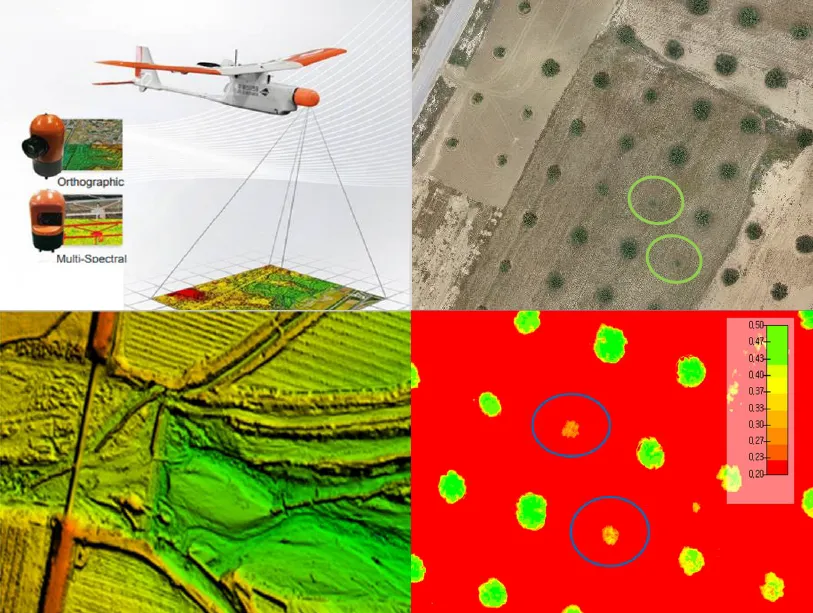
The integration of drone technology in precision agriculture offers promising solutions for enhancing crop monitoring, optimizing resource management, and improving sustainability. This study investigates the application of UAV-based remote sensing in Sidi Bouzid, Tunisia, focusing on olive tree cultivation in a semi-arid environment. REMO-M professional drones equipped with RGB and multispectral sensors were deployed to collect high-resolution imagery, enabling advanced geospatial analysis. A comprehensive methodology was implemented, including precise flight planning, image processing, GIS-based mapping, and NDVI assessments to evaluate vegetation health. The results demonstrate the significant contribution of UAV imagery in generating accurate land use classifications, detecting plant health variations, and optimizing water resource distribution. NDVI analysis revealed clear distinctions in vegetation vigor, highlighting areas affected by water stress and nutrient deficiencies. Compared to traditional monitoring methods, drone-based assessments provided high spatial resolution and real-time data, facilitating early detection of agronomic issues. These findings underscore the pivotal role of UAV technology in advancing precision agriculture, particularly in semi-arid regions where climate variability poses challenges to sustainable farming. The study provides a replicable framework for integrating drone-based monitoring into agricultural decision-making, offering strategies to improve productivity, water efficiency, and environmental resilience. The research contributes to the growing body of knowledge on agricultural technology adoption in Tunisia and similar contexts, supporting data-driven approaches to climate-smart agriculture.
The detection of drones in complex and dynamic environments poses significant challenges due to their small size and background clutter. This study aims to address these challenges by developing a motion-based pipeline that integrates background subtraction and deep learning-based classification to detect drones in video sequences. Two background subtraction methods, Mixture of Gaussians 2 (MOG2) and Visual Background Extractor (ViBe), are assessed to isolate potential drone regions in highly complex and dynamic backgrounds. These regions are then classified using the ResNet18 architecture. The Drone-vs-Bird dataset is utilized to test the algorithm, focusing on distinguishing drones from other dynamic objects such as birds, trees, and clouds. By leveraging motion-based information, the method enhances the drone detection process by reducing computational demands. Results show that ViBe achieves a recall of 0.956 and a precision of 0.078, while MOG2 achieves a recall of 0.857 and a precision of 0.034, highlighting the comparative advantages of ViBe in detecting small drones in challenging scenarios. These findings demonstrate the robustness of the proposed pipeline and its potential contribution to enhancing surveillance and security measures.

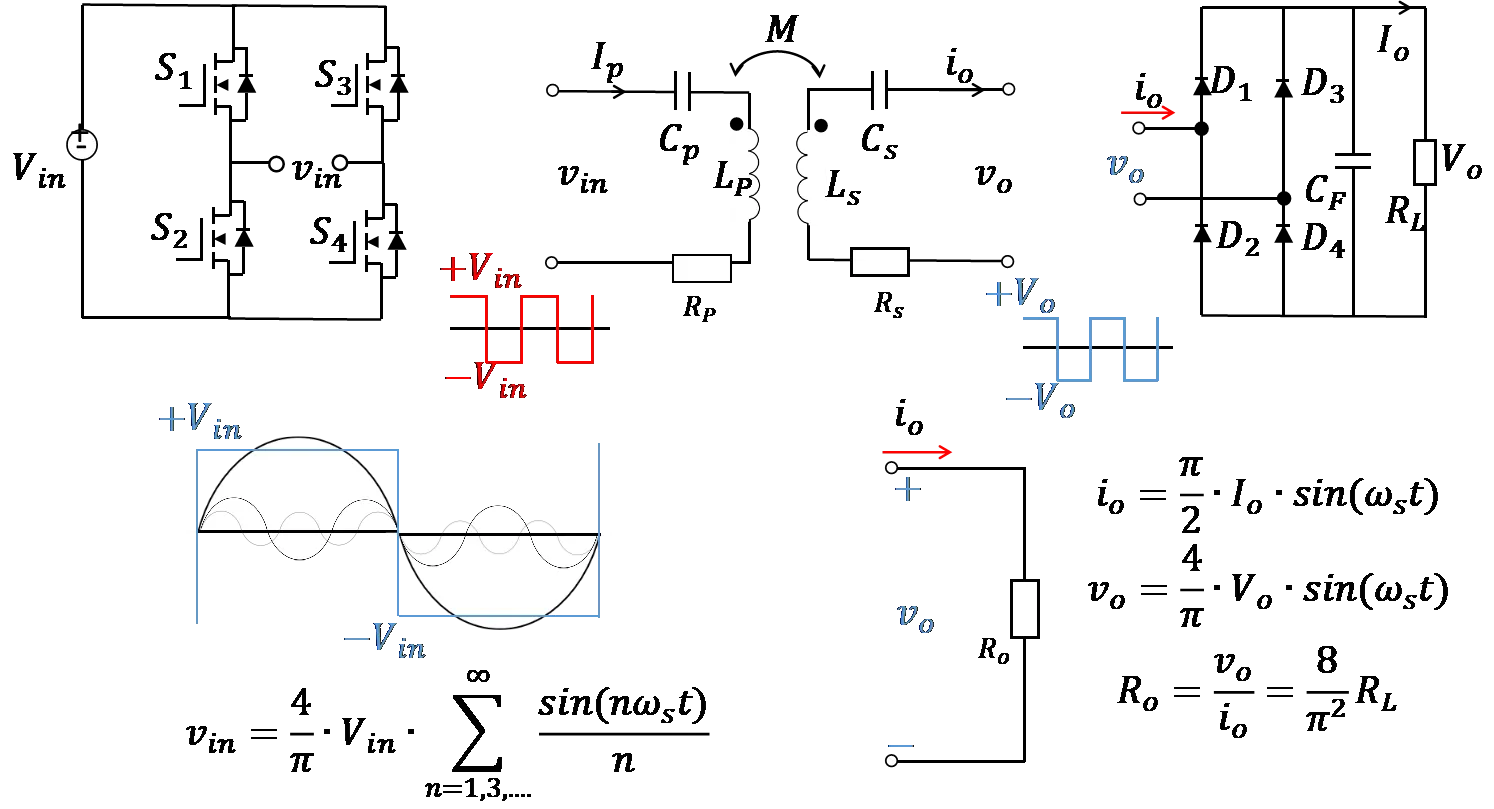
To address the limited endurance of unmanned aerial vehicles (UAVs) and the efficiency degradation and instability in traditional wireless charging systems, this study proposes a high-efficiency UAV wireless charging system based on the parity-time (PT) symmetric principle. A non-Hermitian coupled resonator model is established, incorporating a dynamic gain-loss balancing mechanism and real-time parameter feedback control to adaptively compensate for coupling coefficient fluctuations caused by UAV positional deviations, thereby maintaining PT-symmetric phase stability. The receiver coil adopts a planar air-core spiral structure and is integrated beneath the UAV landing gear to minimize interference with aircraft operations. Experimental results show a transmission efficiency of 90.2% at 65 W output power, with both power and efficiency remaining stable in the strong coupling region. The system demonstrates strong robustness against horizontal misalignment and eliminates the need for complex relay structures or high-precision alignment. This work not only provides a theoretical foundation for the application of PT-symmetry in wireless power transfer but also offers a novel technical pathway for enhancing UAV endurance.
With the growing use of Real Time Kinematics (RTK) Unmanned Aerial Vehicles (UAVs) and advancements in ground control points (GCPs), assessing positional accuracy of UAV derived orthophoto mosaics is crucial. This study aimed to improve UAV aerial image accuracy for more reliable orthophoto mosaics by examining the positional accuracy of orthophoto mosaics derived with (1) an RTK UAV; and (2) an RTK UAV combined with AeroPoints 2 GCPs. We tested two GPS base station methods for the RTK UAV: self-determined and manually assigned coordinates. The manually assigned coordinates resulted in significantly lower root mean square error (RMSE = 0.0729 m) compared to the self-determined method (RMSE = 1.9762 m), indicating improved accuracy. For the AeroPoints 2 GCPs, we recorded coordinates from a central GCP at a known location and four additional GCPs placed in each cardinal direction. The AeroPoints 2 system showed lower RMSE at all points compared to the RTK, with the central GCP at 0.0136 m, indicating high accuracy. These findings suggest that while RTK UAVs improve accuracy with manual base station assignment, incorporating AeroPoints 2 GCPs provides consistently higher precision across multiple locations. The study highlights the potential of AeroPoints 2 GCPs and suggests further research opportunities to enhance RTK UAV accuracy in areas lacking GPS correctional networks.
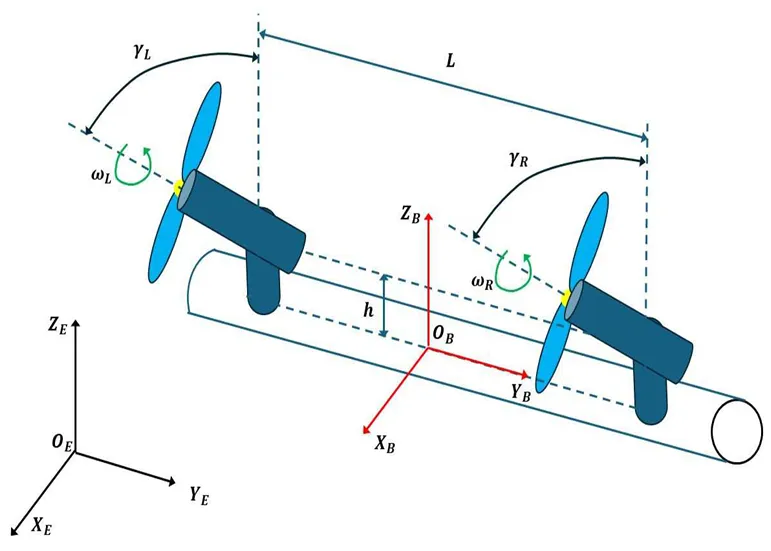
Bicopter UAVs can find use in several civilian and defence applications. In the present article a solution of the nonlinear optimal control problem of 6-DOF bicopters is first attempted using a novel nonlinear optimal control method. This method is characterized by computational simplicity, clear implementation stages and proven global stability properties. At a first stage, approximate linearization is performed on the dynamic model of the 6-DOF bicopter with the use of first-order Taylor series expansion and through the computation of the system’s Jacobian matrices. This linearization process is carried out at each sampling instance, around a temporary operating point. At a second stage, an H-infinity stabilizing controller is designed for the approximately linearized model of the 6-DOF bicopter. To find the feedback gains of the controller an algebraic Riccati equation is repetitively solved, at each time-step of the control method. Lyapunov stability analysis is used to prove the global stability properties of the control scheme. Next, the article examines a multi-loop flatness-based control method for the dynamic model of the 6-DOF bicopter. The drone’s dynamics is written in the form of two chained subsystems which are shown to be differentially flat. The state vector of the second subsystem becomes virtual control input to the first subsystem, while the control inputs of the first subsystem become setpoints for the second subsystem. Local controllers for the individual subsystems invert their dynamics. The global stability properties of the multi-loop flatness-based control scheme are also proven though Lyapunov analysis.