While aerial photography continues to play an integral role in forest management, its data acquisition can now be obtained through an unmanned aerial vehicle (UAV), commonly referred as a drone, instead of conventional manned aircraft. With its feasibility, a drone can be programed to take off, fly over an area following predefined paths and take images, then return to the home spot automatically. When flying over forests, it requires that there is an open space for a vertical takeoff drone to take off vertically and return safely. Hence, the automatic return-to-home feature on the drone is crucial when operating in a woodland landscape. In this project, we assessed the return-to-home landing accuracy based on a permanently marked launch pad nested in a wooded area on the campus of Stephen F. Austin State University in Nacogdoches, Texas. We compared four models of the DJI drone line, with each flown 30 missions over multiple days under different weather conditions. When each drone returned to the home launch spot and landed, the distance and direction from the launch spot to the landing position was measured. Results showed that both the Phantom 4 Advanced and the Spark had superior landing accuracy, whereas the Phantom 3 Advanced was the least accurate trailing behind the Phantom 4 Pro.

This paper presents, an autonomous and scalable monitoring system for early detection and spread estimation of wildfires by leveraging low-cost UAVs, satellite data and ground sensors. An array of ground sensors, such as fixed towers equipped with infrared cameras and IoT sensors strategically placed in areas with a high probability of wildfire, will work in tandem with the space domain as well as the air domain to generate an accurate and comprehensive flow of information. This system-of-systems approach aims to take advantage of the key benefits across all systems while ensuring seamless cooperation. Having scalability and effectiveness in mind, the system is designed to work with low-cost COTS UAVs that leverage infrared and RGB sensors which will act as the primary situational awareness generator on demand. AI task allocation algorithms and swarming-oriented area coverage methods are at the heart of the system, effectively managing the aerial assets High-level mission planning takes place in the GCS, where information from all sensors is gathered and compiled into a user-understandable schema. In addition, the GCS issues warnings for events such as the detection of fire and hardware failures, live video feed and lower-level control of the swarm and IoT sensors when requested. By performing intelligent sensor fusion, this solution will offer unparalleled reaction times to wildfires while also being resilient and reconfigurable should any hardware failures arise by incorporating state of the art swarming capabilities.
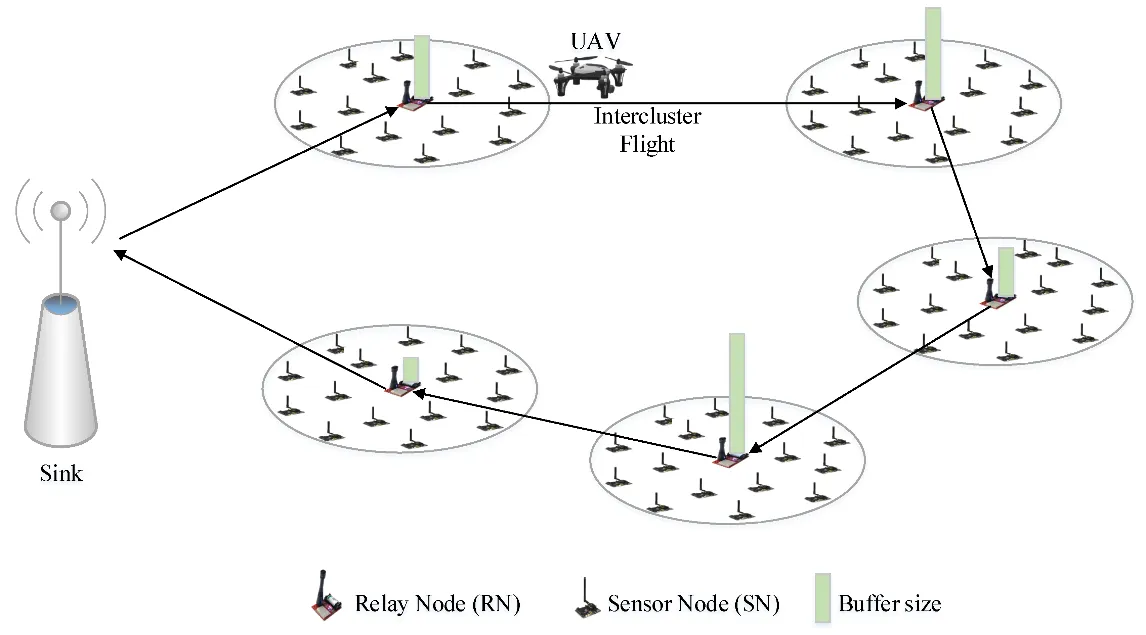
We consider a remote sensing system in which fixed sensors are placed in a region, and a single drone flies over the region to collect information from cluster heads. We assume that the drone has a fixed maximum range and that the energy consumption for information transmission from the cluster heads increases with distance according to a power law. Given these assumptions, we derive local optimum conditions for a drone path that either minimizes the total or maximum energy required by the cluster heads to transmit information to the drone. We show how a homotopy approach can produce a family of solutions for different drone path lengths so that a locally optimal solution can be found for any drone range. We implement the homotopy solution in Python and demonstrate the tradeoff between drone range and cluster head power consumption for several geometries. Execution time is sufficiently rapid for the computation to be performed in real time so that the drone path can be recalculated on the fly. The solution is shown to be globally optimal for sufficiently long drone path lengths. A proof of concept implementation in Python is available on GitHub. For future work, we indicate how the solution can be modified to accommodate moving sensors.
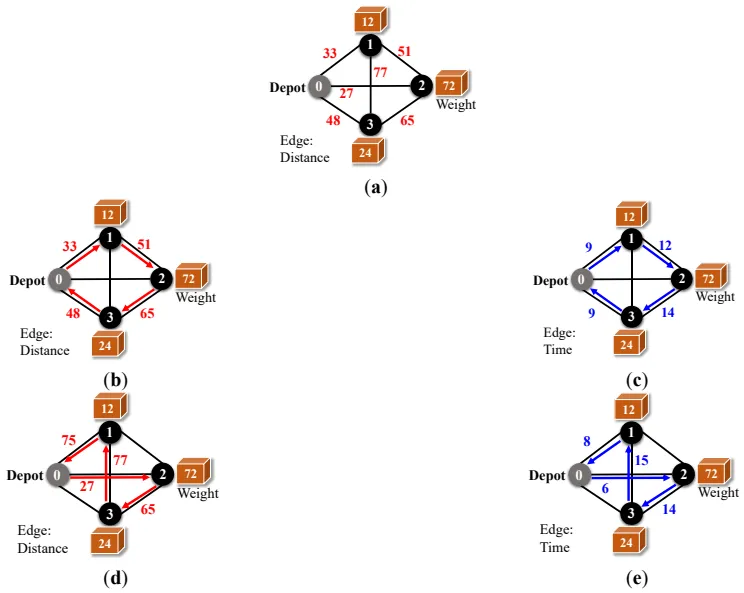
In recent years, there has been a growing interest in utilizing drones for parcel delivery among companies, aiming to address logistical challenges. However, effective optimization of delivery routes is essential. A theoretical framework termed the Flight Speed-aware Vehicle Routing Problem (FSVRP) has emerged to address the variability in drone flight speed based on payload weight. Several approximate methods have been proposed to solve the FSVRP. Our research endeavors to optimize parcel delivery efficiency and reduce delivery times by introducing a novel delivery problem. This problem accounts for multiple deliveries while considering the variability in flight speed due to diverse payloads. Through experimentation, we evaluate the efficacy of our proposed method compared to existing approaches. Specifically, we assess total flight distance and flight time. Our findings indicate that even in cases where the payload exceeds maximum capacity, all parcels can be delivered through multiple trips. Furthermore, employing a multi-trip FSVRP approach results in an average reduction of 10% in total flight time, even when payload capacities are not exceeded.
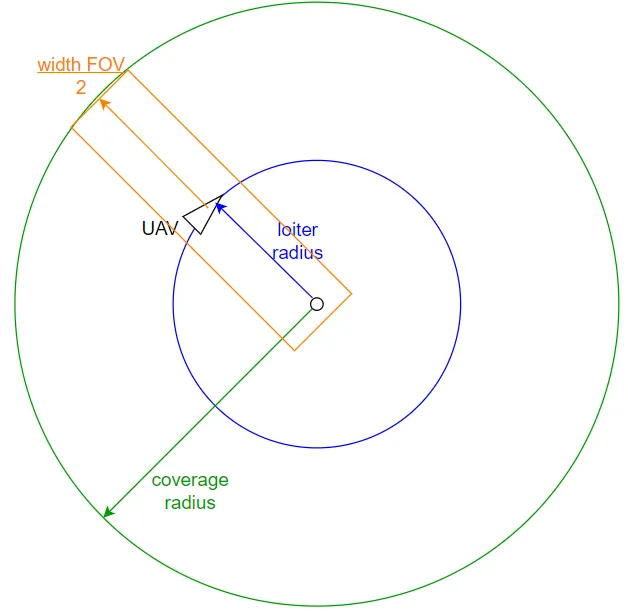
Wildfires have proven to be a significantly exigent issue over the past decades. An increasing amount of research has recently been focused on the use of Unmanned Aerial Vehicles (UAVs) and multi-UAV systems for wildfire monitoring. This work focuses on the development of a decentralized framework for the purpose of monitoring active wildfires and their surrounding areas with fixed wing UAVs. It proposes a distributed fire data update methodology, a new formation algorithm based on virtual forces, fine-tuned by a Genetic Algorithm (GA), to arrange virtual agents into the monitoring area, and a control strategy to safely and efficiently guide fixed wing UAVs to loiter over the structured virtual agents. The system is tested in Software In The Loop (SITL) simulation with up to eight UAVs. The simulation results demonstrate the effectiveness of the system in monitoring the fire in a persistent manner and providing updated situational awareness data. The experiments show that the proposed framework is able to achieve and maintain coverage up to 100% over the area of interest, and very accurate fire representation. However, the performance is decreased for the experiments with low UAV numbers and large fire sizes.