Unmanned Aerial Vehicles (UAVs) equipped with RGB cameras are increasingly used as low-cost tools for crop monitoring, offering a range of vegetation indexes in the visible spectral range. These indexes have often been reported to correlate with other multispectral indexes such as the Normalized Difference Vegetation Index (NDVI) during active growth stages. However, still efforts should be done about their performance under conditions of canopy degradation. In this study, UAV flights were conducted over a cereal field immediately after harvest, when the canopy consisted mostly of bare soil and dry residues. RGB-based indexes were calculated from the orthomosaic, normalized to a [0–1] scale, and compared to NDVI derived from a multispectral sensor. Data preprocessing included ground control point (GCP) georeferencing, removal of NoData pixels, and raster alignment. Results revealed very weak correlations between RGB indexes and NDVI (Pearson r < 0.15), with Visible Atmospherically Resistant Index (VARI) showing almost no variability across the field. Although the Leaf Index (GLI), yielded the lowest error values, all RGB indexes failed to reproduce the variability of NDVI under post-harvest conditions. These findings highlight a critical methodological limitation: RGB indexes are unsuitable for vegetation monitoring when canopy cover is severely reduced. While they remain useful during active growth, their reliability diminishes in degraded or post-harvest scenarios, thereby limiting their application in assessing abiotic stress in cereals.

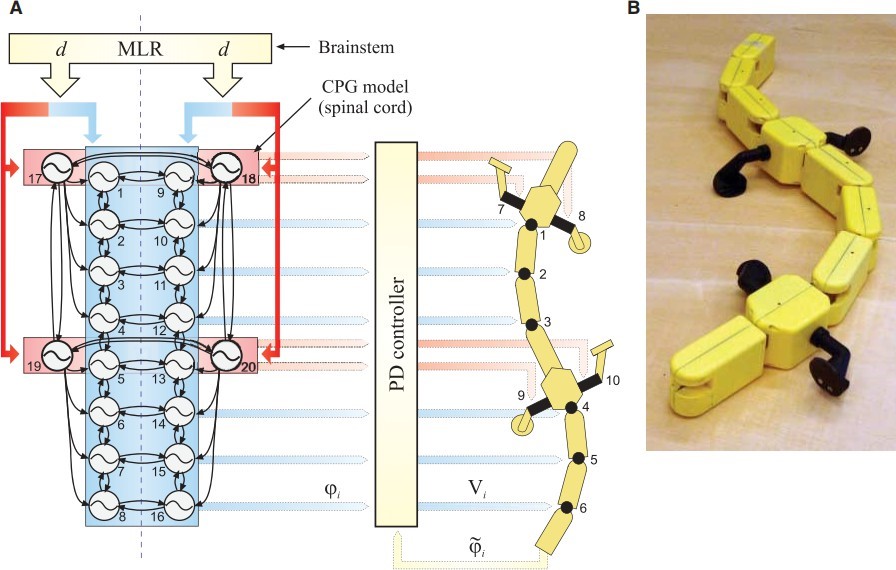
Soft robotics has emerged as a promising direction for enabling safe, adaptive, and energy-efficient interactions with unstructured environments due to its inherent compliance. Recently, Deep Reinforcement Learning (DRL) has become a powerful tool for autonomous behavior generation in soft robots, surpassing limitations of classical model-based control. However, despite rapid growth of publications in this domain, there is still a lack of systematic comparative surveys that clarify how different DRL approaches have been used for soft mobile robots, what types of tasks they address, and what performance evaluation criteria have been used. In this article, we review and classify existing works in DRL-enabled soft robotics, focusing particularly on soft mobile systems, and present a structured synthesis of contributions, algorithms, training strategies, and real-world applications. Unlike previous reviews that discuss soft robotics or DRL separately, this paper explicitly provides cross-comparison across DRL paradigms and soft robot tasks, enabling researchers to identify suitable DRL approaches for different soft mobile robotic behaviors. Finally, major challenges and promising future directions are proposed to advance this interdisciplinary research area.
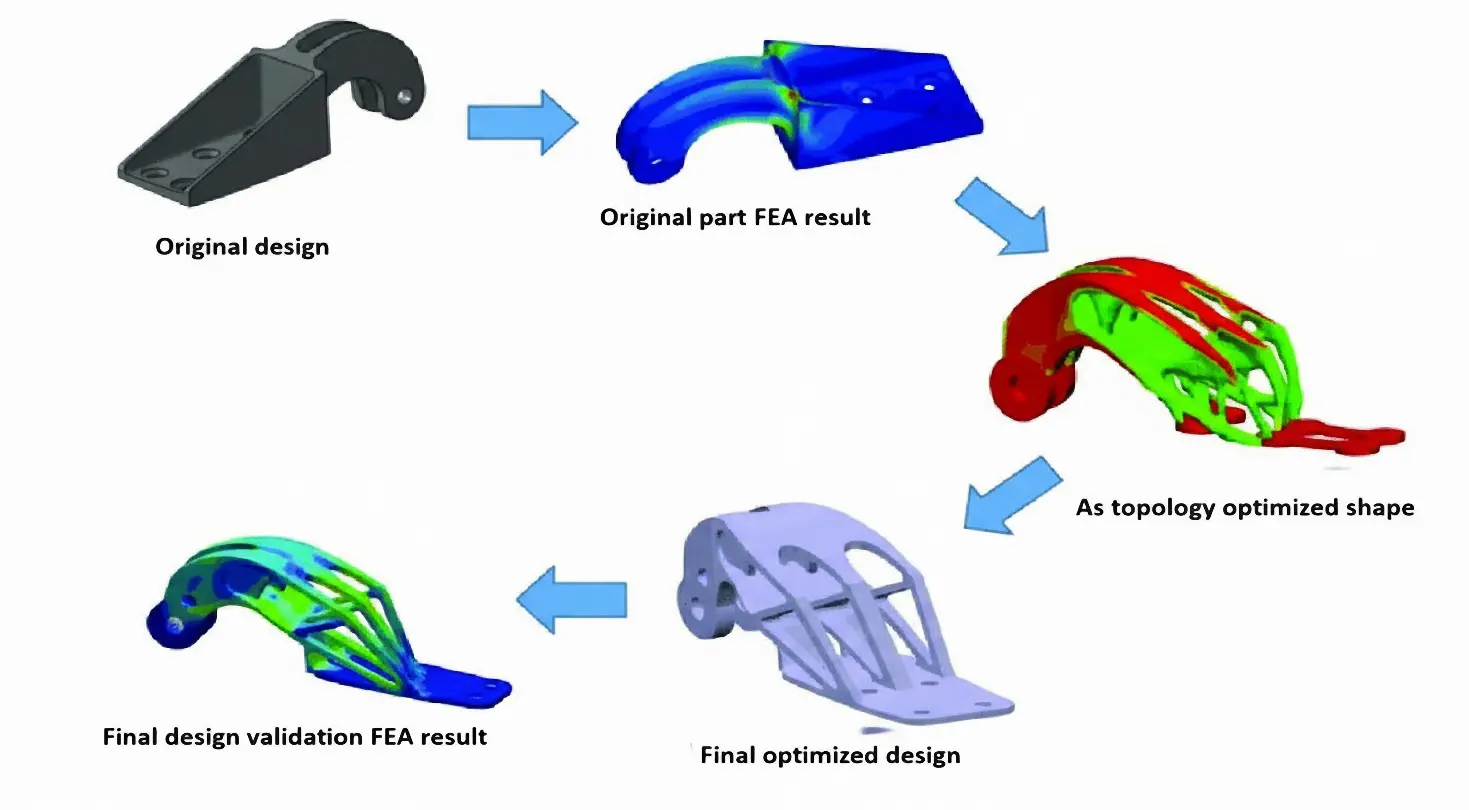
Payload drones are often limited more by frame weight than by motor power. This work aims to design, optimize, and validate a flat octocopter frame with eight independently driven rotors arranged symmetrically on separate arms. The drone frame design in SOLIDWORKS uses Finite Element Analysis (FEA) and topology optimization to remove material from low-stress regions while keeping the main load paths intact. The final design cuts the frame mass by 37.3% compared to the baseline model and reduces the 3D printing time by about five hours using a Creality K1C printer with Polylactic Acid (PLA) filament. These changes increase the available thrust-to-weight margin for payload without exceeding the allowable stress or deformation limits of the material. The electronic components also identified compatible flight controllers, ESCs, motors, and radio systems to show that the proposed frame can be integrated into a complete multirotor platform. Overall, this work demonstrates a practical approach to designing lighter octocopter frames that are easier to 3D print and can be used more effectively for delivery and inspection missions.
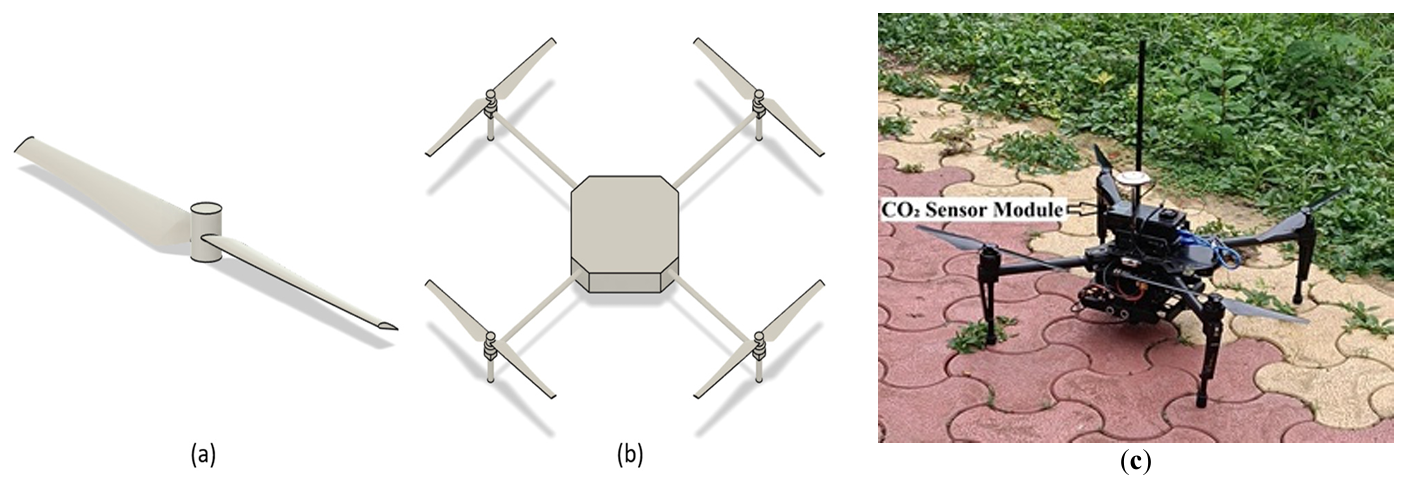
Recent advancements in unmanned aerial vehicle (UAV) technology have enabled flexible, high-resolution monitoring of atmospheric CO2, particularly in complex or otherwise inaccessible environments. This study employs Computational Fluid Dynamics (CFD) to investigate the downwash flow field of a quadcopter UAV in hover condition with the objective of identifying low-disturbance regions suitable for accurate atmospheric sensor placement. A quadcopter model was simulated using the SST k-ω turbulence model. Simulations were performed at rotor speeds ranging from 1000 to 6000 rpm. Results show that the strongest downwash and turbulence occur directly beneath the rotors, while airflow above the central fuselage and regions laterally distant from the rotors remain significantly calmer. The findings strongly recommend placing gas sensors either above the drone body or sufficiently far horizontally from the rotor plane to minimize measurement errors caused by propeller-induced flow.
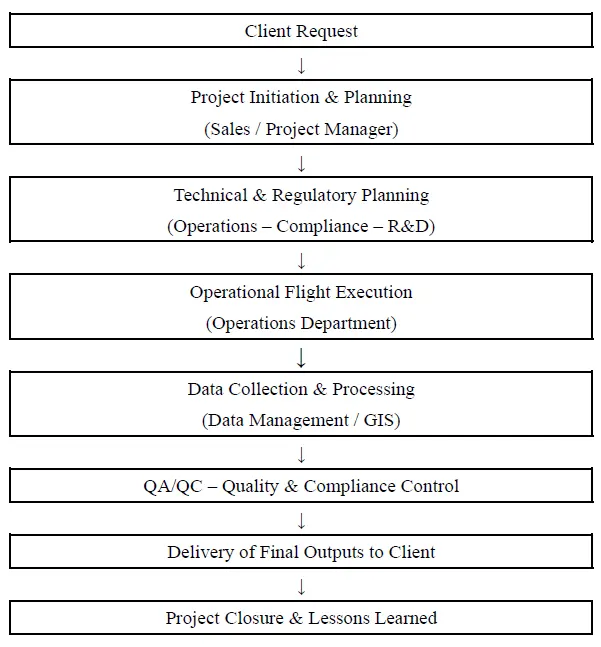
The rapid evolution of geoinformatics technologies, particularly through the adoption of Unmanned Aircraft Systems (UAS), has brought significant changes to the collection, processing, and analysis of spatial data. UAS are increasingly integrated into Geographic Information Systems (GIS), remote sensing, and spatial analysis, enhancing efficiency and accuracy in applications such as precision agriculture and infrastructure management. However, limited empirical research has examined the consequences of their integration for operational efficiency, regulatory compliance, and related management practices in the Greek context. This study evaluates how UAS integration into the operations of Greek geoinformatics firms enhances efficiency and supports compliance with Greek and European regulatory frameworks. A qualitative multi-case study methodology is employed across five Greek geoinformatics service providers, and data are collected through semi-structured interviews and secondary sources. Findings indicate that UAS integration improves the quality of spatial data, reduces data collection costs, and facilitates regulatory compliance of these firms. Finally, the study highlights the emergence of optimal operational management policies of UAS including standardized end-to-end workflows, clear role allocation and compliance responsibilities, systematic QA/QC procedures, proactive regulatory monitoring (PDRA/SORA readiness), which strengthen and promote innovative geoinformatics technologies.
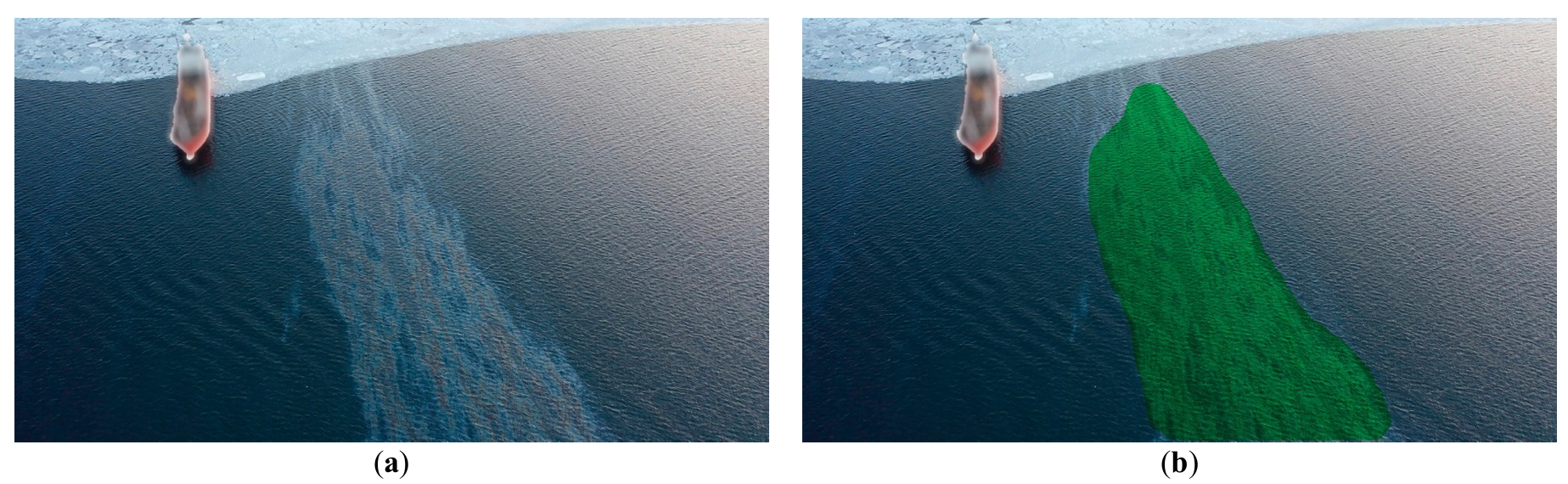
The objective of marine ecological safety necessitates the development of comprehensive, integrated strategies for oil spill management, encompassing advanced monitoring and effective remediation. This paper introduces and validates a novel integrated methodology and conceptual framework for autonomous marine environmental safety. The core of this framework lies in the merging of AI-assisted monitoring capabilities with a multi-agent Unmanned Aerial Vehicle (UAV) system for targeted dispersant delivery. UAV systems, within this methodology, function as a cost-effective and readily deployable operational platform. The study details the primary development stages of the methodology-driven system and presents empirical results from in-situ field trials. The framework leverages artificial intelligence (AI) tools developed and validated for slick monitoring, which execute primary segmentation for spill detection and subsequent secondary segmentation to categorize the slick into thickness uniformity maps. Datasets of actual marine oil slick imagery were compiled to facilitate robust deep learning of the underlying neural network architectures. The study explores scientific feasibility, specifically employing Laser-Induced Fluorescence (LIF) spectroscopy to classify oil product grades and assess the ecological impact of various remediation agents on local phytoplankton communities. This integrated method for spill response is underpinned by successful field validation results. The full methodology was tested during actual oil spill incidents in the waters of Peter the Great Bay from 2019 to 2024. The article presents experimental validation of a new concept and methodology of integrated environmental safety of marine areas by a multi-agent UAV system in the event of oil product spills.
This article briefly presents the design steps, from the conceptual design up to flight simulation of the Euclid 3D printed small Unmanned Aerial Vehicle (sUAV). The use of valid tools and proper methodology implementation is essential throughout this entire path to render the aircraft’s kinematics properly in the flight simulator. The primary object of study in this article is the Euclid sUAV handling qualities evaluation through flight simulation, using Cooper-Harper Handing Qualities Rating Scale. A novel methodology consisting of eighteen flight tests is presented, each one evaluating a certain flight procedure. For each procedure, performing instructions are provided. This methodology can be used either as is, or modified, to evaluate the handling qualities of similar sUAV’s. Furthermore, a full video of the procedure is given for validation and replication purposes. The results from the application of the 18-step procedure for the Euclid sUAV, indicated that all scores fluctuated in the (1–3) score region. These score region is translated as satisfactory handling qualities, without improvement needed to the system, according to Cooper-Harper Handing Qualities Rating Scale.