Deadline for manuscript submissions: 15 January 2024.


Drones, or unmanned aerial vehicles (UAVs), are increasingly utilized across diverse fields such as agriculture, environmental analysis, and engineering due to their ability to capture high-quality multispectral imagery. To ensure the accuracy of these images, radiometric calibration of onboard multispectral cameras is essential. This study aimed to develop and calibrate a low-cost Lambertian surface using barium sulfate (BaSO4) for radiometric calibration of UAV-mounted multispectral cameras. A stainless steel mold was designed to compact BaSO4, and the resulting surface was calibrated using an ASD FieldSpec HandHeld UV/NIR spectroradiometer and a Spectralon plate as the reference standard. Results showed a strong correlation (Pearson’s r = 0.9988) between the BaSO4 surface and the Spectralon plate, confirming that the BaSO4-based surface is a cost-effective alternative for producing diffuse Lambertian surfaces with performance comparable to the standard.
The increasing use of wireless technologies in many aspects of people’s lives has led to a congested electromagnetic spectrum, making it critical to manage the limited available spectrum as efficiently as possible. This is particularly important for military activities such as electronic warfare, where jamming is used to disrupt enemy communication, self-attacking drones, and surveillance drones. However, current detection methods used by armed personnel, such as optical sensors and Radio Detection and Ranging (RADAR), do not include Radio Frequency (RF) analysis, which is crucial for identifying the signals used to operate drones. To combat security vulnerabilities posed by the rogue or unidentified transmitters, RF transmitters should be detected not only by the available data content of broadcasts but also by the physical properties of the transmitters. This requires faster fingerprinting and identifying procedures that extend beyond the traditional hand-engineered methods. In this paper, RF data from the drones’ remote controller is identified and collected using Software Defined Radio (SDR), a radio that employs software to perform signal-processing tasks that were previously accomplished by hardware. A deep learning model is then provided to train and detect modulation strategies utilized in drone communication and a suitable jamming strategy. This paper overviews Unmanned Aerial Vehicles (UAV) neutralization, communication signals, and Deep Learning (DL) applications. It introduces an intelligent system for modulation detection and drone jamming using Software Defined Radio (SDR). DL approaches in these areas, alongside advancements in UAV neutralization techniques, present promising research opportunities. The primary objective is to integrate recent research themes in UAV neutralization, communication signals, and Machine Learning (ML) and DL applications, delivering a more efficient and effective solution for identifying and neutralizing drones. The proposed intelligent system for modulation detection and jamming of drones based on SDR, along with deep learning approaches, holds great potential for future research in this field.
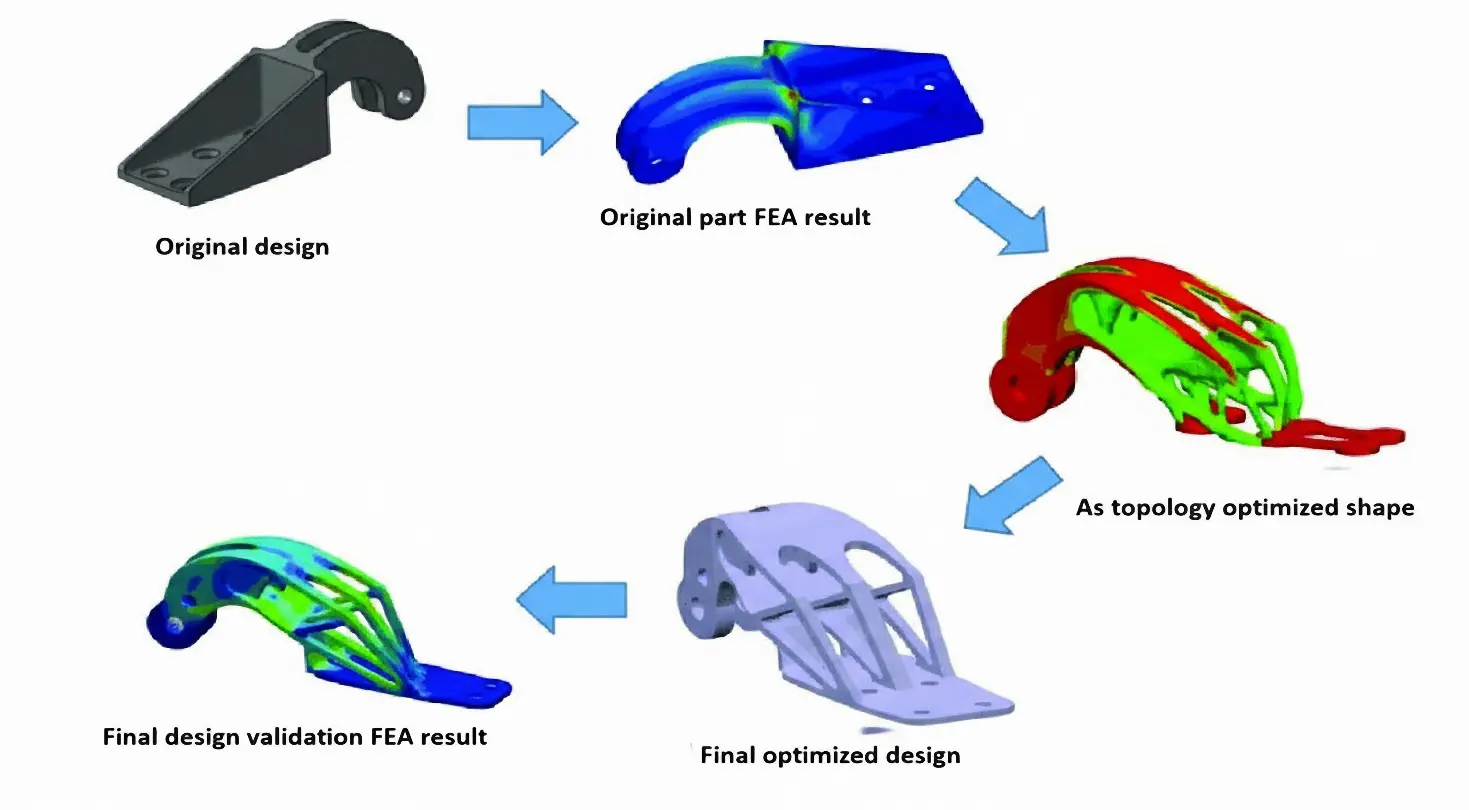
Payload drones are often limited more by frame weight than by motor power. This work aims to design, optimize, and validate a flat octocopter frame with eight independently driven rotors arranged symmetrically on separate arms. The drone frame design in SOLIDWORKS uses Finite Element Analysis (FEA) and topology optimization to remove material from low-stress regions while keeping the main load paths intact. The final design cuts the frame mass by 37.3% compared to the baseline model and reduces the 3D printing time by about five hours using a Creality K1C printer with Polylactic Acid (PLA) filament. These changes increase the available thrust-to-weight margin for payload without exceeding the allowable stress or deformation limits of the material. The electronic components also identified compatible flight controllers, ESCs, motors, and radio systems to show that the proposed frame can be integrated into a complete multirotor platform. Overall, this work demonstrates a practical approach to designing lighter octocopter frames that are easier to 3D print and can be used more effectively for delivery and inspection missions.
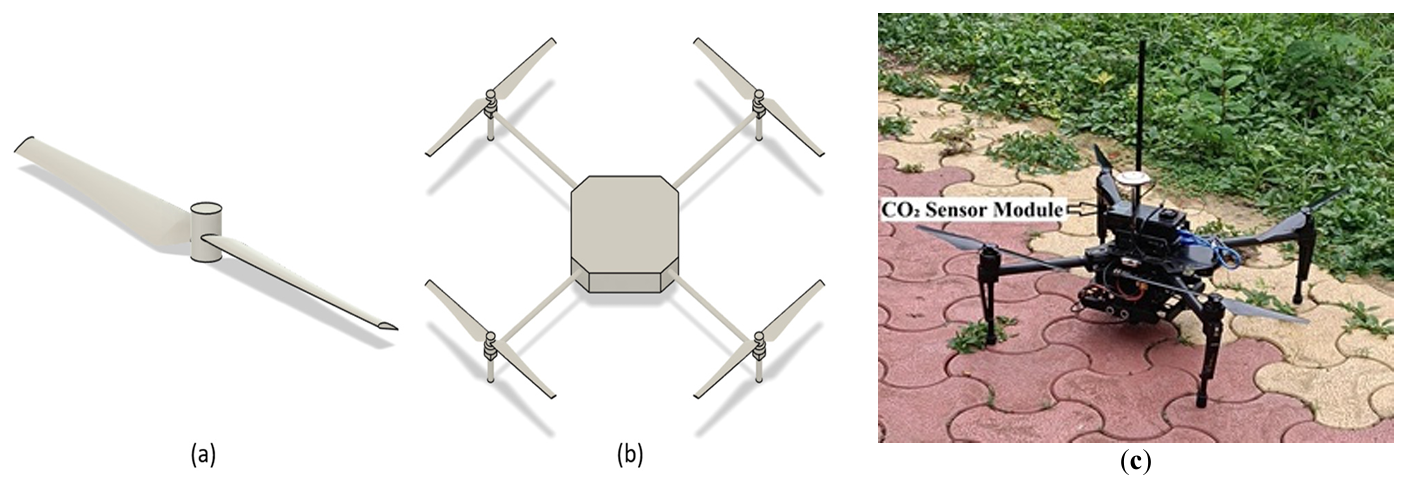
Recent advancements in unmanned aerial vehicle (UAV) technology have enabled flexible, high-resolution monitoring of atmospheric CO2, particularly in complex or otherwise inaccessible environments. This study employs Computational Fluid Dynamics (CFD) to investigate the downwash flow field of a quadcopter UAV in hover condition with the objective of identifying low-disturbance regions suitable for accurate atmospheric sensor placement. A quadcopter model was simulated using the SST k-ω turbulence model. Simulations were performed at rotor speeds ranging from 1000 to 6000 rpm. Results show that the strongest downwash and turbulence occur directly beneath the rotors, while airflow above the central fuselage and regions laterally distant from the rotors remain significantly calmer. The findings strongly recommend placing gas sensors either above the drone body or sufficiently far horizontally from the rotor plane to minimize measurement errors caused by propeller-induced flow.
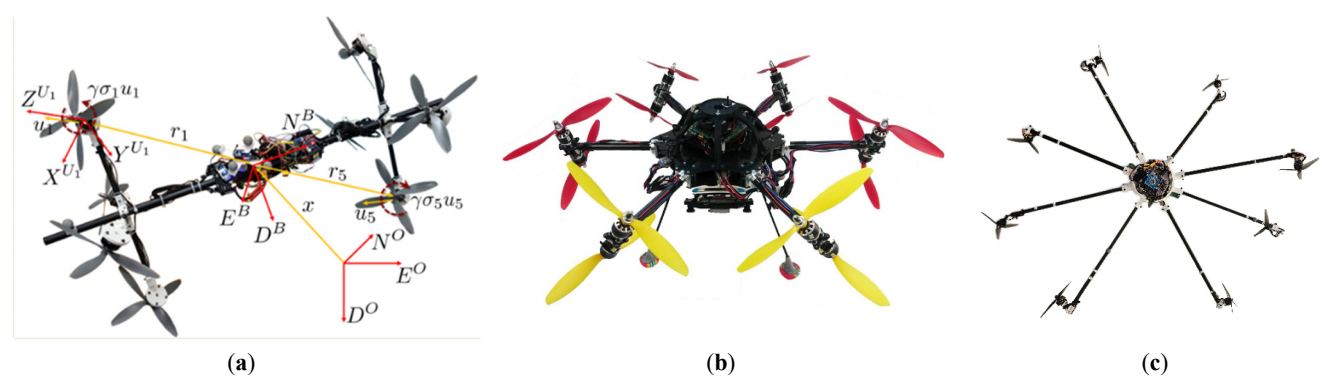
Thrust-vectoring UAVs can realize decoupling of position and attitude compared with conventional quadrotors due to the ability to change thrust direction, and are used to perform various complex indoor and outdoor missions. However, existing trajectory generation frameworks are mostly for quadrotors with fixed thrust direction and a coplanar surface, and do not consider the dynamics of thrust-vectoring UAVs. To address this, this paper proposes a multi-objective trajectory generation method for thrust-vectoring UAVs in constraint space. By parametrically modeling the constraint space, the method considers the effects of environmental boundary constraints and platform dynamics characteristics on the collision constraints and motion decoupling of the trajectory, and comprehensively optimizes the trajectory’s indicators of stability, speed, and safety to plan the states and input actions of the flight trajectory. Meanwhile, a trajectory generation evaluation system is proposed, given that compared with the conventional quadratic objective function, the proposed method is effective in reducing the attitude change of the trajectory, improving the rapidity and safety, in which $$L_{\theta}$$ and $$L_{r i s k}$$ are reduced by 70.4% and 19.1%, respectively. Meanwhile, by comparing with the conventional quadrotor, the advantages of the thrust-vectoring in decoupling motion are quantified, especially in reducing the attitude change during flight, the pitch angle of the generated trajectory is reduced from ±30° to within ±20° degrees, which exerts the motion decoupling advantages of the thrust-vectoring.
Acoustic waves can affect two important components of multi-rotor drones, more formally called multi-rotor unmanned aerial vehicles (UAV). The first is located in the electronic board, the so-called IMU (Inertial Measurement Unit), which can be influenced by intense sound waves at resonant frequency. The second is the motor-propeller unit of drones. Multi-rotor drones generate low-frequency acoustic emissions during flight; if external acoustic waves achieve resonance with these blade-induced vibrations, they can cause structural fatigue or mechanical failure in the motor-propeller unit. The paper addresses the following issues: first, the influence of resonant frequency sound waves on these two design elements and their performance evaluation; second, the feasibility of an integrated counter-UAV system comprising acoustic Direction of Arrival (DoA) estimation and Blade Passage Frequency (BPF) detection; and third, a new solution for a long-range directional sound effector. This proposed solution includes determining the operating frequency as the 3rd to 5th harmonics of the BPF. Furthermore, it introduces a new concept that, instead of using a standard array of sound drivers, utilizes a limited quantity of powerful drivers arranged skeletally according to a Vicsek fractal topology. This configuration generates a powerful, needle-like acoustic beam capable of delivering effective mechanical disruption multi-rotor drones at long ranges.