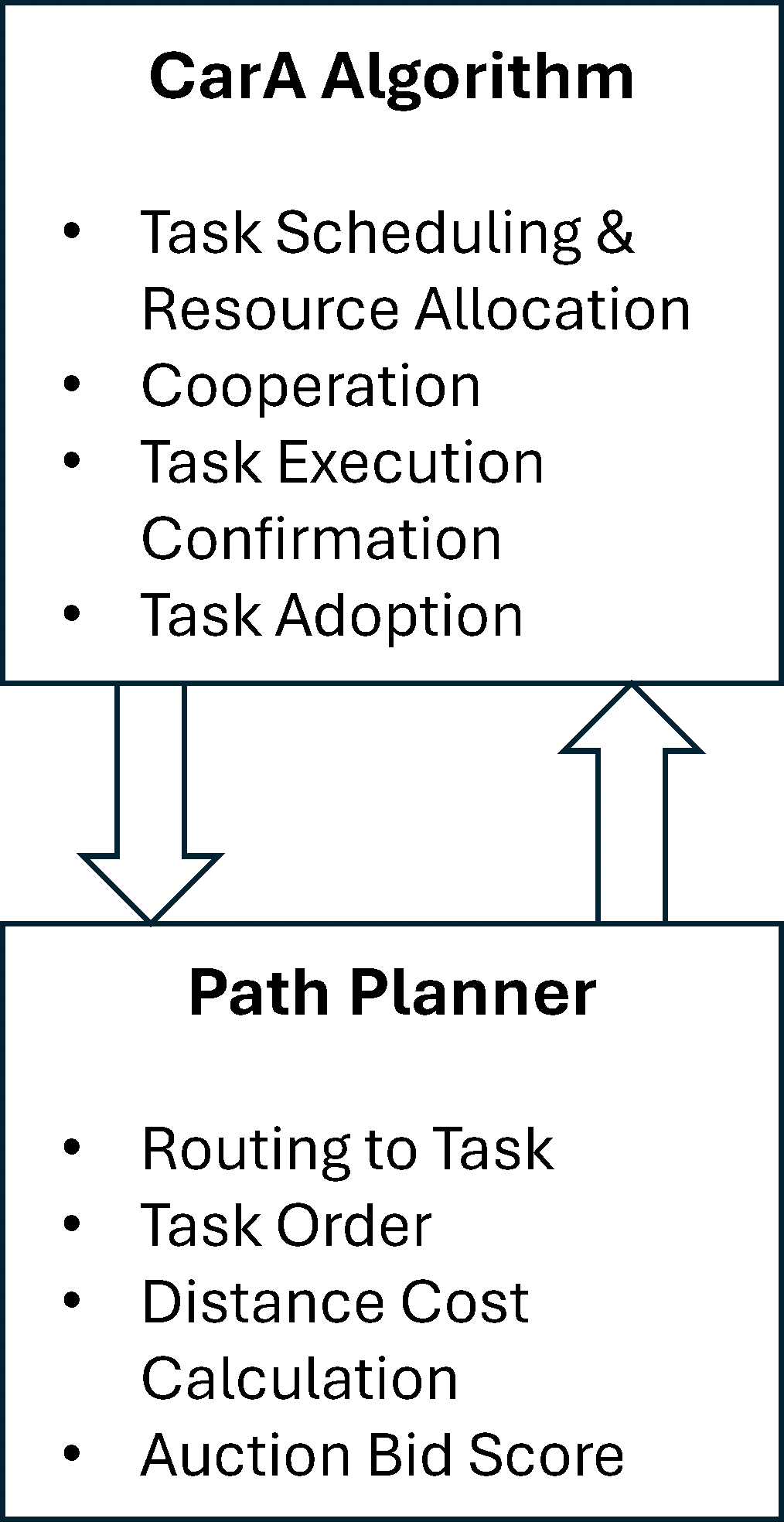
Unmanned aerial vehicle (UAV) systems can fail during civil and military operations. This presents a significant challenge for human teleoperators (remote pilots) in determining task reallocation after member loss within the fleet. To alleviate the high cognitive load on teleoperators in critical situations, a decentralized strategy was developed to resolve the combined task assignment and vehicle routing problems. This Integrated Consensus Framework (ICF) not only solves the combined problem but also adds a unique ability to identify the loss of a vehicle and dynamically reroute agents to abandoned tasks to achieve a satisfactory solution. ICF is a two-tiered approach that combines a novel algorithm, the Caravan Auction (CarA) algorithm, with a path-planning strategy to identify when UAVs are lost and reallocate orphaned tasks. The CarA Algorithm consists of three phases: auction, consensus, and validation phases. An experiment using Monte Carlo simulations was conducted to determine the performance of ICF. Teleoperators assigned to complete multiple tasks with UAVs in dangerous environments can allow the proposed system to perform task assignments and reallocation while offering only supervisory control as needed. The results indicate this novel approach provides comparable performance to existing strategies, doing so with the addition of randomized UAV loss.
This study focuses on designing and testing a formation guidance system for a UCAV as a wingman to an F-16 fighter jet. A critical assessment of the UCAV autopilot revealed areas for improvement, which were addressed to refine the stable foundation of the autopilot for implementing the guidance system. This system uses PID controllers to minimise the along-track, cross-track, and vertical-track errors during standard manoeuvres. The system performed exceptionally well in the vertical (z) direction but showed robustness challenges in the along-track (x) and cross-track (y) directions under wind disturbances. A notable outcome was the identification of a novel mathematical relationship between the along-track offset command and its gains, offering a pathway for advanced formation systems. These findings pave the way for future enhancements in diverse formation operations.
This study evaluates the Interacting Multiple Model Adaptive Robust Kalman Filter (IMM-ARKF) for accurate position estimation in a leader-follower swarm of nine drones, consisting of one leader and eight followers following distinct trajectories. The evaluation is conducted under hybrid noise conditions combining Gaussian and Student’s t-distributions at 10%, 30%, and 50% ratios. The IMM-ARKF, which relies solely on its adaptive robust filtering mechanism, is compared with standard Interacting Multiple Model Kalman Filter (IMM-KF) and Extended Kalman Filter (IMM-EKF) methods. Simulations show that IMM-ARKF provides better accuracy, reducing root mean square error (RMSE) by up to 43.9% compared to IMM-EKF and 34.9% compared to IMM-KF across different noise conditions, due to its ability to adapt to hybrid noise. However, this improved performance comes with a computational cost, increasing processing time by up to 148% compared to IMM-EKF and 92.1% compared to IMM-KF, reflecting the complexity of its adaptive approach. These results demonstrate the effectiveness of IMM-ARKF in enhancing navigation accuracy and robustness for multi-drone systems in challenging environments.
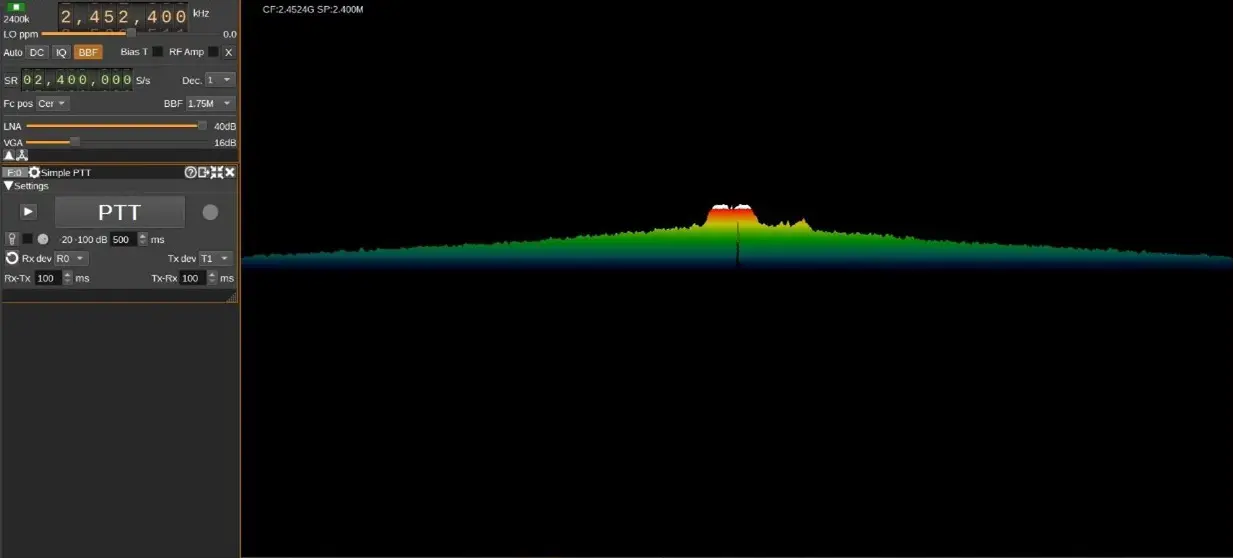
The increasing use of wireless technologies in many aspects of people’s lives has led to a congested electromagnetic spectrum, making it critical to manage the limited available spectrum as efficiently as possible. This is particularly important for military activities such as electronic warfare, where jamming is used to disrupt enemy communication, self-attacking drones, and surveillance drones. However, current detection methods used by armed personnel, such as optical sensors and Radio Detection and Ranging (RADAR), do not include Radio Frequency (RF) analysis, which is crucial for identifying the signals used to operate drones. To combat security vulnerabilities posed by the rogue or unidentified transmitters, RF transmitters should be detected not only by the available data content of broadcasts but also by the physical properties of the transmitters. This requires faster fingerprinting and identifying procedures that extend beyond the traditional hand-engineered methods. In this paper, RF data from the drones’ remote controller is identified and collected using Software Defined Radio (SDR), a radio that employs software to perform signal-processing tasks that were previously accomplished by hardware. A deep learning model is then provided to train and detect modulation strategies utilized in drone communication and a suitable jamming strategy. This paper overviews Unmanned Aerial Vehicles (UAV) neutralization, communication signals, and Deep Learning (DL) applications. It introduces an intelligent system for modulation detection and drone jamming using Software Defined Radio (SDR). DL approaches in these areas, alongside advancements in UAV neutralization techniques, present promising research opportunities. The primary objective is to integrate recent research themes in UAV neutralization, communication signals, and Machine Learning (ML) and DL applications, delivering a more efficient and effective solution for identifying and neutralizing drones. The proposed intelligent system for modulation detection and jamming of drones based on SDR, along with deep learning approaches, holds great potential for future research in this field.
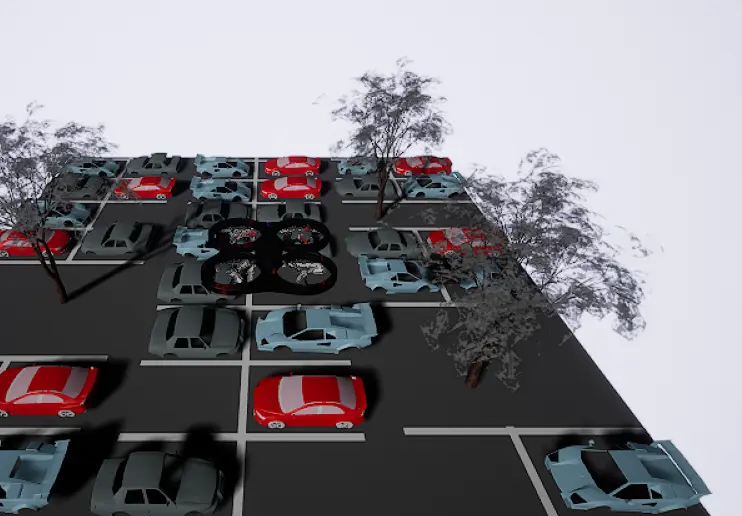
Unmanned aerial vehicles (UAVs) have increased in popularity for several diverse applications over the past few years. Parking, especially in crowded parking lots, can be very time-consuming, as a driver must manually search for vacant spaces among many occupied ones. In this work, reinforcement learning—a category of machine learning in which an agent receives inputs from the environment while outputting actions in order to maximize reward—was utilized in tandem with AirSim, a drone simulator developed by Microsoft, to automate a virtual UAV’s movement. A convolutional neural network (CNN) was then utilized to detect both vacant and filled parking spots, which achieved 98% recall and 93% accuracy. Unreal Engine was used to create a custom environment that resembled a parking lot, and the virtual drone was trained using a Deep Q-Network (DQN). The DQN achieved a mean reward of 394.5 in training and 460.4 in evaluation. A pre-trained CNN integrated with the DQN enables the real-time classification of vacant/occupied parking spaces from drone imagery. Results validate the effectiveness of combining reinforcement learning navigation with CNN image classification, demonstrating deployment-ready performance for real-world congested parking applications.