Deadline for manuscript submissions: 30 September 2025.

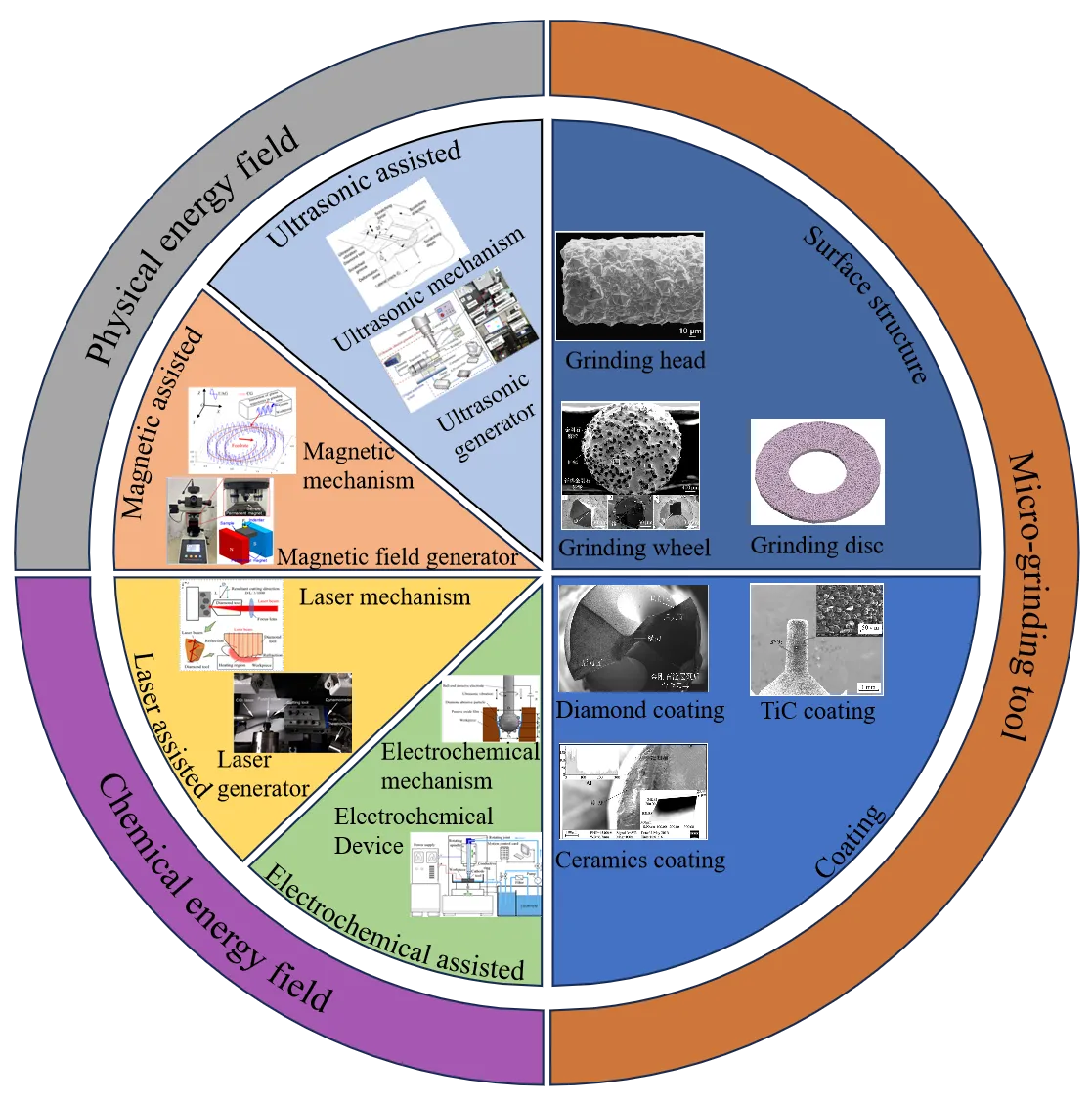
Hard, brittle and difficult-to-machine materials are prone to surface cracks, subsurface damage and other defects in the traditional grinding process, accompanied by low processing efficiency and severe tool wear. As a new type of processing technology, energy field-assisted grinding provides a new approach for the efficient and high-quality processing of hard and brittle materials. This paper reviews the latest research progress of muti-energy field-assisted grinding from aspects such as the types and selection of grinding tools, processing equipment and physical-chemical coupled mechanisms. Firstly, micro-grinding tools are classified based on different surface structures and coating materials, with the aim to enhance processing efficiency, improve the surface quality and geometric accuracy of workpieces, and reduce tool wear. Secondly, the processing mechanisms, parameter selection and current difficulties faced by four energy field-assisted grinding methods, including laser-assisted grinding, electrochemical-assisted grinding, magnetic-assisted grinding and ultrasonic field-assisted grinding, are discussed under both chemical and physical effects. Thirdly, different equipment and auxiliary devices developed for energy field-assisted grinding have been introduced, providing reliable platforms for the distribution design and efficient regulation of the energy field. Finally, the cutting-edge progress, main challenges and development trends of energy field-assisted grinding are prospected, illustrating the great potential of this technology in fields such as aerospace, electronics, and optical components.
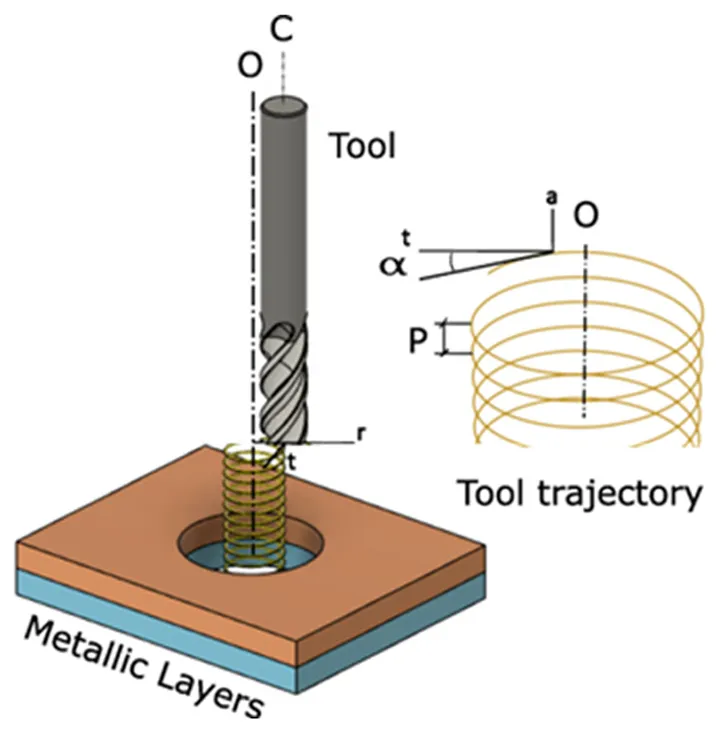
Smart factories increasingly rely on real-time data to optimize manufacturing, yet machining operations, particularly in aerospace stack drilling, still face challenges such as low productivity and accelerated tool wear. While advanced CNC machines already capture rich process data, its full potential for real-time decision-making remains underexplored. This work introduces a novel approach that leverages machine learning (ML) to identify material layers and optimize cutting conditions during drilling (helical milling) of aluminum–titanium stacks. Unlike prior methods that require additional sensors or complex instrumentation, our approach uniquely utilizes only spindle power signals from the CNC machine. Data maps consisting of cutting coefficients are used to train ML models to reliably predict material transitions across multiple layers under a range of cutting conditions. The results demonstrate appropriate material identification in comparison to experiments, enabling significant improvements in the hole-making of aerospace stacks. This study contributes a scalable, sensor-free, and non-intrusive framework for smart machining, establishing a practical pathway for process optimization in aerospace manufacturing without disrupting existing shop-floor setups.
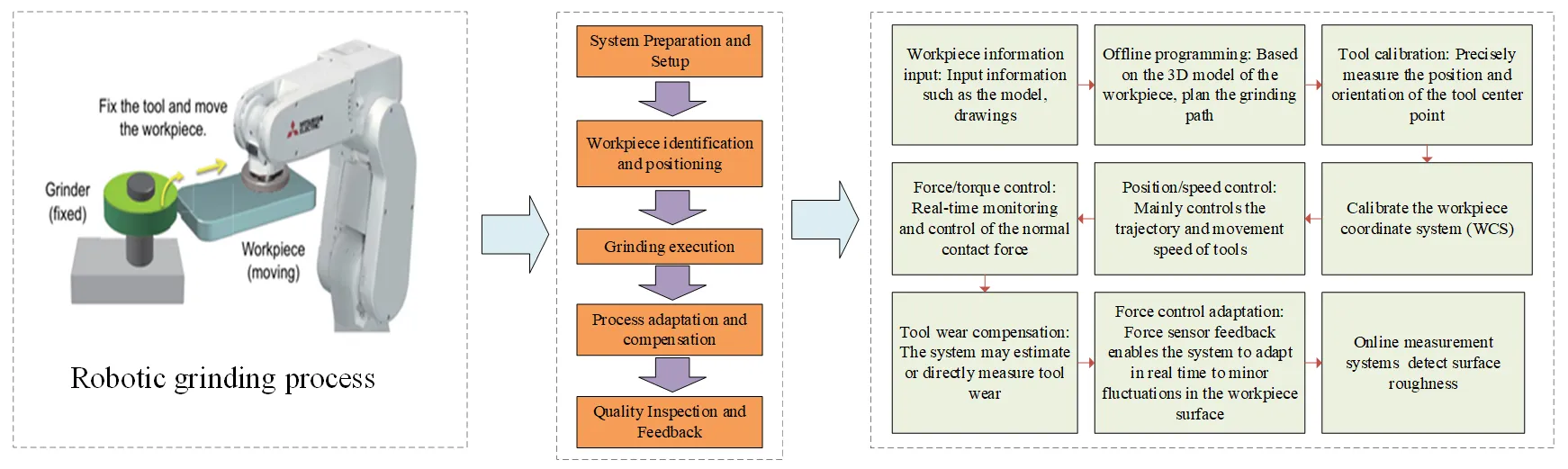
Robot grinding technology has shown broad application prospects in the field of machining complex curved parts due to its high flexibility, strong adaptability, and high automation. However, industrial robots are generally only suitable for rough machining, and for semi-finishing and finishing, improving the machining accuracy of robots and the surface quality of parts is a key issue. This paper summarizes the current research status of robot grinding and provides a reference for realizing robot precision grinding. At present, the research on robot grinding technology mainly focuses on robot pose control, force/position hybrid control strategy, intelligent machining path planning, vibration suppression technology, compliance control, and so on, aiming at solving the key bottleneck problems such as low machining accuracy, large grinding force fluctuation and poor surface quality consistency caused by insufficient robot stiffness. Firstly, the development history of the robot grinding system and the research status of process technology are summarized systematically. Secondly, the analysis focuses on grinding path planning, programming technology, and robot compliance force control technology. Finally, the current status of optimization research in robot grinding technology is summarized. The overarching purpose of this paper is to provide a systematic analysis and a comprehensive reference framework, aiming to address the core challenges hindering the achievement of high-precision, consistent surface quality in robotic grinding manufacturing. Based on the summarized state-of-the-art, robot grinding technology development trend is also predicted.
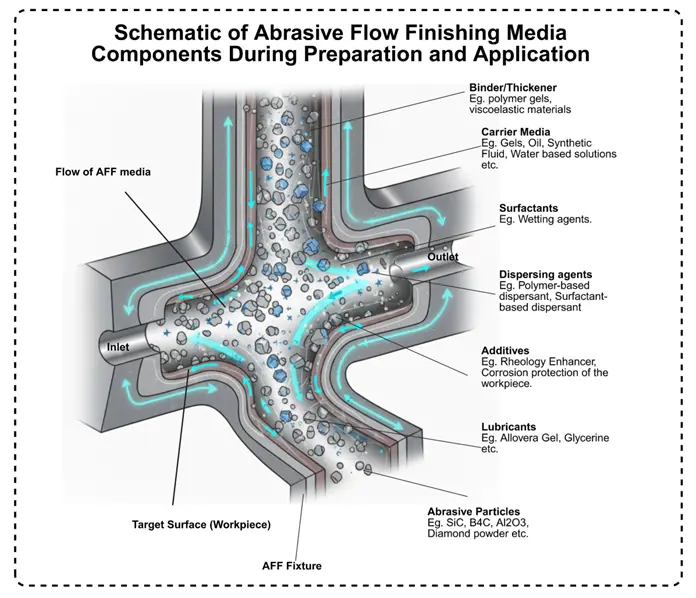
Hybrid-Based Abrasive Flow Finishing (HAFF) represents a significant evolution in precision manufacturing, particularly in addressing the inherent limitations of traditional finishing techniques when dealing with complex geometries and challenging materials. HAFF achieves remarkable precision in managing particle motion by blending state-of-the-art energy inputs and mechanical reinforcements, including sonic vibrations, electromagnetic influences, and beam-guided supports, which accelerate the pace of material extraction and elevate the overall finish of surfaces. This paper comprehensively reviews various HAFF approaches, including energy-assisted methods (e.g., electrochemical, ultrasonic, and laser), force-assisted techniques (e.g., magnetic, hydrodynamic, and vibration), and hybrid energy-force integrated systems. Recent advancements, such as cryogenic-assisted, rotational-assisted, and magnetorheological-assisted AFF, are also discussed in this review. Recent studies from 2023 to 2025 highlight improvements in material removal rates of up to 80% and reductions in surface roughness of over 90% across various HAFF variants, underscoring the timeliness of these developments. Incorporating diverse power sources and mechanical aids into HAFF allows for exact oversight of particle interactions, speeding up the removal of excess material, refining the exterior finish, and broadening its utility across detailed designs and tough-to-process substances. Despite significant progress, challenges persist in scaling HAFF processes for industrial applications, improving cost efficiency, and implementing effective real-time monitoring systems. The future trajectory of HAFF research will focus on the development of innovative abrasive media, advanced automation technologies, artificial Intelligence techniques, and sustainable manufacturing practices. This study examines all existing HAFF technology solutions and evaluates product applications for aerospace, automotive, medical equipment, and micro-manufactured devices. The discussion highlights the industries that require more advanced technological investigations.
Grinding is a key precision machining method for achieving high surface quality and dimensional accuracy in carbon fiber reinforced silicon carbide ceramic matrix composites (Cf/SiC). Ultrasonic vibration-assisted grinding (UVAG), with its high-frequency intermittent loading characteristics, offers a novel approach to regulating the dynamic removal behavior of heterogeneous materials. This study firstly analyzed the material removal mechanism of abrasive particles based on abrasive geometry and kinematics. On this basis, mechanical models are developed for a single abrasive grain across three removal stages: ductile removal, ductile-to-brittle transition, and brittle removal. These are further extended into a grinding force prediction model by integrating the effects of multiple abrasive grains and process correction factors during ultrasonic-assisted grinding. Finally, the model is validated through UVAG experiments. Results show that under an ultrasonic frequency of 20 kHz and amplitude of 5 μm, the predicted grinding forces match the experimental values with a high degree of accuracy (98.98%). This grinding force model provides theoretical support and process guidance for high-performance, low-damage precision machining of Cf/SiC composites.
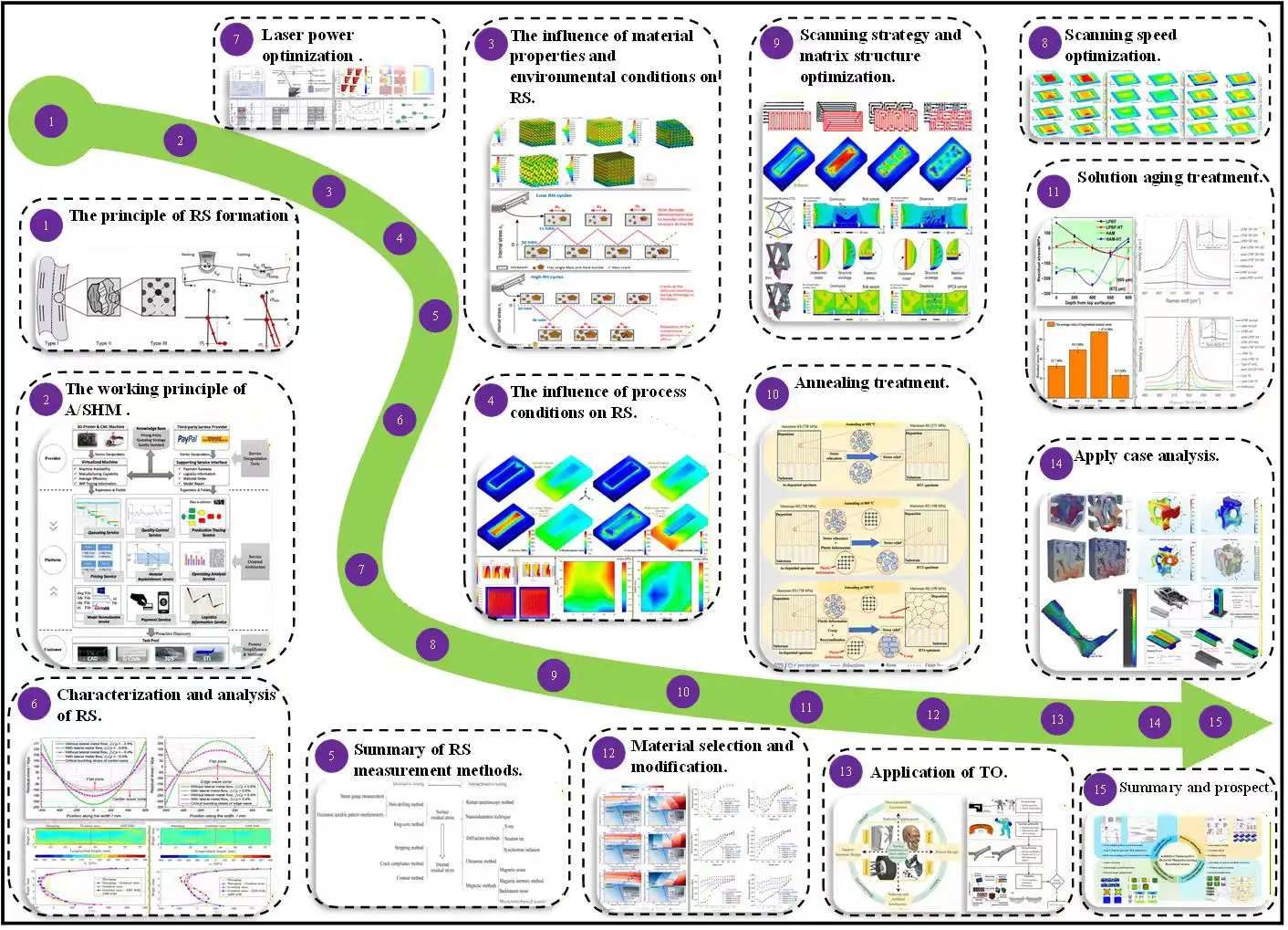
This review methodically expounds on the genesis, distribution characteristics, and control methodologies of residual stress (RS) in additive/subtractive hybrid manufacturing (A/SHM). RS, originating from non-uniform temperature fields during manufacturing, rapid solidification of the molten pool, and complex thermal cycling, are key factors causing component deformation, performance degradation, and even cracking. It is evident that significant limitations are imposed on the industrial implementation of A/SHM technology in the domain of high-end equipment manufacturing. This review methodically unveils the influence patterns of process conditions, such as scanning strategies and laser parameters, on RS distribution. It elucidates the intrinsic relationship between microstructural evolution and RS and summarizes effective approaches to regulating RS through process optimization, post-heat treatment, and material modification. This paper proactively proposes a development direction for precise RS regulation through intelligent monitoring and control. This approach provides a theoretical foundation and technical support to enhance the reliability of A/SHM components and advance their industrial applications.