This paper, intended for expert and non-expert audiences, evaluates the technical and regulatory requirements for Unmanned Aerial Systems (UAS) to operate beyond visual line of sight (BVLOS) services. UAS BVLOS operations have the potential to unlock value for the industry. However, the regulatory requirements and process can be complex and challenging for UAS operators. The work explored the BVLOS regulatory regime in the UK, Europe and the US and found similarities in process and requirements covering themes like Detect and Avoid (DAA), Remote identification and Reliable Connectivity. A unifying goal across these jurisdictions is to operate BVLOS safely and securely in non-segregated airspace. However, operating BVLOS in segregated airspace as the default or routine mode could accelerate approval and adoption. The paper reviewed existing challenges, highlighting Coverage, Capacity and Redundancy as critical for UAS BVLOS Operations. The work also highlighted the crucial role of Non-terrestrial Network (NTN) assets like Satellites and HAPS (High Altitude Platform Station) since terrestrial networks (not optimised for aerial platform coverage) may not be reliable for BVLOS connectivity.
Amid a global metacrisis of health, environmental and economic challenges, medical delivery drones (or uncrewed aerial vehicles) offer a promising method to prepare for, and rapidly respond, to future emergencies. This opinion article summarizes the current medical delivery drone landscape, evidence base, and policy implications in the context of public health emergencies, such as pandemics, natural disasters, and humanitarian crises, with a particular emphasis on the region of sub-Saharan Africa. Using a multilateral, international health policy perspective, key challenges and opportunities, such as the development of sustainable funding mechanisms, robust regulatory frameworks, and capacity building, are identified.
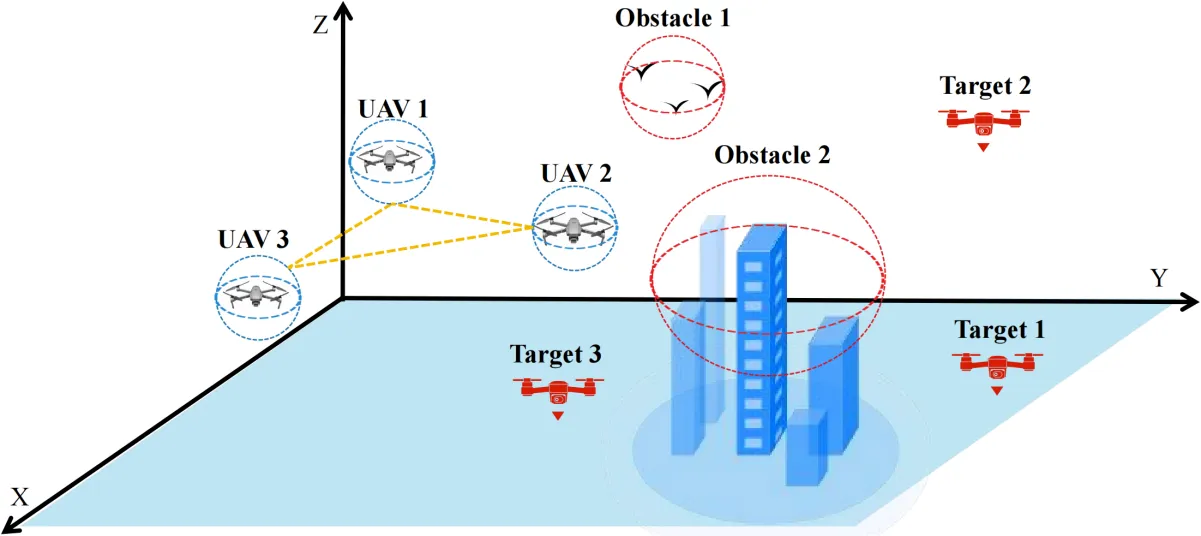
This paper proposes a distributed reinforcement learning method for multi-robot cooperative target search based on policy gradient in 3D dynamic environments. The objective is to find all hostile drones which are considered as targets with the minimal search time while avoiding obstacles. First, the motion model for unmanned aerial vehicles and obstacles in a dynamic 3D environments is presented. Then, a reward function is designed based on environmental feedback and obstacle avoidance. A loss function and its gradient are designed based on the expected cumulative reward and its differentiation. Next, the expected cumulative reward is optimized by a reinforcement learning algorithm that makes the loss function update in the direction of the gradient. When the variance of the expected cumulative reward is lower than a specified threshold, the unmanned aerial vehicle obtains the optimal search policy. Finally, simulation results demonstrate that the proposed method effectively enables unmanned aerial vehicles to identify all targets in the dynamic 3D airspace while avoiding obstacles.
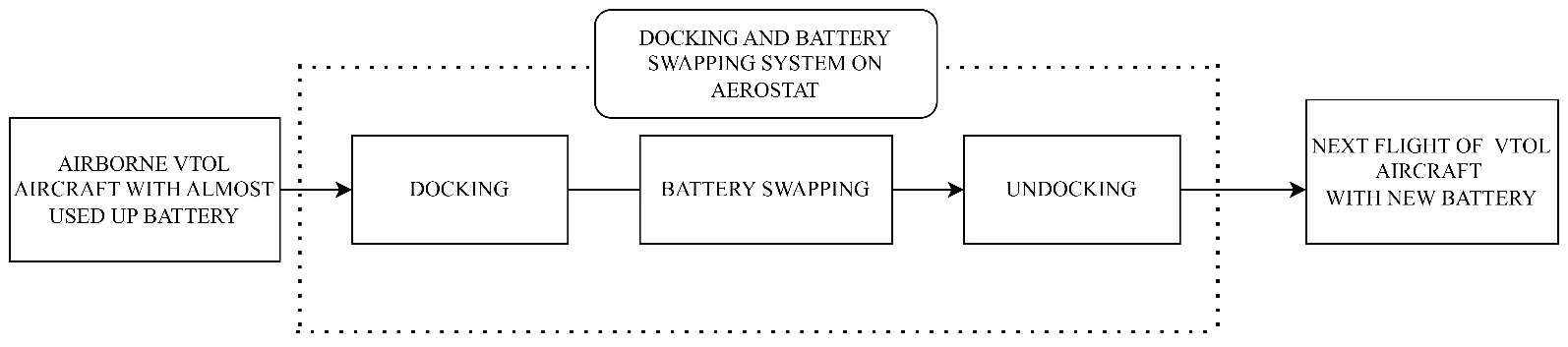
In response to the ever-growing global demand for Unmanned Aerial Vehicles, efficient battery solutions have become vital. This paper proposes a design and concept of an Autonomous Mid Air Battery Swapping System for Vertical Take-Off and Landing Unmanned Aerial Vehicles. The proposed design integrates Aerial Mechatronics, Lighter than Air Systems, and Digital Modelling by leveraging the innovative concept of aerostats for battery swapping. This adaptive and effective technology paves the way for the next generation of autonomous Vertical Take-Off and Landing, ensuring a longer flight time and range. Modern-day technologies have empowered Unmanned Aerial Vehicles to operate autonomously and be remotely controlled, expanding their utility across diverse industries. The enhanced Vertical Take-Off and Landing capabilities include the ability to dock on an aerostat-mounted system, facilitating seamless battery swapping without human intervention and ensuring extended flight duration and operational flexibility. These advancements promise to broaden the applications of Unmanned Aerial Vehicles across various industries.
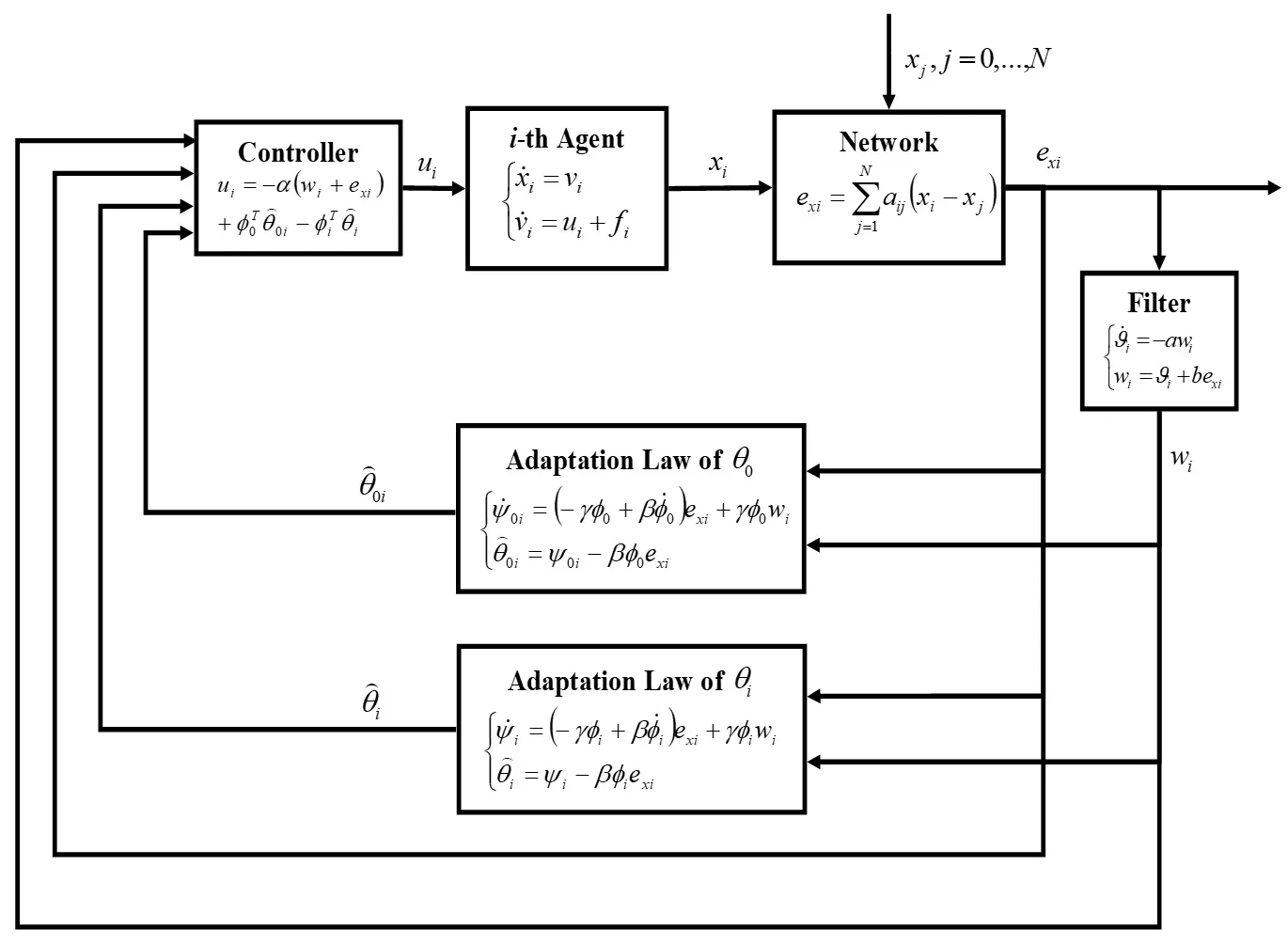
In this paper, the distributed leader-follower consensus of a group of agents with second-order dynamics under the undirected graph communication topology is studied. The main objective of this study is to solve a major practical multi-agent problem in which the acceleration of the leader is not communicated to each follower. In contrast, the follower agents include some unknown dynamics in their intrinsic structure. By assuming a linear regression structure for leader acceleration and agent’s unknown dynamics, Lyapunov-based adaptive control algorithms are devised to control the network of agents in the presence of the communication loss and modeling uncertainties. The presented study describes two multi-agent control strategies called fully-distributed adaptive control (FDAC) and partially-distributed adaptive control (PDAC) systems in the first method, the followers do not have any a priori information about the communication graph, while in the second method, some information about the eigenvalues of the communication graph is available. The mathematical manipulations required to prove the stability of the FDAC and PDAC methods are presented. Finally, illustrative simulations are conducted to render the proposed algorithms’ merits and efficiencies.