The Future of Environmentally Powered Gliders: Emerging Prospects and Trends

The Future of Environmentally Powered Gliders: Emerging Prospects and Trends
Shuo Zhao 1,2 Runfeng Zhang 1,2,3,* Ruize Pan 1,2 Shishuai Niu 4
Received: 31 December 2025 Revised: 06 March 2026 Accepted: 27 March 2026 Published: 31 March 2026

© 2026 The authors. This is an open access article under the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).
1. Introduction
With the growing global demand for marine resource exploration, environmental monitoring, and security assurance, unmanned underwater vehicles (UUVs) have become core equipment for executing long-term scientific missions. Among these, underwater gliders, with their unique buoyancy-driven propulsion mechanism, achieve low-power consumption and long-range sawtooth gliding movements. They demonstrate irreplaceable application value in both military and civilian fields, including physical oceanography surveys, biogeochemical process observations, and underwater target monitoring [1].
However, the performance of underwater gliders remains fundamentally constrained by one critical factor: energy supply. Endurance, payload power, and mission flexibility all strictly depend on limited onboard energy resources. To establish a quantitative baseline, the control system and steering mechanisms of a typical glider serve as primary power-consuming units, requiring approximately 1.79 W and 5.5 W, respectively [2]. Current mainstream solutions rely on high-energy-density batteries, whose technological advancement faces significant challenges. Despite researchers’ efforts to employ data fusion and multi-objective optimization techniques to maximize energy efficiency [3,4,5] (such as recent studies on “Fixed-time backstepping control of attitude tracking in 3D space for an autonomous underwater glider”, “Event-triggered model predictive control for trajectory tracking of underwater gliders in currents”, “Finite-time prescribed performance with fixed-time disturbance rejection for underwater glider heading control”, and “Fixed-time trajectory tracking control for underwater glider: theory and experiment”) [6,7,8,9] hese optimizations typically yield limited realistic gains—for example, advanced control allocation can reduce the energy consumption for a single diving profile by only about 5.6% (approximately 2.04 kJ) [4]. These optimizations essentially redistribute resources within a fixed energy envelope and cannot overcome the physical upper limit imposed by the battery’s total capacity [10]. Compared to traditional ship-based monitoring and conventional propeller-driven AUVs, underwater gliders already provide an exceptional platform for unattended, extended observation over large spatio-temporal scales. However, to push beyond their current operational envelopes and to support increasingly power-intensive sensor payloads, overcoming the finite nature of onboard battery capacity remains a key developmental frontier.
To overcome reliance on finite stored energy, harnessing abundant, sustainable in-situ renewable energy sources within the marine environment has become imperative. Ocean-based thermal gradients and solar energy theoretically offer nearly limitless propulsion or power replenishment for gliders [11]. Although tidal energy offers highly predictable power, as systematically reviewed in “State-of-the-art review and future trends of development of tidal current energy converters in China” [12,13], the engineering challenges of miniaturizing such systems for gliders remain largely unresolved. Consequently, this review will focus on the more mature solar, thermal, and hybrid platforms. However, any single energy conversion system carries inherent limitations: thermohaline-driven efficiency heavily relies on stable, pronounced vertical thermocline structures. Solar energy harvesting faces severe constraints from diurnal cycles, seasons, weather conditions, and seawater transparency [14]. These spatio-temporal uncertainties make it challenging for gliders reliant on a single energy source to ensure stable, reliable operation across diverse global ocean regions and climatic conditions.
Therefore, hybrid energy systems integrating multiple environmental energy sources and synergizing with energy storage units represent the most promising solution for achieving truly long-term, reliable, and intelligent underwater glider operation. Their core lies in overcoming the intermittency and geographical limitations of single energy sources through multi-source complementarity. For instance, thermoelectric hybrid systems combine thermoelectric engines with batteries to balance ultra-long endurance and high maneuverability. Furthermore, developing comprehensive system models and advanced power management strategies is essential for the effective integration and coordination of multi-energy carriers onboard these platforms [10,15]. Historically, underwater gliders evolved from profiling floats. They fundamentally utilize the same source code and internal firmware, but innovatively leverage the kinetic energy generated by their wings to achieve forward gliding. Building on this shared architecture, significant pioneering work has been conducted in the United States. Notably, Seatrec [16] has successfully developed ocean thermal energy conversion technologies, including the SOLO-TREC platform, to provide persistent power for profiling floats and underwater gliders. Typical environmentally powered underwater gliders are illustrated in Figure 1.
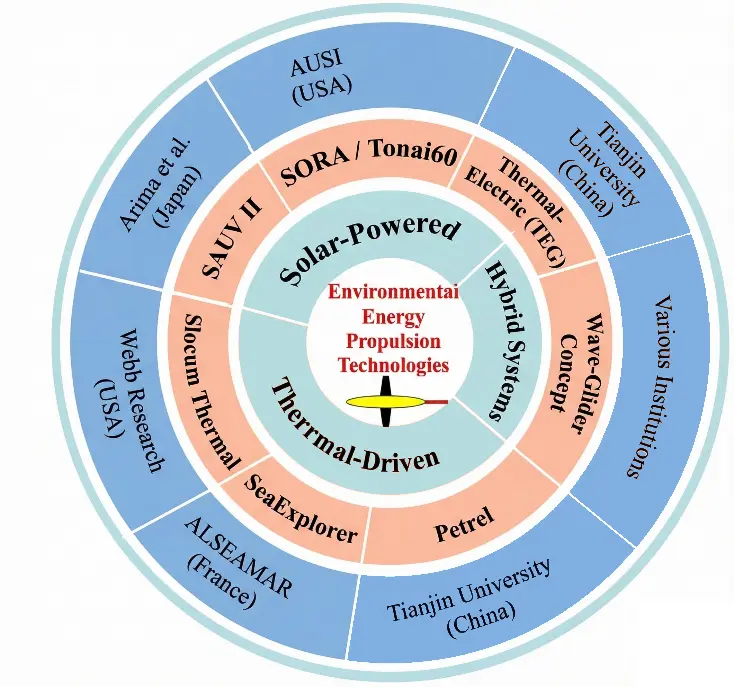
Figure 1. Environmental energy-powered underwater gliders. The concentric circles illustrate the hierarchical classification of current technologies: the inner circle denotes the overarching category of environmental energy propulsion; the middle ring specifies the respective energy source (Solar, Thermal, or Hybrid); and the outer ring identifies representative glider models and their corresponding developing institutions. The concentric circles illustrate the hierarchical classification of current technologies: the inner light-blue ring denotes the energy source, the middle orange ring specifies representative glider models, and the outer dark-blue ring identifies the developing institutions.
This paper systematically summarizes research progress on environmental energy propulsion technologies for underwater gliders. By analyzing the limitations of traditional energy sources and comprehensively reviewing and comparing thermal gradient energy, solar energy utilization schemes, and hybrid system integration strategies, it aims to establish a practical decision-making analysis framework. This framework integrates specific mission requirements with environmental characteristics of operational waters, providing theoretical justification and technical guidance for energy system selection and configuration across diverse application scenarios.
2. Environmental Energy Propulsion Technologies
2.1. Solar-Powered Underwater Gliders
As long-endurance ocean observation platforms, underwater gliders require self-sustaining energy systems and precise motion control—core research areas where technologies have progressed from conceptual exploration to sea trial validation. Regarding energy systems, solar propulsion technologies have undergone long-term marine testing. The inaugural solar-powered unmanned underwater vehicle (SAUV), designated SAUV-I, was jointly developed by the Autonomous Underwater Systems Institute (USA) and the Russian Academy of Sciences. Initial assessments demonstrated that under conditions of 2000 Wh/m2 daily solar irradiance, the system could achieve a daily travel distance of approximately 24 km [17]. Its successor, SAUV II, equipped with a 2 kWh lithium-ion battery and two 85 W solar panels, provided concrete evidence of realistic endurance gains. During a 240-h field test, the vehicle operated continuously for 194 h while requiring only 4 h of dedicated surface charging [18], and also revealed engineering issues, such as battery management system reading accuracy. Foldable or retractable solar charging unit designs effectively balance the requirements for recharging during ascent and reducing drag during deep dives [19]. While early prototypes like SAUV II laid the foundational proof-of-concept for solar propulsion over two decades ago, recent research over the past five years has heavily focused on integrating flexible solar panels, optimizing hydrodynamic profiles, and employing multi-modal locomotion to enhance both energy capture and maneuverability.
Regarding technological advancements and system design, flexible amorphous silicon solar cells demonstrate significant advantages in underwater energy harvesting, achieving conversion efficiencies as high as 59.7% at specific depths (e.g., 2 m) [20]. Research indicates that the red and infrared portions of the underwater spectrum are strongly absorbed, rendering traditional silicon-based cells unsuitable. In contrast, wide-bandgap materials (such as InGaP and amorphous silicon) hold greater potential underwater, enabling higher conversion efficiencies while maintaining power densities greater than 5 mw/cm2 [21]. Furthermore, bifacial photovoltaic modules demonstrate significant performance gains in marine applications. By utilizing reflected surface irradiation, they can increase irradiance exposure by up to 55% compared to monofacial modules on calm water surfaces [22]. In terms of system structural configuration, foldable or retractable solar charging units have become a research focus, aiming to balance the requirements for charging during descent and reducing drag during deep dives. For instance, a novel solar-powered AUV employs a foldable charging unit design: charging panels deploy during descent for gliding, then retract upon reaching operational depth to minimize drag and ocean current effects, thereby enhancing motion stability and depth control performance [19]. Gliders integrating solar power with biomimetic motion modes have also been proposed. The multi-mode submersible glider (SBUG), for instance, combines gliding, paddling, and flapping motions. Its hull is covered with flexible solar cells, extending operational duration and enhancing maneuverability [23]. Table 1 summarizes the key developmental milestones of solar-powered underwater gliders. For energy management, intelligent charging strategies based on maximum power point tracking (MPPT) are widely adopted to optimize photovoltaic panel efficiency and prevent battery overcharging or over-discharging [24]. For multi-AUV collaborative missions, solar-powered systems can integrate with underwater networking protocols to support extended cooperative monitoring and adaptive sampling [25].
Fundamentally, the power availability for these solar-driven platforms is intrinsically linked to total solar irradiance, a critical environmental variable that has been extensively monitored and studied through global satellite missions [26]. To optimize energy harvesting and maneuverability, researchers have continuously refined the structural configurations of solar-powered gliders. For example, the SORA prototype (Figure 2a) maximizes its energy-harvesting area by integrating amorphous silicon solar panels across both its wings and cylindrical hull, while employing externally mounted dual thrusters to enhance navigation control [27]. Building upon these geometric refinements, subsequent models have been intricately tailored for specific observation payloads. A prime example is the Tonai60 (Figure 2b), whose structural schematic highlights a specialized oil-filled hybrid solar panel and an integrated network camera. In practical applications, the Tonai60 successfully operated at depths of 60 m, utilizing these visual and fluorescence identification technologies to enable automated, shallow-water coral monitoring [28]. This demonstrates the efficacy of such solar-powered platforms for shallow-water ecological monitoring.
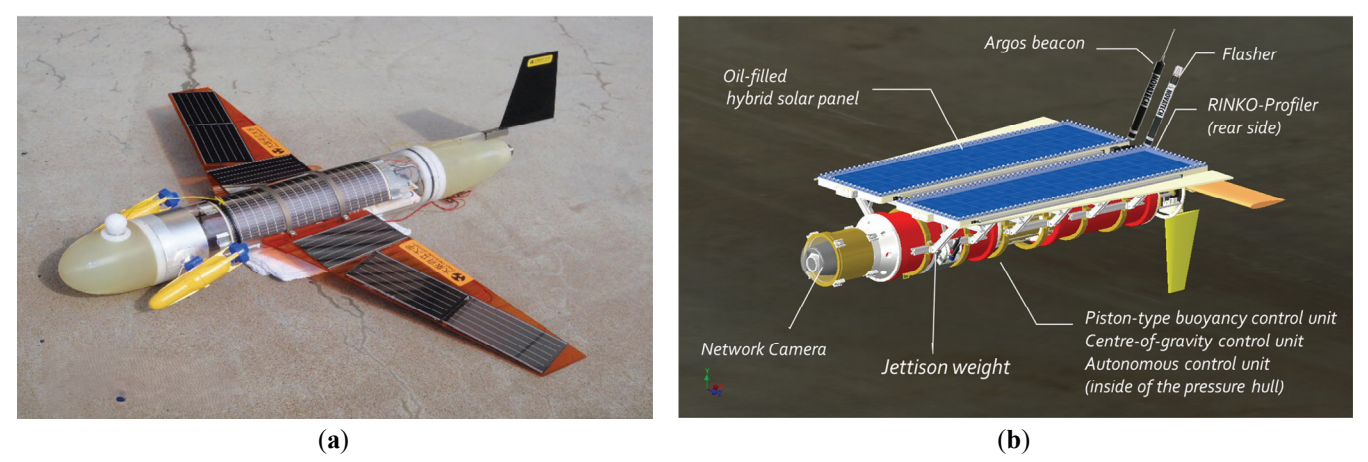
Figure 2. Representative solar-powered underwater gliders. (a) The SORA prototype integrates amorphous silicon solar panels across its wings and hull, utilizing dual thrusters for navigation [28]. (b) The Tonai60 is designed for shallow-water coral monitoring, featuring an oil-filled hybrid solar panel and an integrated network camera for automated fluorescence identification [27].
For passive acoustic monitoring, solar-powered autonomous surface stations (SASVs) can carry underwater acoustic arrays for long-term marine mammal observation and collision avoidance warning [29]. Additionally, field evaluations of a specific solar-powered prototype have revealed several engineering challenges during long-term operations. These include biofouling, reducing solar panel power output to approximately 47% after 30 days, wave interference decreasing energy harvesting efficiency by about 30% under Sea State 3 conditions, and actual system drag coefficients often exceeding design expectations [14]. These findings provide clear directions for subsequent system optimization and technological improvements.
Table 1. Developmental milestones of solar-powered underwater gliders.
|
Year |
Glider Model |
Institution |
Key Features and Highlights |
|---|---|---|---|
|
1997 |
SAUV-I |
AUSI (USA) and RAS (Russia) |
The 90 kg SAUV-I (first solar UUV) with 60 W flat panels and Ni-Cd cells traveled 24 km/day at 2000 Wh/m2, completed 48 dives using two 30 W panels; biofouling reduced output to 47% after 30 days [14,17]. |
|
2003 |
SAUV-II |
AUSI (USA) and RAS (Russia) |
The SAUV-II (32 V/2 kWh Li-ion, 1 m2 solar panels) completed a 30-day endurance test, operating for 194 h with only 4 h of surface charging (>97% duty cycle) [25]. In Narragansett Bay, it measured dissolved oxygen concentrations of 2.4–6.0 mg/L [18,25]. |
|
2011 |
SORA |
Arima et al. |
The SORA (0.7 m, 3.48 kg) incorporated dual thrusters and amorphous silicon solar panels. Under 50,000 lux illumination, it achieved 20 g thrust; charging for 5 min enabled 46 s of gliding [28]. |
|
2013 |
Tonai60 |
Arima et al. |
Designed for coral monitoring; operates at depths up to 60 m. Maximum operating depth of 60 m. Utilizes UV light to excite coral fluorescence for automatic identification. Capable of operating in low-light environments [27]. |
|
2019 |
SBUG |
Northwestern Polytechnical University (China) |
SBUG features flexible solar cells and combines gliding with flapping motions. It achieves a flapping speed of 0.56 m/s and a paddling speed of 0.35 m/s. Dimensions: 650 × 1010 mm, weight: 7.4 kg [23]. |
2.2. Thermal Energy Drives Underwater Gliders
Ocean thermal energy conversion (OTEC) is a renewable energy source that harnesses the stable temperature gradient between surface and deep seawater for energy conversion. Its concept traces back to D’Arsonval’s 1881 proposal [30], with the fundamental principle involving the conversion of temperature differences into mechanical or electrical energy through thermodynamic cycles [31,32]. In tropical and subtropical seas worldwide, surface water temperatures often exceed 25 °C, while depths of 500–1000 m maintain temperatures between 4–8 °C, creating a vertical temperature gradient of approximately 20–25 °C that underpins the application of such technologies [33]. Estimates suggest the global theoretical annual ocean thermal energy reserve is approximately 1.09 × 1019 million Joules (MJ). Assuming a thermal efficiency of 7%, the technically exploitable amount reaches 7.63 × 1017 MJ [34]. Compared to other marine energy forms, thermal energy offers advantages such as strong environmental adaptability and sustained, stable energy supply, making it particularly suitable for powering long-endurance unmanned underwater vehicles [35,36]. However, the system also faces challenges such as low energy conversion efficiency and high material and construction costs [37]. While ocean thermal energy conversion (OTEC) presents a theoretical Carnot efficiency of approximately 6.7%, practical thermodynamic cycles typically achieve lower efficiencies between 2.5% and 5.4% due to the limited 20 °C temperature gradient (typically found between the surface and depths of 500–1000 m) [33,36].
To make the most of the relatively narrow ocean temperature gradient, the energy conversion process in these systems strictly follows closed-cycle thermodynamic principles, typically based on the Rankine cycle (as illustrated in Figure 3). In a standard closed-cycle OTEC system (such as the R717 ammonia power cycle, Figure 3b), warm surface seawater is pumped into an evaporator to vaporize a low-boiling-point working fluid (such as ammonia). The resulting high-pressure vapor expands through a turbine, converting thermal energy into mechanical work to drive a generator. Subsequently, the low-pressure vapor enters a condenser, where it is cooled and liquefied by cold deep-ocean water. A pump then pressurizes the liquid working fluid and returns it to the evaporator, completing the cycle.
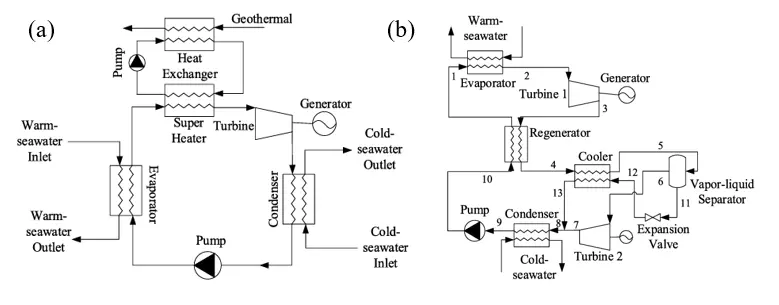
To further overcome the efficiency limits imposed by the small 20 °C ocean temperature difference, advanced configurations like Geo-Ocean Thermal Energy Conversion (Geo-OTEC) introduce supplementary heat sources. By utilizing geothermal energy via a superheater, the temperature and enthalpy of the vaporized working fluid are further elevated before entering the turbine. This hybrid thermodynamic design significantly increases the turbine’s pressure drop and overall work output, providing a robust theoretical foundation for miniaturizing and applying high-efficiency thermal engines to underwater gliders.
At the specific system level for underwater gliders, phase change material (PCM) based conversions have demonstrated a total energy conversion efficiency of 0.396%, where a 6 kg PCM module can generate 6696 J of electrical energy per diving profile [38]. Despite these relatively low conversion rates, the absolute generated power is substantial for low-power gliders. For instance, a dual-tube thermal engine utilizing isostatic pressure techniques achieved an average power output of approximately 124 W and a volumetric change rate reaching 89.2% of its theoretical value during typical diving profiles [37]. The realistic endurance gains enabled by this technology have been robustly validated at sea. In 2013, the Petrel II thermal glider operated continuously for 27 days in the South China Sea, covering a distance of 677 km and successfully completing 113 profile measurements [35,39]. Furthermore, compared to purely electrically driven gliders (EG), which consume 0.2936 J/kg·m, thermal-electric hybrid gliders (TEG) significantly optimize energy economy, achieving a lower unit mass energy consumption of 0.2235 J/kg·m [10].
Phase change material-based thermal energy conversion technology represents one of the most mature and extensively researched approaches to date. Its core principle involves harnessing the volume effect accompanying the solid-liquid phase transition of PCMs during temperature changes to directly drive buoyancy regulation mechanisms [40]. Typically, the system comprises a PCM container, hydraulic oil circuit, and external bladder: in warm surface seawater, PCM absorbs heat, melts, and expands, forcing hydraulic oil into the outer bladder to reduce overall volume. This decreases the vehicle’s net buoyancy, initiating descent. In cold, deep seawater, PCM solidifies and contracts, causing hydraulic oil to flow back and restoring the bladder’s volume. The increased net buoyancy then drives ascent [40]. This process is entirely driven by environmental temperature differences, requiring no onboard battery power consumption, thereby enabling ultra-long endurance operations.
In recent years, research in this field has focused on key materials, thermodynamic modeling, and the optimization of system integration. Regarding materials, composite PCMs have been demonstrated to enhance volumetric change rates and thermodynamic output capabilities significantly [41]. In modeling and simulation, coupled numerical models encompassing phase-change heat transfer, hydraulic transmission, and overall machine motion have been established. These models highlight the dominant role of natural convection in phase-change processes and emphasize the importance of using time-varying boundary conditions in simulations [35,42]. At the system level, thermoelectric hybrid drive architectures combine thermoelectric engines with batteries, preserving the long endurance of pure thermal propulsion while enhancing maneuverability and controllability. Relevant energy consumption models and sea trials demonstrate that such hybrid systems exhibit favorable energy efficiency across various sea conditions [10].
In the United States, Webb Research Corporation pioneered the feasibility of thermal gradient propulsion with the Slocum Thermal glider (Figure 4a). Although the early thermal cycle efficiency was relatively low (approximately 3%), it demonstrated the potential to extract propulsive energy from the environment, achieving theoretically unprecedented endurance [43]. Meanwhile, in France, collaborative efforts between enterprises like ACSA and institutes such as CNRS have made significant progress in low-power design and energy management. Their SeaExplorer platform (Figure 4b), utilizing an innovative wingless design and rechargeable battery technology, set world records for multisensor UUVs by achieving 60 days of continuous endurance covering 1183 km [44,45]. Concurrently, researchers at Tianjin University, China, have focused on optimizing the volumetric change rate and mechanical output of localized thermal engines. For example, a thermally driven glider prototype equipped with an optimized phase-change engine achieved an average power output of 124 W and completed a 677-km continuous voyage during sea trials [38]. Comparatively, the US models pioneered the conceptual viability of thermal propulsion [43], the French platforms excel in holistic energy efficiency and endurance records [44,45], while the Chinese platforms offer distinct engineering solutions to maximize thermal engine mechanical output [38]. Because thermal engines operate entirely underwater and rely on stable vertical temperature gradients, they are inherently suited for long-term, deep-sea basin-scale profiling missions, overcoming the weather-dependence of solar platforms.

To further enhance adaptability, approaches have been explored to optimize gliding trajectories and displacement for regions with shallow thermoclines or minimal temperature gradients [46]. Attempts have also been made to use heat pipes to recover waste heat from thermal engines to improve battery performance in low-temperature environments [47]. Nevertheless, this technology still faces challenges such as low energy conversion efficiency and power density, as well as insufficient motion stability in areas with significant thermocline variations [48].
Ocean thermal energy conversion (OTEC) serves as a significant renewable energy source, offering a highly promising solution for enabling long-term, autonomous observation by unmanned underwater platforms such as gliders. Among the various OTEC technologies, phase change material-based conversion systems are the most mature, having been validated through multiple sea trials. Future efforts should focus on enhancing energy conversion efficiency and system power density, improving adaptability and reliability in complex marine environments, and achieving true energy autonomy and sustained operations for underwater mobile observation platforms through multi-source integration with solar and wave energy, coupled with intelligent energy management.Table 2 summarizes the developmental milestones of thermal-powered underwater gliders.
Table 2. Developmental milestones of thermal-powered underwater gliders.
|
Year |
Glider Model |
Institution |
Key Features and Highlights |
|---|---|---|---|
|
2007 |
Slocum Thermal |
Webb Research Corp. (USA) |
The Slocum Thermal, the first operational thermal glider, is directly powered by ocean temperature gradients, achieving ~3% thermal efficiency and theoretically unlimited endurance [1]. |
|
2013 |
SeaExplorer |
ALSEAMAR (France) |
The wingless SeaExplorer achieved 60-day endurance, 1183 km range, and 1168 profiles with 18% battery remaining [44]. Its ADCP measures currents with ~2 cm/s RMS error vs. shipboard [45]. |
|
2018 |
Petrel II |
Tianjin University (China) |
The Petrel II optimized PCM mechanism for high-efficiency thermal conversion, achieving 27-day endurance, 677 km range, 113 profiles (max depth 960 m), with thermal engine delivering 124 W and 89.2% volumetric efficiency [37]. |
|
2021 |
TEG |
Zhejiang University Tianjin University (China) |
TEG prototype achieves 0.2235 J/kg·m energy consumption (24% lower than electric gliders). With 8.4 kg battery: 677 km range (Petrel-II: 13.1 kg for 915 km). PCM volumetric change rate: 11.77% [10]. |
2.3. Hybrid Environmental Energy System Utilization
As the application scenarios of underwater gliders expand and mission complexity increases, single-energy-source propulsion systems increasingly reveal limitations in stability, power density, and environmental adaptability. To overcome these constraints, hybrid energy propulsion technologies integrating two or more energy conversion and utilization mechanisms have emerged as a cutting-edge approach to enhance glider endurance, mission reliability, and environmental adaptability. The core of hybrid systems lies in combining sustained low-power-density energy sources with high-power or highly controllable energy sources to achieve complementary and synergistic optimization of energy supply. Its advantages are primarily reflected in three aspects. First, energy complementarity effectively mitigates the intermittency and variability of single energy sources. For instance, wave energy or stored thermal energy can provide supplementation during periods without sunlight. Second, performance enhancement: incorporating high-power units like propulsion modules significantly boosts the glider’s maneuverability, speed, and station-keeping capability in strong currents. Third, mission adaptability: dynamically adjusting energy allocation strategies based on mission phases—such as long-range cruising, detailed observation, or stationary monitoring—maximizes overall energy efficiency [15,49].
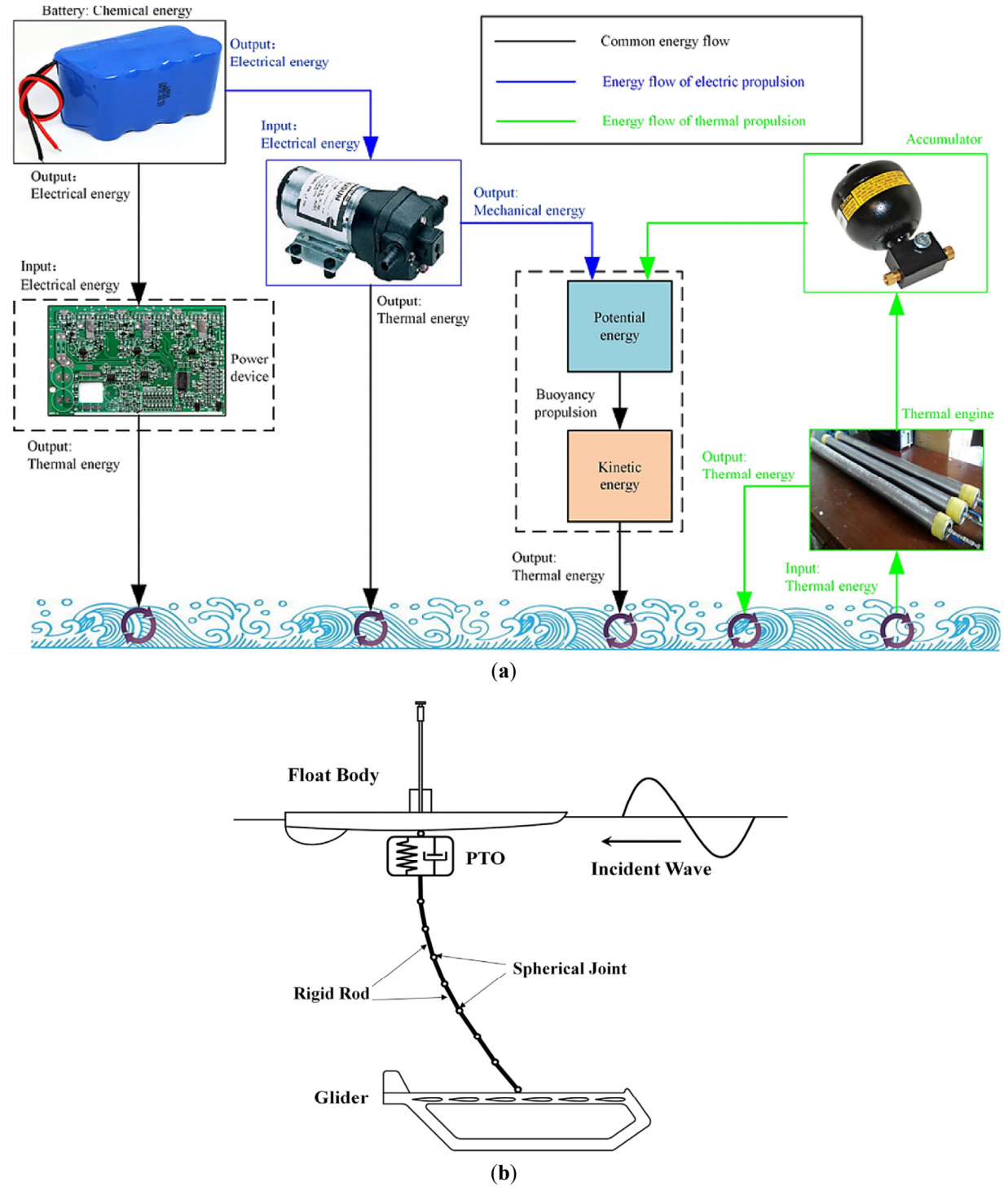
Current research on hybrid-powered underwater gliders primarily focuses on two technical pathways. The first is thermoelectric hybrid propulsion, integrating ocean thermal energy conversion engines with electrochemical batteries. Studies indicate that such systems combine the long endurance of purely thermally driven gliders with the controllability advantages of purely electrically driven gliders. By optimizing navigation parameters, their overall endurance can be significantly enhanced, and comparative sea trials have validated their superior energy efficiency [11]. To illustrate the specific mechanisms of multi-source synergy, Figure 5a details the energy flow within a thermal-electric hybrid glider (TEG) [10]. Unlike pure thermal gliders, the TEG features parallel energy conversion pathways. During the vertical profiling cycle, the thermal engine harvests heat from the ocean temperature gradient, causing the phase-change material (PCM) to expand. This expansion stores mechanical potential energy in a high-pressure hydraulic accumulator, which is subsequently released to drive the buoyancy engine and generate kinetic energy for gliding. Concurrently, the onboard battery supplies electrical energy to the control system, sensors, and an auxiliary electric pump. This dual-drive architecture ensures that when the environmental thermal gradient is insufficient, the electric pump can seamlessly compensate for the required buoyancy adjustments, thereby balancing ultra-long endurance with reliable maneuverability. The second approach combines buoyancy-driven propulsion with propellers to enhance the maneuverability and speed of traditional gliders. Related studies have established dynamic models for such (including works like “Dynamic modeling and analysis of underwater glider in the ocean environment” and “An Optimal Passive Buoyancy Compensation System for Deep-sea Gliders Based on GA”) systems and validated the effectiveness of advanced controllers [15]. Practically, hybrid-driven gliders integrated with waterjet propulsion modules have been developed and tested at sea, achieving speeds up to 2.31 m/s and significantly improving operational capabilities in complex sea conditions [49].
Similarly, hybrid systems harvesting surface wave energy have been developed to significantly enhance energy autonomy. The foundation of this technology traces back to the original Wave Glider pioneered by Liquid Robotics [50]. Building on this paradigm, Figure 5b depicts the physical model of a specific Wave Energy Converter-Glider (WEC-Glider) [51]. This system consists of a surface float connected to an underwater glider body via an umbilical cable. As incident ocean waves induce heave and pitch motions in the surface float, this mechanical energy is transmitted downward. The hydrofoils on the underwater glider passively convert this vertical oscillation into forward kinetic thrust. Simultaneously, a Power Take-Off (PTO) mechanism—typically integrating a mechanical transmission, such as a ball screw, with a permanent magnet synchronous generator—captures the relative reciprocating motion between the float and the glider, converting it into electrical energy. This dual-pathway conversion allows the WEC-Glider to achieve simultaneous forward propulsion and continuous battery charging in dynamic sea states. This multi-source complementarity allows hybrid systems to support power-hungry sensors and provide emergency burst thrust. Consequently, they are uniquely capable of executing complex, high-energy missions such as typhoon current monitoring, where overcoming strong ocean currents is mandatory [10,51].
Despite promising prospects, hybrid energy propulsion technology faces multiple challenges. High system integration complexity arises from the potential increase in glider structural weight, hydrodynamic drag, and reliability risks due to the superposition of multiple energy harvesting and conversion devices. This necessitates comprehensive trade-offs through innovative configuration design and hydrodynamic optimization [52]. Intelligent energy management demands urgent attention, requiring adaptive algorithms that dynamically assess energy status, mission requirements, and environmental conditions. Data-model fusion frameworks for energy consumption prediction and optimization offer promising approaches [7]. Furthermore, ensuring long-term reliability and cost-effectiveness of hybrid systems in harsh marine environments remains to be fully validated, necessitating technological iteration and standardization to reduce manufacturing costs.
Future research in this field will advance toward deep integration and intelligent collaboration. Key breakthroughs for constructing ultra-long-endurance, adaptive marine autonomous observation networks will include: deeply integrating energy prediction with mission planning through AI algorithms; developing pluggable, reconfigurable modular energy pods; and exploring dynamic energy coordination and replenishment mechanisms among multi-glider clusters [53,54]. Simultaneously, intelligent hybridization and coordinated management of multiple energy sources—such as solar, wave, and wind energy systems—have proven effective in addressing the intermittency of single energy sources and enhancing overall system adaptability under variable sea conditions [55,56]. This represents a significant trend toward improving the environmental universality of underwater gliders.Based on the operational characteristics and engineering constraints discussed in the preceding sections, the optimal application scenarios for various environmental energy propulsion systems are systematically compared in Table 3. This summary highlights how the inherent thermodynamic advantages and limitations of each power source directly dictate their suitability for specific missions, ranging from shallow-water ecological monitoring to extreme typhoon current observation.
Table 3. Quantitative Comparison and Application Scenarios of Renewable Energy Sources.
|
Energy Source |
Quantitative Parameters |
Advantages and Limitations |
Applications and Justification |
|---|---|---|---|
|
Solar Energy |
Efficiency: 15–22% (surface); rapidly decays underwater. Power Density: 150–200 W/m2. System Weight: Light (1–3 kg for thin-film panels). Bulkiness: Requires large surface area (0.5–1.0 m2), limiting optimal hydrodynamic shape. |
Advantages: High mature conversion efficiency at surface; scalable by increasing panel area; highly renewable. Limitations: Relies strictly on sunlight; prolonged surface time interrupts continuous diving and increases biofouling risks. |
Shallow-water ecological monitoring: Gliders can frequently surface to recharge while continuously monitoring upper water column algal blooms or coral reefs. |
|
Thermal Energy |
Efficiency: Carnot 6.7%; Actual system total 0.3–5.4%. Energy Density: Latent heat ~200 kJ/kg; electrical output ~1.1 kJ/kg. System Weight: Heavy (15–25 kg for PCM tubes, accumulators, and bladders). Bulkiness: External tubes significantly increase vehicle diameter and hydrodynamic drag. |
Advantages: Operates entirely underwater (stealthy). theoretically unlimited endurance; immune to surface weather conditions. Limitations: Extremely low thermodynamic efficiency; strict dependence on strong vertical temperature gradients (thermoclines); slow energy extraction rate. |
Deep-sea basin-scale profiling: Ideal for months-long, slow-paced hydrographic data collection across deep oceans where strong thermoclines naturally exist. |
|
Hybrid Systems |
Efficiency: Offsets low thermal efficiency with high electric efficiency (80–90%). Energy Density: Blends PCM (1.1 kJ/kg) with Li-ion batteries (150–250 Wh/kg). System Weight: Heaviest configuration; adds multi-source modules. Bulkiness: Increases overall vehicle length and volume, requiring sophisticated internal packaging. |
Advantages: Multi-source complementarity balances extreme endurance with high maneuverability; capable of supporting power-hungry sensor payloads. Limitations: High mechanical complexity and integration cost; increased vehicle weight; demands sophisticated intelligent energy management controllers. |
Typhoon current monitoring and complex missions: The electric auxiliary drive provides emergency burst thrust to overcome strong ocean currents, ensuring survivability in extreme dynamic sea states. |
3. Application Scenarios and Typical Applications
3.1. Typical Application Scenarios for Underwater Gliders
The integration of environmental energy systems has transformed underwater gliders from periodic data collection tools into intelligent, persistent observation platforms capable of undertaking long-term, complex missions. Their typical application scenarios encompass four primary directions. First, in long-term continuous scientific observation, sensor-equipped gliders can conduct cross-seasonal and annual continuous profiling to reveal seasonal variations in biogeochemical processes such as carbon cycling in key marine areas [57], or utilise their ultra-long endurance to study oceanic thermohaline structures and water mass movements [39,40]. Second, in monitoring extreme and dynamic environments, ‘virtual moored’ observation networks formed by glider arrays have successfully captured detailed dynamic processes in the upper ocean during typhoon passages [58], while hybrid propulsion systems significantly enhance their manoeuvrability and operational capability in strong current zones [49]. Thirdly, within acoustic monitoring and security applications, their low-noise characteristics render them exceptional mobile acoustic platforms. Their efficacy in monitoring marine mammal acoustic signals has been validated [27], while noise-reduction designs have enhanced the precision of acoustic detection and stealth [59]. Fourthly, within adaptive collaborative observation networks, multi-vehicle path planning methods based on holistic optimisation achieve efficient coverage of target areas [60]. Furthermore, control strategies proposed for hybrid formations comprising wave gliders and underwater gliders lay the technical foundation for constructing intelligent, distributed three-dimensional observation networks. Collectively, these application scenarios propel underwater gliders to play an irreplaceable core role in marine scientific research, environmental conservation, and security assurance.
3.2. Future Research Directions
Future research will focus on four core directions to achieve truly sustainable and intelligent operation of environmental energy underwater gliders: Firstly, deep integration and intelligent management of multiple energy sources, requiring the development of highly efficient integrated hybrid energy systems (combining thermal gradient energy [39,40], solar energy [20], wave energy [61], etc.), alongside the creation of intelligent energy management algorithms based on data and model fusion for energy consumption prediction [7]. This will enable dynamic optimisation of resource allocation and facilitate low-power emergency operation [2]. Secondly, enhancing decision-making with Machine Learning (ML), particularly through approaches such as meta-reinforcement learning, represents a pragmatic future trend. Because environmentally powered gliders are inherently under-actuated and lack continuous propeller-based thrust, their maneuverability is restricted. Consequently, ML applications on these platforms should not overreach into complex spatial maneuvers, such as dynamic formation control or high-frequency adaptive path planning. Instead, the focus must firmly remain on energy-aware decision-making and sensory pattern recognition. For instance, onboard ML models can be utilized to analyze real-time sensory data (identifying specific oceanographic features) to autonomously adjust buoyancy schedules, thereby optimizing the sampling resolution within target water layers [54]. Furthermore, predictive ML algorithms can be leveraged to forecast environmental energy availability and fluid dynamics, helping the glider optimize its energy-harvesting cycles and manage its stringent power budget more efficiently [60]. Fourthly, novel materials, mechanisms and cross-domain integration focus on developing high-performance energy conversion materials [20,41,62] and biomimetic structures [63]. Through multidisciplinary optimisation, this ultimately propels gliders towards a new generation of ocean observation paradigms characterized by energy autonomy, high intelligence, and swarm collaboration. Fifthly, strengthening cross-disciplinary system optimization and standardized validation by integrating methodologies from marine engineering, materials science, control systems, and artificial intelligence. This establishes a complete technological chain from modelling and simulation to in-situ sea trials, accelerating the evolution towards reliable, practical next-generation ocean observation platforms. Furthermore, while directly utilizing tidal or ocean current energy for glider propulsion remains purely speculative today due to severe miniaturization constraints, future breakthroughs in micro-scale turbine technologies could potentially open new avenues for auxiliary power generation in strong-current environments.
4. Conclusions
Traditional electrically powered underwater gliders face limitations in meeting the demands of long-term, continuous ocean observation missions due to constraints on onboard battery energy density. Consequently, harnessing abundant, sustainable in-situ renewable energy sources within the marine environment—such as thermal gradient energy, solar energy, and tidal energy—for propulsion or power augmentation has emerged as a critical direction for overcoming endurance limitations and enabling persistent intelligent operations. This paper provides a systematic review of research progress, technical challenges, and application prospects for environmentally powered underwater gliders.
Currently, significant advances have been made in individual environmental energy propulsion technologies. Solar-powered gliders utilise photovoltaic cells and flexible designs to provide continuous power replenishment for electronic systems, though energy harvesting remains constrained by sunlight availability and seawater transparency. Thermohaline-driven gliders, based on phase-change material thermo-engines, directly convert vertical oceanic temperature gradients into buoyancy-regulating propulsion. These have demonstrated ultra-long endurance capabilities exceeding hundreds of kilometres, yet their efficiency and stability heavily depend on pronounced thermocline structures. Tidal energy, owing to its highly regular and predictable nature, presents a potential option for in-situ energy replenishment in specific strong-current marine areas. Nevertheless, any single energy source exhibits temporal and spatial intermittency or regional dependency, making it challenging to ensure stable, reliable long-term operation across the world’s variable marine environments.
Consequently, developing multi-energy complementary hybrid propulsion systems represents an inevitable trend for enhancing the environmental adaptability, mission reliability, and overall energy efficiency of underwater gliders. By integrating multiple energy sources such as thermoelectric, solar, and wave power, and coordinating these with energy storage units and intelligent management algorithms, the volatility inherent in single energy sources can be effectively mitigated, balancing the requirements for extended endurance and high manoeuvrability. System architectures such as thermoelectric hybrids and buoyancy-propulsion hybrids have been validated through sea trials, demonstrating superior energy efficiency and operational capabilities.
Statement of the Use of Generative AI and AI-Assisted Technologies in the Writing Process
During the preparation of this manuscript, the author used Gemini in order to assist with language refinement and content organization. After using this tool, the author reviewed and edited the content as needed and take full responsibility for the content of the published article.
Author Contributions
Conceptualization, S.Z. and R.P.; Methodology, S.Z.; Investigation, S.Z., R.Z. and S.N.; Resources, R.Z.; Data Curation, S.Z.; Writing—Original Draft Preparation, S.Z.; Writing—Review & Editing, S.Z., R.P. and S.N.; Visualization, S.Z.; Supervision, R.P.; Project Administration, R.Z.; Funding Acquisition, R.P.
Ethics Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The datasets generated during and/or analyzed during the current study are available from the corresponding author on request.
Funding
This work is supported by the China Postdoctoral Science Foundation (2025M770292); the Opening Project of Key Laboratory of Marine Smart Equipment, Fujian Province University (KF-92-25102); the Innovation and Entrepreneurship Training Program for Undergraduates of Tianjin University of Technology (202510060002, 202510060025); the Tianjin Municipal Enterprise Technology Commissioner Project (24YDTPJC00860); the Tianjin Municipal Natural Science Foundation Diversified Investment Project (24JCQNJC00290).
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Javaid MY, Ovinis M, Nagarajan T, Hashim FBM, Karuppanan S, Abdul Karim ZA, et al. Underwater Gliders: A Review. MATEC Web Conf. 2014, 13, 02020. DOI:10.1051/matecconf/20141302020 [Google Scholar]
- Yu P, Zhou Y, Sun X, Sang H, Zhang S. Station-keeping strategy in emergency mode for wave gliders considering power shortages. Appl. Ocean Res. 2024, 153, 104236. DOI:10.1016/j.apor.2024.104236 [Google Scholar]
- Xi H, Ma W, Song Y, Fa S, Song J, Yang M. Energy consumption prediction and endurance optimization for underwater gliders based on data-model fusion. Eng. Appl. Artif. Intell. 2025, 162, 112664. DOI:10.1016/j.engappai.2025.112664 [Google Scholar]
- Wu S, Lyu G, Wu P, Sun C, Ma W, Niu W. Multi-objective optimization for yaw control parameters of underwater glider based on roll center compensation. Ocean Eng. 2025, 341, 122630. DOI:10.1016/j.oceaneng.2025.122630 [Google Scholar]
- Song Y, Niu W, Shi W, Wu H, Xu Y. Optimal feedback control parameters for underwater gliders: Balancing energy efficiency and motion accuracy. Ocean Eng. 2025, 322, 120544. DOI:10.1016/j.oceaneng.2025.120544 [Google Scholar]
- Yang H, Mahmoudian N. Finite-time prescribed performance with fixed-time disturbance rejection for underwater glider heading control. Ocean Eng. 2025, 337, 121842. DOI:10.1016/j.oceaneng.2025.121842 [Google Scholar]
- Wang T, Juan R, Luo M, Chen J, Li Y, Zhou Y, et al. Event-triggered model predictive control for trajectory tracking of underwater gliders in currents. Ocean Eng. 2026, 343, 123341. DOI:10.1016/j.oceaneng.2025.123341 [Google Scholar]
- Luo M, Wang T, Juan R, Liu S, Wan J, Gao Z. Fixed-time backstepping control of attitude tracking in 3D space for an autonomous underwater glider. Ocean Eng. 2025, 340, 122304. DOI:10.1016/j.oceaneng.2025.122304 [Google Scholar]
- Zhang X, Cao Y, Zhou H, Yao B, Lian L, Mao Z. Fixed-time trajectory tracking control for underwater glider: Theory and experiment. Ocean Eng. 2025, 342, 123020. DOI:10.1016/j.oceaneng.2025.123020 [Google Scholar]
- Li B, Yang Y, Zhang L, Wang S. Research on sailing range of thermal-electric hybrid propulsion underwater glider and comparative sea trial based on energy consumption. Appl. Ocean Res. 2021, 114, 102807. DOI:10.1016/j.apor.2021.102807 [Google Scholar]
- Wang X, Shang J, Luo Z, Tang L, Zhang X, Li J. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energy Rev. 2012, 16, 1958–1970. DOI:10.1016/j.rser.2011.12.016 [Google Scholar]
- Melikoglu M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. DOI:10.1016/j.oceaneng.2017.11.045 [Google Scholar]
- Wilberforce T, El Hassan Z, Durrant A, Thompson J, Soudan B, Olabi AG. Overview of ocean power technology. Energy 2019, 175, 165–181. DOI:10.1016/j.energy.2019.03.068 [Google Scholar]
- Ageev MD, Blidberg DR, Jalbert J, Melchin CJ, Troop DP. Results of the evaluation and testing of the solar powered AUV and its subsystems. In Proceedings of the 2002 Workshop on Autonomous Underwater Vehicles, San Antonio, TX, USA, 21 June 2002. [Google Scholar]
- Isa K, Arshad MR, Ishak S. A hybrid-driven underwater glider model, hydrodynamics estimation, and an analysis of the motion control. Ocean Eng. 2014, 81, 111–129. DOI:10.1016/j.oceaneng.2014.02.002 [Google Scholar]
- Chao Y. Autonomous underwater vehicles and sensors powered by ocean thermal energy. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016. [Google Scholar]
- Blidberg R, Jalbert J, Ageev MD. The AUSI/IMTP solar powered autonomous undersea vehicle. In Proceedings of the IEEE Oceanic Engineering Society. OCEANS’98. Conference Proceedings (Cat. No.98CH36259), Nice, France, 28 September–1 October 1998. [Google Scholar]
- Crimmins DM, Patty CT, Beliard MA, Baker J, Jalbert JC, Komerska RJ, et al. Long-Endurance Test Results of the Solar-Powered AUV System. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar]
- Li Z, Yang Y, Hu Q, Zhu H. Development and depth control of a new solar AUV. In Proceedings of the 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), Koh Samui, Thailand, 4–9 December 2023. [Google Scholar]
- Bai H, Lu T, Liu W, Li X, Lv W, Lv S. Maximizing underwater energy harvesting efficiency using flexible solar cells: A pathway to sustainable ocean power. Proc. Natl. Acad. Sci. USA 2025, 122, e1871316174. DOI:10.1073/pnas.2423651122 [Google Scholar]
- Röhr JA, Lipton J, Kong J, Maclean SA, Taylor AD. Efficiency Limits of Underwater Solar Cells. Joule 2020, 4, 840–849. DOI:10.1016/j.joule.2020.02.005 [Google Scholar]
- Hasan A, Dincer I. A new performance assessment methodology of bifacial photovoltaic solar panels for offshore applications. Energy Convers. Manag. 2020, 220, 112972. DOI:10.1016/j.enconman.2020.112972 [Google Scholar]
- Fu K, Wang P, Sun B, Zhao L, Liu C. Design, Development and Testing of a New Solar-powered Bionic Underwater Glider with Multi-locomotion Modes. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Tonai H, Arima M. Design of an Ocean-Going Solar-Powered Underwater Glider. In Proceedings of the Twenty-Third International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June 2013. [Google Scholar]
- Blidberg D, Mupparapu S, Chappell S, Komerska R, Jalbert JC, Nitzelm R. The SAUV II (solar powered AUV) test results 2004. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005. [Google Scholar]
- Woods TN, Rottman GJ, Harder JW, Lawrence GM, McClintock WE, Kopp GA, et al. Overview of the EOS SORCE mission. In Proceedings of the SPIE, San Diego, CA, USA, 15 November 2000. [Google Scholar]
- Arima M, Yoshida K, Tonai H. Development of a coral monitoring system for the use of underwater vehicle. In Proceedings of the OCEANS 2014—TAIPEI, Taipei, China, 7–10 April 2014. [Google Scholar]
- Arima M, Yamada T. Development of a solar-powered underwater glider. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010. [Google Scholar]
- Arima M, Takeuchi A. Development of an autonomous surface station for underwater passive acoustic observation of marine mammals. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016. [Google Scholar]
- Xiao C, Gulfam R. Opinion on ocean thermal energy conversion (OTEC). Front. Energy Res. 2023, 11, 1115695. DOI:10.3389/fenrg.2023.1115695 [Google Scholar]
- Liu W, Xu X, Chen F, Liu Y, Li S, Liu L, et al. A review of research on the closed thermodynamic cycles of ocean thermal energy conversion. Renew. Sustain. Energy Rev. 2020, 119, 109581. DOI:10.1016/j.rser.2019.109581 [Google Scholar]
- Zereshkian S, Mansoury D. A study on the feasibility of using solar radiation energy and ocean thermal energy conversion to supply electricity for offshore oil and gas fields in the Caspian Sea. Renew. Energy 2021, 163, 66–77. DOI:10.1016/j.renene.2020.08.111 [Google Scholar]
- Abbas SM, Alhassany HDS, Vera D, Jurado F. Review of enhancement for ocean thermal energy conversion system. J. Ocean Eng. Sci. 2023, 8, 533–545. DOI:10.1016/j.joes.2022.03.008 [Google Scholar]
- Nakib TH, Hasanuzzaman M, Rahim NA, Habib MA, Adzman NN, Amin N. Global challenges of ocean thermal energy conversion and its prospects: A review. J. Ocean Eng. Mar. Energy 2025, 11, 197–231. DOI:10.1007/s40722-024-00368-4 [Google Scholar]
- Zhang H, Liu C, Yang Y, Wang S. Ocean thermal energy utilization process in underwater vehicles: Modelling, temperature boundary analysis, and sea trail. Int. J. Energy Res. 2020, 44, 2966–2983. DOI:10.1002/er.5123 [Google Scholar]
- Aresti L, Christodoulides P, Michailides C, Onoufriou T. Reviewing the energy, environment, and economy prospects of Ocean Thermal Energy Conversion (OTEC) systems. Sustain. Energy Technol. Assess. 2023, 60, 103459. DOI:10.1016/j.seta.2023.103459 [Google Scholar]
- Yang Y, Wang Y, Ma Z, Wang S. A thermal engine for underwater glider driven by ocean thermal energy. Appl. Therm. Eng. 2016, 99, 455–464. DOI:10.1016/j.applthermaleng.2016.01.038 [Google Scholar]
- Wang G, Yang Y, Wang S, Zhang H, Wang Y. Efficiency analysis and experimental validation of the ocean thermal energy conversion with phase change material for underwater vehicle. Appl. Energy 2019, 248, 475–488. DOI:10.1016/j.apenergy.2019.04.146 [Google Scholar]
- Wang G, Yang Y, Wang S. Ocean thermal energy application technologies for unmanned underwater vehicles: A comprehensive review. Appl. Energy 2020, 278, 115752. DOI:10.1016/j.apenergy.2020.115752 [Google Scholar]
- Ma Z, Wang Y, Wang S, Yang Y. Ocean thermal energy harvesting with phase change material for underwater glider. Appl. Energy 2016, 178, 557–566. DOI:10.1016/j.apenergy.2016.06.078 [Google Scholar]
- Liu T, Sha H, Li M, Sun M, Chen G, Wang J, et al. A composite phase change material with large volume change rate for thermal underwater glider. Appl. Therm. Eng. 2023, 235, 121388. DOI:10.1016/j.applthermaleng.2023.121388 [Google Scholar]
- Zhang Z, Tian W, Hu Y, Li B. Numerical study on phase change propulsion mechanism of thermal underwater glider based on spectral method. Appl. Therm. Eng. 2024, 256, 124066. DOI:10.1016/j.applthermaleng.2024.124066 [Google Scholar]
- Jones C, Webb D, Kohut J, Glenn S, Kerfoot J, Schofield O, et al. Slocum Gliders—Advancing Oceanography. In Proceedings of the 15th International Symposium on Unmanned Untethered Submersible Technology conference (UUST’07), Durham, NH, USA, 19–22 August 2007. [Google Scholar]
- Claustre H, Beguery L, Patrice P. SeaExplorer Glider Breaks Two World Records Multisensor UUV Achieves Global Milestones for Endurance, Distance. Sea Technol. 2014, 55, 19–22. Available online: https://www.igp.de/images/broschueren/SeaTechnology%20-%202014-03.pdf (accessed on 22 December 2025).
- de Fommervault O, Besson F, Beguery L, Le Page Y, Lattes P. SeaExplorer Underwater Glider: A New Tool to Measure depth-resolved water currents profiles. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Yang H, Ma J. Optimization of displacement and gliding path and improvement of performance for an underwater thermal glider. J. Hydrodyn. 2010, 22, 618–625. DOI:10.1016/S1001-6058(09)60095-0 [Google Scholar]
- Ren M, Li S, Sun C, Yang M, Wang P, Wang C, et al. Thermal characteristics analysis and waste heat utilization of the buoyancy engine in hadal class unmanned underwater vehicles. Appl. Therm. Eng. 2025, 274, 126581. DOI:10.1016/j.applthermaleng.2025.126581 [Google Scholar]
- Liang Y, Zhang L, Wang Y, Yang Y, Yang S, Niu W. Dynamic-thermal modeling and motion analysis for deep-sea glider with passive buoyancy compensation liquid. Ocean Eng. 2021, 238, 109704. DOI:10.1016/j.oceaneng.2021.109704 [Google Scholar]
- Zhang J, Yuan C, Wu X, Zeng D, Li B, Yang G. Development and experiments of a water-jet propulsion module for hybrid underwater gliders. Ocean Eng. 2025, 333, 121413. DOI:10.1016/j.oceaneng.2025.121413 [Google Scholar]
- Hine R, Willcox S, Hine G, Richardson T. The wave glider: A wave-powered autonomous marine vehicle. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–6. [Google Scholar]
- Zhang Y, Zhou Y, Chen W, Zhang W, Gao F. Design, modeling and numerical analysis of a WEC-Glider (WEG). Renew. Energy 2022, 188, 911–921. DOI:10.1016/j.renene.2022.02.102 [Google Scholar]
- Hao Y, Tan L, Feng K, Wu H, Tan Z, Yan S. Hydrodynamic shape optimization for catapult-launched underwater glider considering multiple working conditions. Ocean Eng. 2025, 333, 121560. DOI:10.1016/j.oceaneng.2025.121560 [Google Scholar]
- Tian X, Zhou H, Zhang H, Zhang L, Shi L. LSTM & attention-based meta-reinforcement learning for trajectory tracking of underwater gliders with varying buoyancy loss and current disturbance. Ocean Eng. 2025, 326, 120906. DOI:10.1016/j.oceaneng.2025.120906 [Google Scholar]
- Li X, Xu X, Yan L, Zhao H, Zhang T. Energy-Efficient Data Collection Using Autonomous Underwater Glider: A Reinforcement Learning Formulation. Sensors 2020, 20, 3758. DOI:10.3390/s20133758 [Google Scholar]
- Khurshid H, Mohammed BS, Al-Yacouby AM, Liew MS, Zawawi NAWA. Analysis of hybrid offshore renewable energy sources for power generation: A literature review of hybrid solar, wind, and waves energy systems. Dev. Built Environ. 2024, 19, 100497. DOI:10.1016/j.dibe.2024.100497 [Google Scholar]
- Huang J, Iglesias G. Hybrid offshore wind–solar energy farms: A novel approach through retrofitting. Energy Convers. Manag. 2024, 319, 118903. DOI:10.1016/j.enconman.2024.118903 [Google Scholar]
- Curry RG, Lomas MW, Sullivan MR, Grundle D. Annual net community production and carbon exports in the central Sargasso Sea from autonomous underwater glider observations. Prog. Oceanogr. 2026, 240, 103619. DOI:10.1016/j.pocean.2025.103619 [Google Scholar]
- Fan S, Yuan P, Feng J, Huang H, Hu S, Zhao Z, et al. Observing typhoon-driven upper ocean dynamics in the South China Sea using a virtual mooring underwater glider array: Methods and analysis. J. Ocean. Eng. Sci. 2026, 11, 33–57. DOI:10.1016/j.joes.2025.09.003 [Google Scholar]
- Zhang M, Wang P, Chen J, Wang X, Sun T, Song Y, et al. Vibration and noise reduction of underwater gliders with a novel wing integrating flexible cladding and phononic crystals. Ocean Eng. 2025, 338, 121931. DOI:10.1016/j.oceaneng.2025.121931 [Google Scholar]
- Jing A, Gao J, Liu C, Li L, Yang C. An Energy-Optimized Path Spatiotemporal Planning for Underwater Gliders. IEEE Trans. Control Syst. Technol. 2025, 33, 2121–2135. DOI:10.1109/TCST.2025.3573585 [Google Scholar]
- Zhang Y, Wen Y, Han X, Zhang W, Gao F, Chen W. Gyroscopic wave energy converter with a self-accelerating rotor in WEC-glider. Ocean Eng. 2023, 273, 113819. DOI:10.1016/j.oceaneng.2023.113819 [Google Scholar]
- Wang Z, Hou L, Yang D, Zhang M, Liu S, Yu Z, et al. A self-powered underwater glider using bidirectional swing-rotation hybrid nanogenerator. Nano Energy 2024, 125, 109526. DOI:10.1016/j.nanoen.2024.109526 [Google Scholar]
- Du ZP. Design and Research of a New Biomimetic Wave-Powered Glider. Ph.D. Thesis, Qingdao University of Science and Technology, Qingdao, China, 2017. [Google Scholar]