results indicate that multi-agent learning with decentralized execution can reduce operator workload and improve swarm effectiveness and survivability in conflict zone.
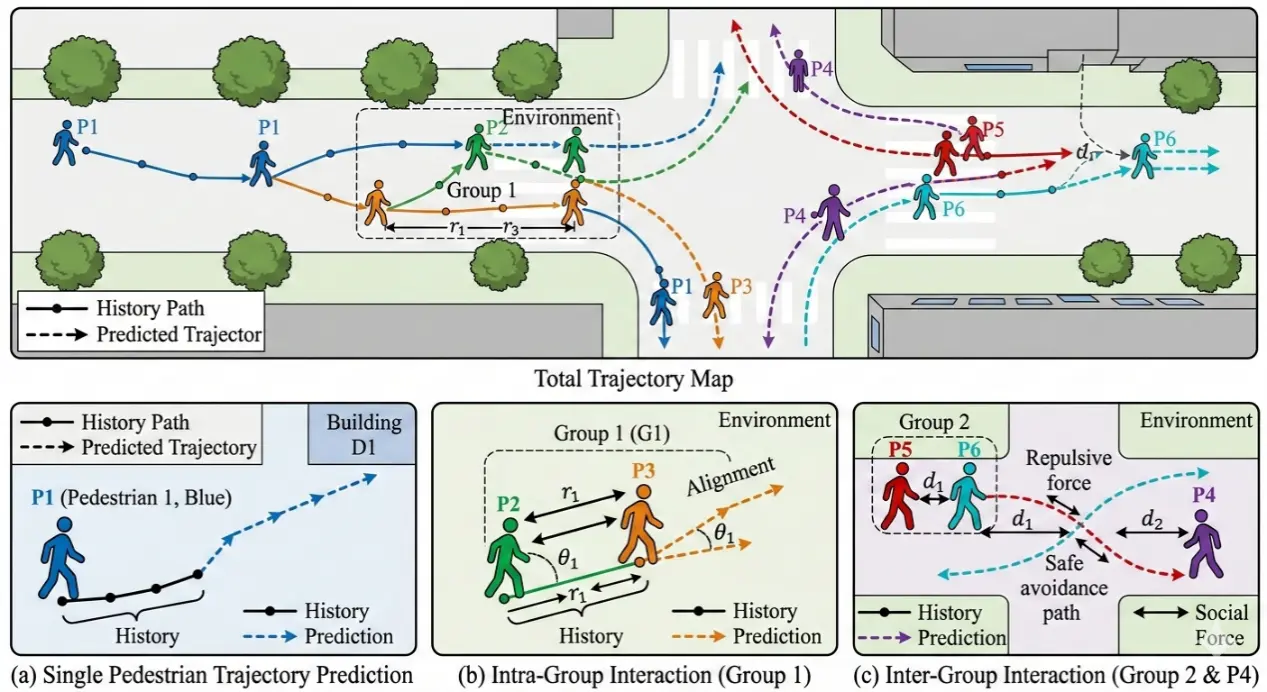
With the rapid development of autonomous driving, first-person view (FPV) pedestrian trajectory prediction has emerged as a key research direction to improve transportation system safety and operational efficiency. However, current studies ignore inter-pedestrian group information and long- and short-term dependence, leading to error accumulation at medium and long temporal horizons. To address these problems, we propose an FPV pedestrian trajectory prediction model dubbed MUGI-Net (Mixture of Universals and Group Interaction Network). It adopts a group pooling mechanism to adaptively aggregate group nodes and build sparse intra- and inter-group interaction graphs to fuse group interaction information. Afterward, it employs a Mixture of Universals (MoU) structure that combines MoF (Mixture of Feature Extractors) and MoA (Mixture of Architectures) to capture short-term dynamics and long-term dependencies simultaneously. Extensive experiments on the JAAD and PIE datasets show that MUGI-Net reduces the 1.5 s prediction MSE by 5% compared with the state-of-the-art AANet, and achieves the best performance on multiple key metrics, which is beneficial for autonomous driving in mixed traffic scenarios.
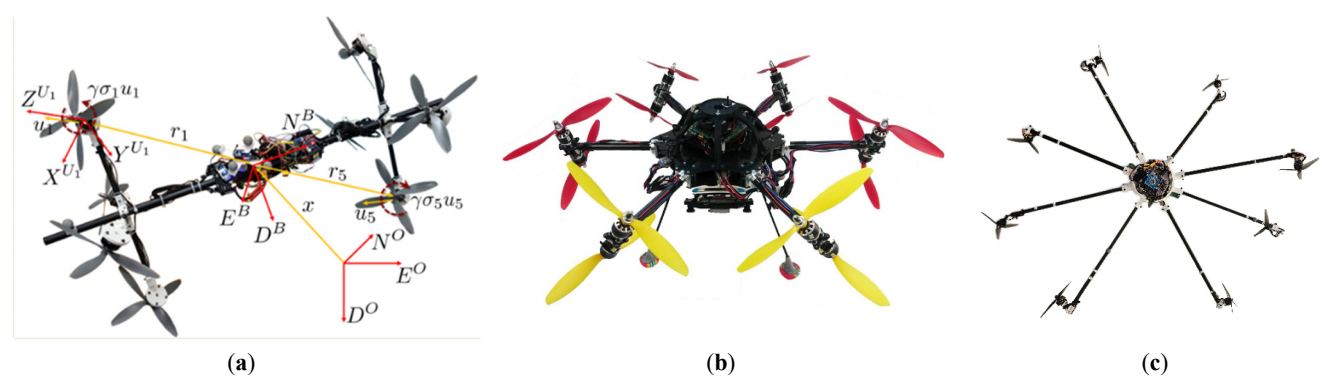
Thrust-vectoring UAVs can realize decoupling of position and attitude compared with conventional quadrotors due to the ability to change thrust direction, and are used to perform various complex indoor and outdoor missions. However, existing trajectory generation frameworks are mostly for quadrotors with fixed thrust direction and a coplanar surface, and do not consider the dynamics of thrust-vectoring UAVs. To address this, this paper proposes a multi-objective trajectory generation method for thrust-vectoring UAVs in constraint space. By parametrically modeling the constraint space, the method considers the effects of environmental boundary constraints and platform dynamics characteristics on the collision constraints and motion decoupling of the trajectory, and comprehensively optimizes the trajectory’s indicators of stability, speed, and safety to plan the states and input actions of the flight trajectory. Meanwhile, a trajectory generation evaluation system is proposed, given that compared with the conventional quadratic objective function, the proposed method is effective in reducing the attitude change of the trajectory, improving the rapidity and safety, in which $$L_{\theta}$$ and $$L_{r i s k}$$ are reduced by 70.4% and 19.1%, respectively. Meanwhile, by comparing with the conventional quadrotor, the advantages of the thrust-vectoring in decoupling motion are quantified, especially in reducing the attitude change during flight, the pitch angle of the generated trajectory is reduced from ±30° to within ±20° degrees, which exerts the motion decoupling advantages of the thrust-vectoring.