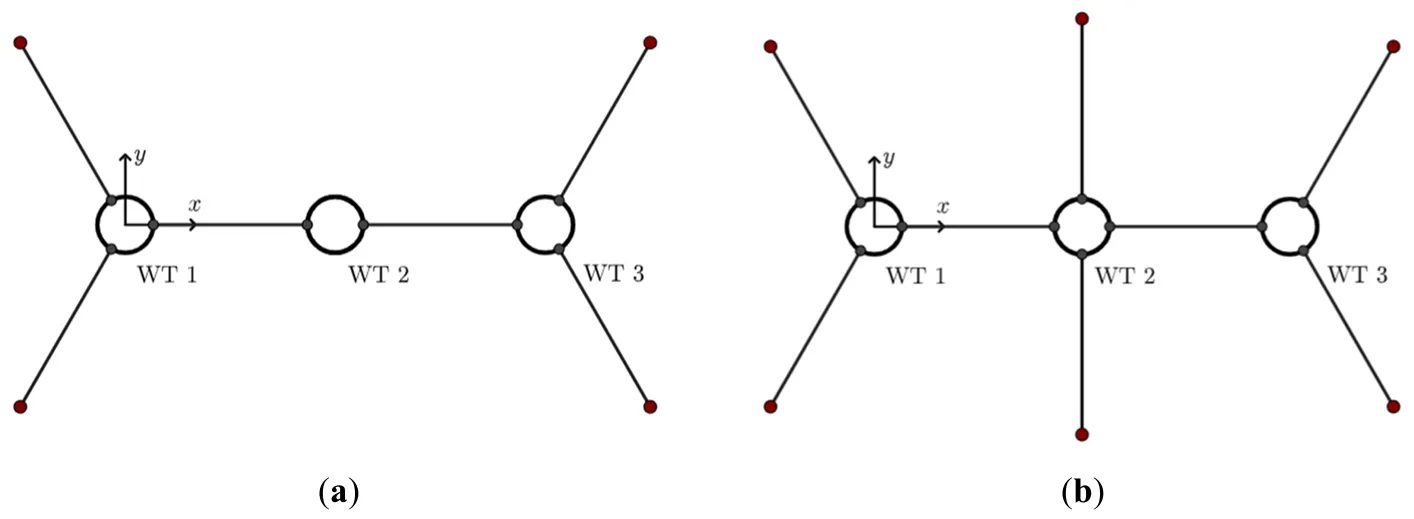
The effects of shared mooring in offshore wind farms are investigated through numerical simulations in the present study. Different farm layouts are modelled and tested in SIMA coupled dynamic analysis software with three and four floaters. The wind turbine and the platform are based on the OC3 project from NREL: a 5-MW wind turbine and a spar floater with a 120-m draft. The water depth is 320 m, and the environmental loads are defined for an average operational condition. Firstly, the static results of the mooring line tension at the fairleads and anchors from the numerical model are compared with the values from the open-source MoorPy code. Then, domain simulations are conducted for three hours, and the dynamic behaviour of the floaters is analysed with a focus on surge and pitch motions. In addition, the dynamic stiffness effects of the polyester in the shared mooring line are considered in the SIMA simulations. The mooring line tensions are analysed, determining the global maximum tension across all systems. Results show that designs with two windward legs have significantly lower anchor mooring line tensions than those with a single windward leg, with no relevant variation in platform surge and pitch. Thus, the former systems are preferable for further investigation.
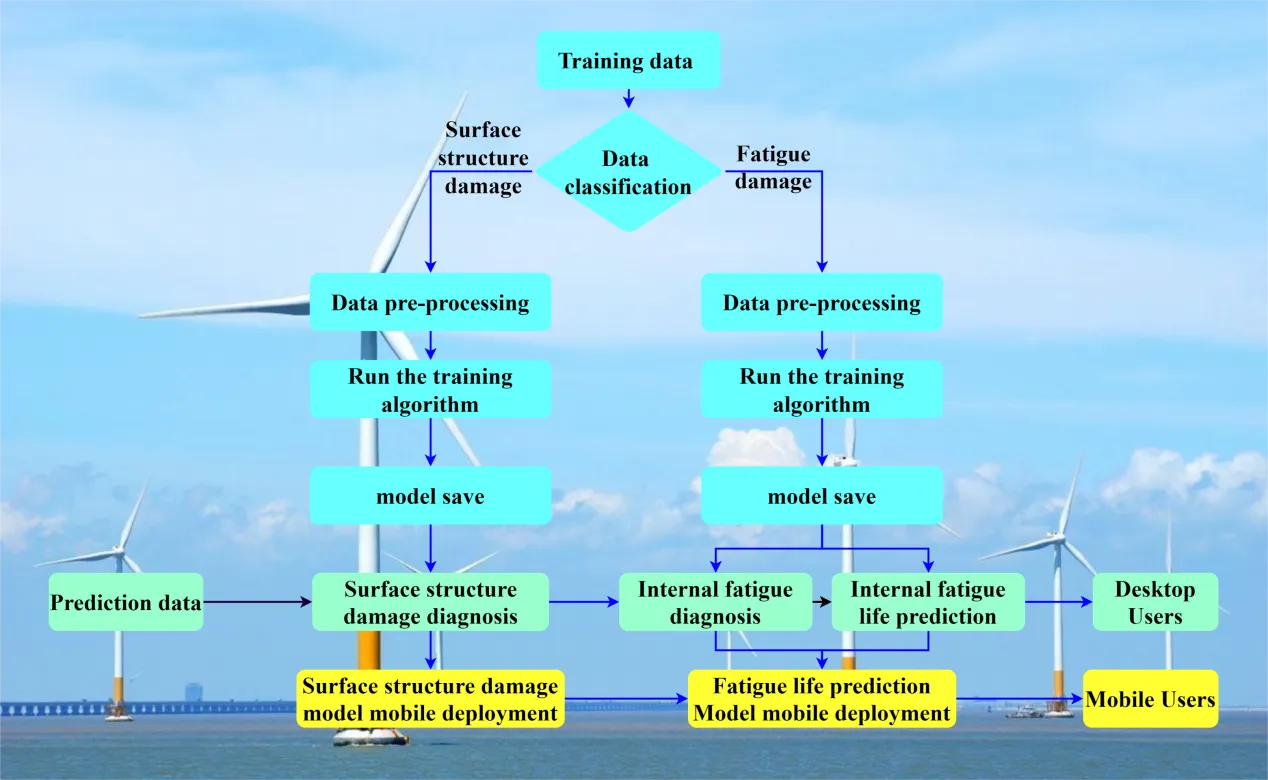
Global offshore wind capacity has now surpassed 50 GW and is projected to reach 264 GW by 2050, highlighting the pivotal role of floating wind in the future of clean energy. Given the complexity of marine environments, intelligent diagnostics for floating turbines are crucial for improving operational efficiency, reducing costs, and ensuring robust and sustainable energy production. This paper presents a structural damage detection framework for floating wind turbines, integrating computer vision with advanced artificial intelligence technologies. First, a dataset is constructed through industry collaboration and open-source collection. Then, to optimise the YOLOv7 algorithm, SE attention mechanisms and WISE-IoU loss functions are incorporated, which significantly enhance the accuracy of surface damage detection. Experimental results indicate that the mAP (mean Average Precision) increases from 82.44% to 86.24% compared to the original YOLOv7. Finally, a deployment approach and an example are provided to use the diagnostic framework as a portable application. This enables real–time on–site analysis, enhances detection timeliness, and reduces maintenance costs. It allows for immediate issue identification and adaptation to diverse environments.
As wind energy continues to be deployed at a significantly increasing rate, the number of decommissioned wind turbines is expected to increase accordingly. To improve material efficiency, a large amount of waste requires appropriate identification and recycling, particularly the composite materials used in wind turbine blades (WTB). This study focuses on two life cycle stages, manufacturing and the decommissioning stage, which contribute most to the waste generation of WTB. This study investigates the material efficiency factors in WTB and organises fragmental information in manufacturing waste management, focusing on the recycling factor and quantifying the recyclability of wind turbine blade material regarding the different recycling technologies. This study fills the gap in existing research by evaluating recycling methods for specified carbon fibre-reinforced polymers (CFRPs) and glass fibre-reinforced polymers (GFRPs) using a revised recyclability index. Additionally, innovative sustainable materials and recent composite recycling studies have also been incorporated into the quantification and evaluation to update the current progress. The current source of WTB post-production waste, the corresponding disposal method, and opportunities were also reviewed and identified. The findings quantified recyclability and revealed that the recyclability of WTB materials varies significantly depending on the specific composite type and the recycling method employed. Furthermore, the calculated recyclability, combined with other factors such as global warming potential (GWP), cost, and technology readiness level (TRL), is discussed, along with the potential for improving material efficiency by selecting future material recycling technology and effective manufacturing waste management.
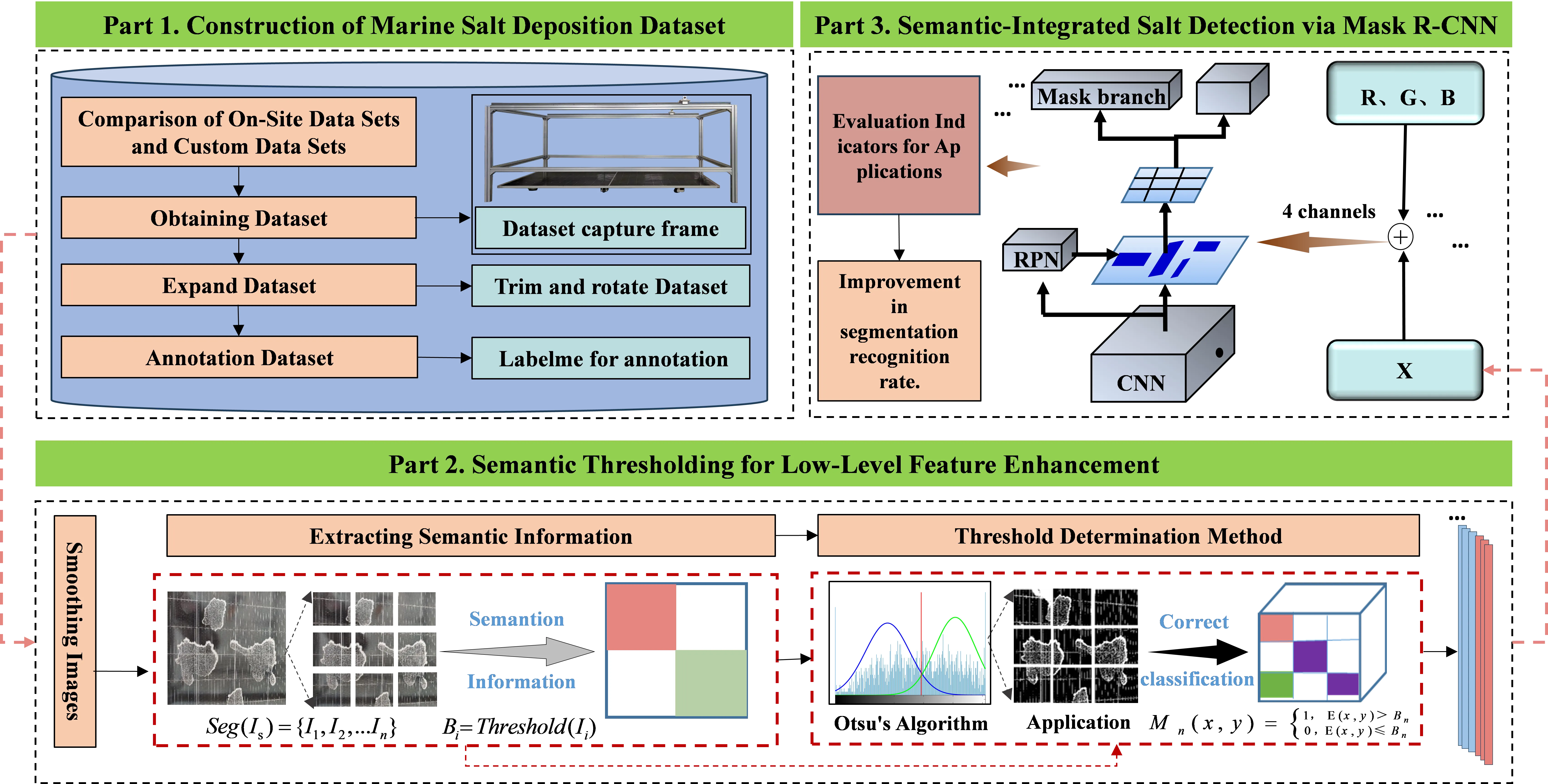
Offshore floating photovoltaic systems are highly susceptible to salt crystallization on the surfaces of photovoltaic modules, highlighting the need for intelligent inspection and cleaning technologies to improve operational efficiency and overcome the limitations of conventional manual maintenance methods. However, the presence of surface gridlines on the photovoltaic modules introduces significant visual interference, which complicates the accurate identification of salt deposition regions. To address this challenge, a semantic information-guided detection framework is proposed to enable precise segmentation of salt-affected areas. The key innovation lies in the effective classification of gridlines as background features by extracting semantic priors through low-level thresholding, which are then fused with the original red-green-blue image to construct a four-channel input. This fusion enhances the model’s ability to extract and discriminate features related to salt crystallization. Experimental results demonstrate that the proposed method achieves a 4.6% improvement in segmentation accuracy and a 3.7% increase in recognition accuracy compared to conventional models, based on evaluation metrics such as mean average precision and F1-score. The proposed framework offers a robust technical foundation for developing intelligent maintenance systems tailored to offshore floating photovoltaic applications.