A Review on the Role of Fuzzy Logic in Simulation, Planning and Control of Drones

A Review on the Role of Fuzzy Logic in Simulation, Planning and Control of Drones

Received: 30 January 2026 Revised: 20 March 2026 Accepted: 29 April 2026 Published: 14 May 2026

© 2026 The authors. This is an open access article under the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).
1. Introduction
Fuzzy logic, since its inception [1], has been successfully applied in a plethora of areas [2,3]. The main idea of fuzzy logic (FL) is to model linguistic uncertainty in human decision-making, and the original FL proposed by Zadeh is now called type-1, as it was the initial version of this idea. More recently, type-2 has been proposed and developed to offer a better model of uncertainty [4], and consequently, more complex problems were solved [5,6]. Still, more complex problems can be tackled with the most recent version of fuzzy theory, called type-3 fuzzy logic [7,8,9], which offers an even better model of uncertainty, and now some recent successful applications have been achieved with this approach, like the interesting recent works presented in [10,11,12,13,14,15,16,17].
The development of autonomous flight systems has grown very rapidly because of the increasing amount of applications of the unmanned aerial vehicle (UAV) in military fields, in civil fields, and many others areas that are emerging [18]. In modern times, there is a wide variety of aircrafts used for UAVs, like fixed-wing airplanes, airships, and helicopters, among others [19]. Despite the advantages of quadcopters, like aircrafts, they are very unstable systems, and so any imbalance in their motion generates angular and linear accelerations, which can produce a collision if not compensated in a quickly fashion. Moreover, the quadcopter system is nonlinear, and the movements interact with each other, which further increases complexity. Proportional Integral Derivative (PID) controllers offer a simple, but at the same time an effective solution to stabilize the aircraft because they make it possible to treat every variable independently within a limited range in which the behavior of the quadcopter is approximately linear [20,21]. However, PID control has limitations in highly complex and uncertain situations, and here is when FL can offer a way to produce nonlinear fuzzy controllers that are able to handle these situations. On the other hand, drones have had many real applications, which makes it essential to have better control strategies that would render good solutions to related problems. In this sense, we can find that there are applications related to industry, as in [22,23]. Also, fuzzy logic can be used to design nonlinear controllers of drones, as in [24,25,26,27], where the authors of these works claim good results. Recently, the use of fuzzy logic in the area of UAVs has been increasing [28,29], and with the evolution of fuzzy logic (from type-1 to type-2 and type-3), there have been more papers utilizing higher types of fuzzy systems in control, simulation, and navigation of drones. As a basis for this statement, we have to state that this evolution has already happened in the area of controlling autonomous mobile robots, with good results [30,31], and we expect that this will also happen in the area of drones, as the navigation problem is similar to some extent. As a consequence, the main contribution of this paper is summarizing and analyzing the existing works in the state of the art of this area, as well as offering future trends of research in FL for drones and UAVs. Regarding competing methods, like neural networks or PID, the advantages of FL are that it provides a directly interpretable approach to build controllers based on expert knowledge and does not require training data, which neural networks need. Also, the FL approach is nonlinear, which can outperform traditional linear control methods, such as PID. Of course, the main limitation of FL is the lack of learning, which rovide, but we can provide.
The rest of the paper is organized as follows. Section 2 offers basic concepts of FL and drones, Section 3 outlines a review of the state of the art in this area, Section 4 puts forward future trends of research in this area, and Section 5 offers the conclusions.
2. Concepts of Fuzzy Logic and Drones
In this section, basic theoretical concepts regarding FL and drones are presented. The idea is to briefly provide some basic terminology about the two main concepts involved in this review, but if the readers need more details about these concepts, then they could check the references mentioned in the following paragraphs.
2.1. Basic Concepts of Fuzzy Logic
Since the emergence of the Fuzzy Sets, proposed by Zadeh [1], this kind of set has evolved for handling more information, starting from vagueness to a high level of uncertainty. This section offers the differences among the different types of Fuzzy Sets (FSs).
The definitions of Type-1, Type-2, and Type-3 Fuzzy Sets are formulated in a succinct way in Equation (1) and Equation (2), and Equation (3), respectively.
|
```latex\mathrm{A}^{(1)} = \{(x, \mu_\mathrm{A}(x)) \mid \forall x \in [0,1]\}``` |
(1) |
|
```latex\mathrm{A}^{(2)} = \{((x,u),\mu_{\tilde{A}}(x,u)) \mid \forall u \in J_x \subseteq [0,1]\}``` |
(2) |
|
```latex\mathrm{A}^{(3)} = \{((x,u),\mu_{\mathrm{A}^{(3)}}(x,u,z_1)) \mid x \in X, u \in U \subseteq [0,1], z_1 \in Z_1 \subseteq [0,1]\}``` |
(3) |
As we can note, in the original type-1 fuzzy sets, only one membership function (MF) is used, but in type-2, there is a primary MF and a secondary MF [4], while type-3 introduces a tertiary MF [7]. Historically, this process has occurred in this way due to the need of being able to cope with higher levels of uncertainty. These approaches are called Generalized FSs, and, as can be seen, with the evolution of the FSs, the definitions become more complex, handling vagueness, uncertainty, and second-order uncertainty, respectively. From these definitions, the concepts of fuzzy systems and inference can be outlined and applied to real problems.
2.2. Basic Definitions of Drones
The drone includes the three main orientation angles: pitch, roll, and yaw. The model consists of three nonlinear differential equations, but for simplicity, a linearized version (assuming linearization assumptions, such as small-angle approximation and decoupled axes) is given as:
|
```latex\ddot{\theta}=\frac{1}{I_\theta}\left(T_\theta-D_{\dot{\theta}}\dot{\theta}\right)``` |
(4) |
|
```latex\ddot{\phi}=\frac{1}{I_\phi}(T_\phi-D_{\dot{\phi}}\dot{\phi})``` |
(5) |
|
```latex\ddot{\Psi}=\frac{1}{I_\Psi}(T_\Psi-D_{\dot{\Psi}}\dot{\Psi})``` |
(6) |
where:
-
-
$$\ddot{\theta},\ddot{\phi},\ddot{\Psi}$$ represent the Pitch, Roll, and Yaw accelerations, respectively.
-
-
$${I}_{\theta}{,I}_{\phi }{,I}_{\mathrm{\Psi }}$$ are the inertia moments around the axis.
-
-
$${T}_{\theta}{,T}_{\phi },{T}_{\mathrm{\Psi }}$$ are the applied torques.
-
-
$$D_{\dot{\theta}},D_{\dot{\phi}},D_{\dot{\Psi}}$$ are the damping coefficients.
We can utilize this model to simulate drone behavior and test proposed controllers. Then, actual physical drones could be used to verify experimentally the controllers.
3. Fuzzy Logic and Drones
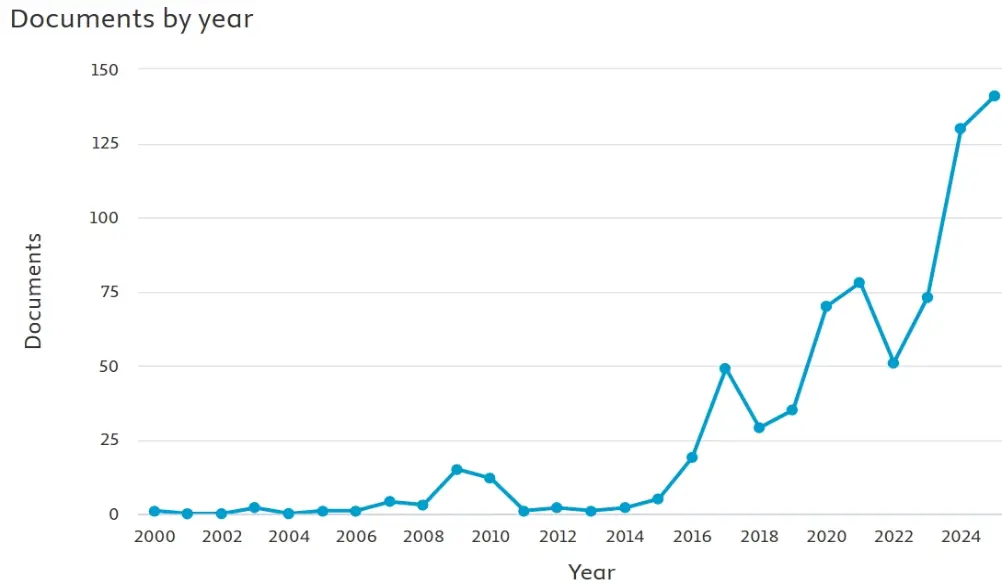
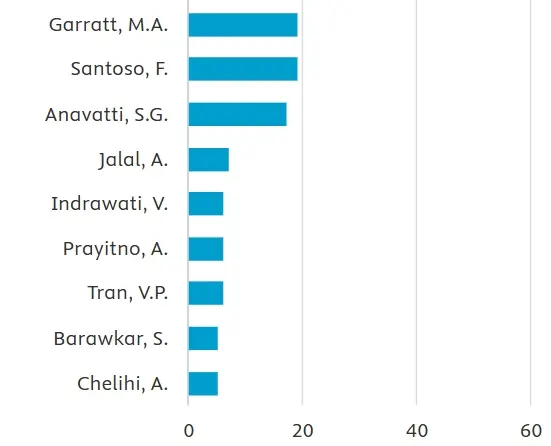
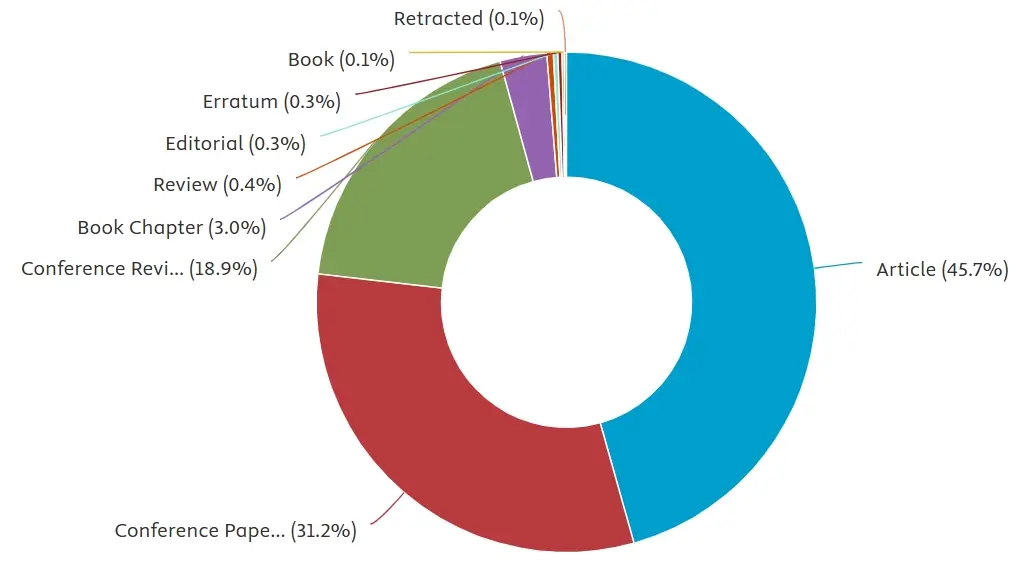
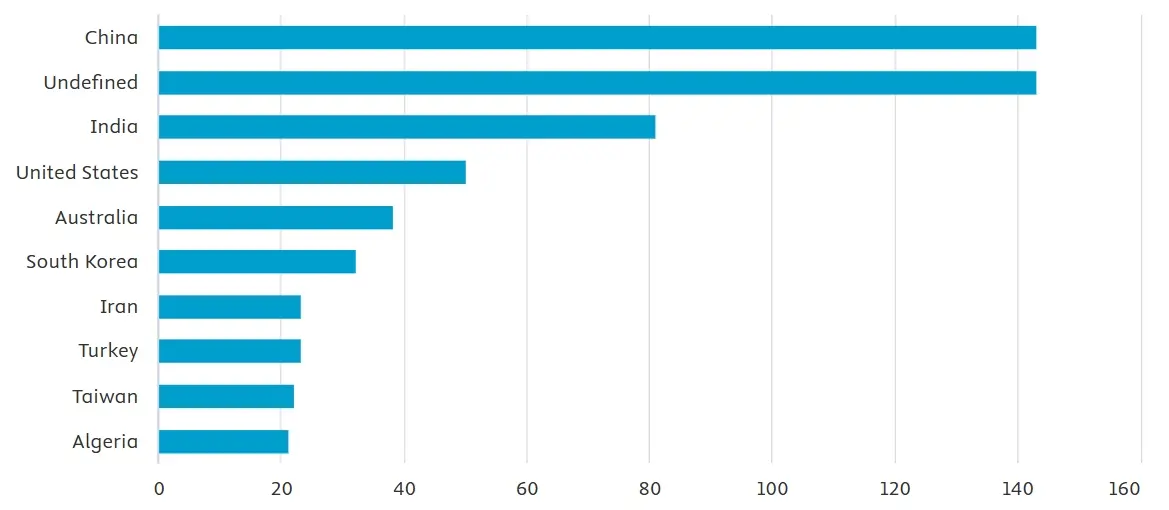
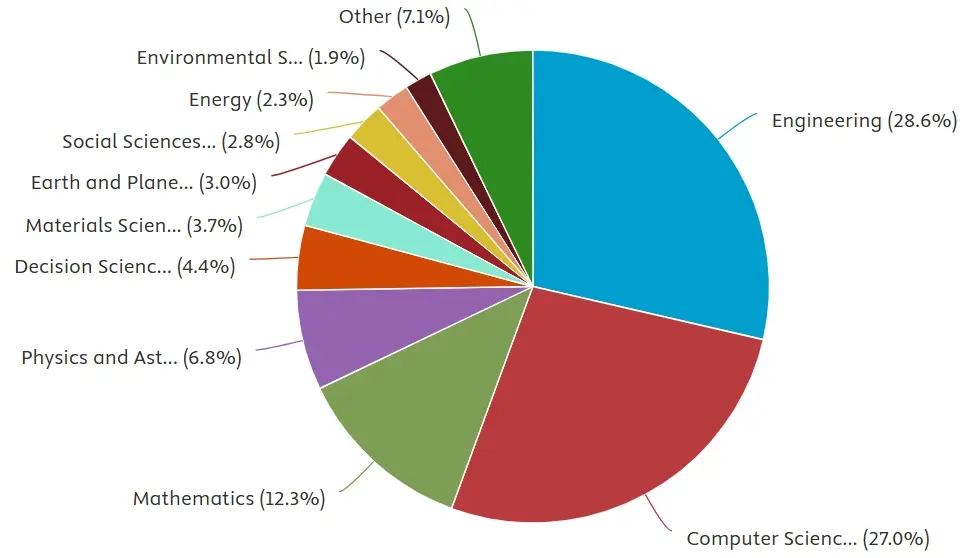
This section offers a summary of the search results in Scopus when we use the query with keywords “Fuzzy Drones”, which produces 725 documents (up to 31 December 2025). The list of documents was verified to ensure that all documents were truly related to fuzzy and drones. In Scopus, the query can be directly typed with the words, which in this case are: fuzzy drones. The reason for using this query is that using other formats, like for example: fuzzy control drones, produces a lower number of documents because is more restricted. We did try several variations, and we did find that this query produced the best set of results. We are considering all types of documents in the search, and the range is from the beginning of Scopus to 31 December 2025. The idea was to obtain all the documents in Scopus that contained the use of fuzzy logic for drone applications, which is the topic of the journal. The reason for using the Scopus database for our study is that Scopus basically contains all documents of Web of Science and the IEEE Xplore systems, as well as others, so in this form, the study is more complete using Scopus. The number of publications has been steadily increasing, with 141 publications in 2025 compared to 130 in 2024 and only 73 in 2023. Of this total, 45.7% are journal papers, 3% are chapters in edited books, 31.2% are papers in conference proceedings, and 0.1% are authored books. In Figure 1, we illustrate the number of publications in FL for drone applications, which clearly shows a steady increase. We believe that this increasing trend is due to several factors, but mainly due to technological advancements and emerging research gaps arising with the development of science. Figure 2 shows the top authors (according to the number of publications) in this area, where Garratt and Santono are the top authors in this list. Figure 3 illustrates the distribution of documents by type of publication, where journal articles are most frequent. Figure 4 summarizes the publications of the top countries in this area, which shows that China, India, and the USA are the top three countries in this research area. Figure 5 illustrates the distribution of documents with respect to the application area, showing that engineering is the main application area with 28.6% of the total number of documents.
As a brief discussion of the existing applications of drones and UAVs, when fuzzy logic is also involved, we can mention, for example, recent works on agricultural applications [29,32,33,34,35]. Also, we can mention the utilization of fuzzy logic in the control of drones and UAVs, like in [36,37,38,39,40,41,42]. In addition, there are some interesting works on the internet and network applications, as in [43,44,45,46,47,48]. On the other hand, examples of industrial applications, such as smart warehouses and logistics, can be found in [49,50,51,52,53,54,55,56]. Finally, other application areas, such as climate change crisis assessment, are described in the interesting works presented in [57,58,59,60,61,62,63].
Regarding the scientific impact of the research work in this area, we can analyze the increase in citations over the years as one relevant factor. Figure 6 illustrates how the number of citations has been steadily increasing over the years. In Table 1, we show the top six most cited papers in this area. The top cited paper is the one by Bai et al. [22] with 1157 citations, where an Industry 4.0 technologies assessment is presented. The second most cited paper is by Sah et al. [23] with 140 citations, where the barriers to implement drone logistics are analyzed. The third paper is by Zhang et al. [24], offers a fuzzy quantized control approach for quadrotors. We have to mention that although the first two papers are not directly related to control and navigation of drones, they contain the use of fuzzy logic in applications related to drones, and this is the reason why they were included in the analysis.
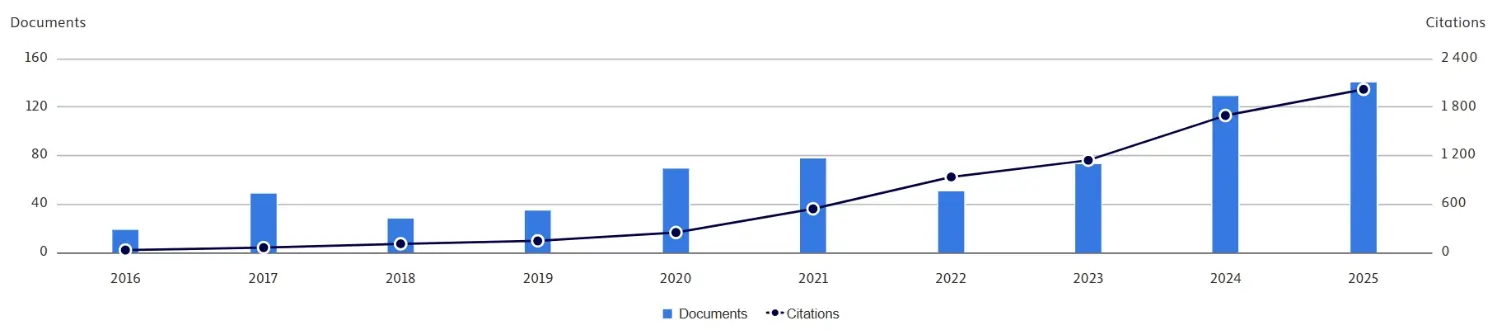
Table 1. Top six most cited papers in fuzzy logic for the drone application area.
|
Number |
Paper |
Authors |
Citations |
References |
|---|---|---|---|---|
|
1 |
Industry 4.0 technologies assessment: A sustainability perspective |
Bai C, et al. |
1157 |
[22] |
|
2 |
Analysis of barriers to implement drone logistics |
Sah B, et al. |
140 |
[23] |
|
3 |
Compound Adaptive Fuzzy Quantized Control for Quadrotor and Its Experimental Verification |
Zhang X, et al. |
110 |
[24] |
|
4 |
Robust path tracking of a quadrotor using adaptive fuzzy terminal sliding mode control |
Nekoukar V, et al. |
106 |
[25] |
|
5 |
Picture fuzzy WASPAS method for selecting last-mile delivery mode: A case study of Belgrade |
Simić V, et al. |
105 |
[26] |
|
6 |
A novel statistical method for scene classification based on multi-object categorization |
Ahmed A, et al. |
101 |
[27] |
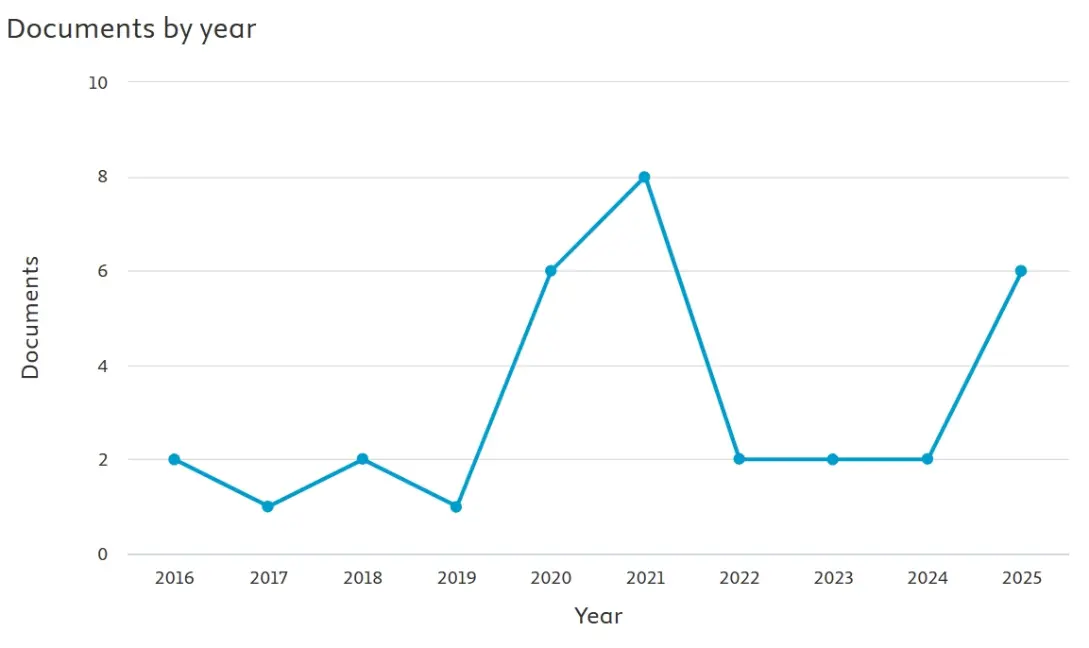
Regarding the evolution of fuzzy logic, from type-1 to type-2 and type-3, we can say that the search in Scopus with the keywords “type-2 fuzzy drones” produces only 32 documents at the moment. The evolution of type-2 fuzzy logic applied to drones is depicted in Figure 7, which indicates an increasing trend (on average) over the years. On the other hand, if we search for type-3 applied in drones in Scopus, there is only one recent paper published at the moment, which deals with a proposed observer-based type-3 fuzzy control for gyroscopes [28]. In our opinion, there exists a window of opportunity in this area, as type-2 and type-3 have, in theory, the capability of handling higher levels of uncertainty, which are always present in drone navigation and control in real-world scenarios. We have to say that in a similar area (autonomous mobile robots), this has already happened, which is why we believe it would also be the case for drones. For this reason, we expect that more publications of type-2 and type-3 FL will continue to emerge in the future years, as problems in this area become more complex and higher precision levels become a more crucial factor.
Now we can analyze, with a density map, the authors with the most cited papers from 2017 to 2025. In this case, we plot the results for the top 45 authors for better visualization. Figure 8 illustrates, with a density map of colors the most important clusters of most cited authors in the area of fuzzy logic applied in drones (up to 45). Figure 9 illustrates the same density map, but reducing the number of top authors up to 30.
Density maps are visualization tools used to depict the concentration and intensity of research themes, keywords, or citations within a specific field of study. These maps transform complex bibliometric data into visual representations that highlight key research areas, emerging trends, and knowledge gaps. In this case, for Figure 8 and Figure 9, we are able to visualize the larger research groups working in fuzzy logic for drone applications. We have to mention that some of the top authors (like Bai and Santoso) can be noticed in these figures, jointly with their coauthors.
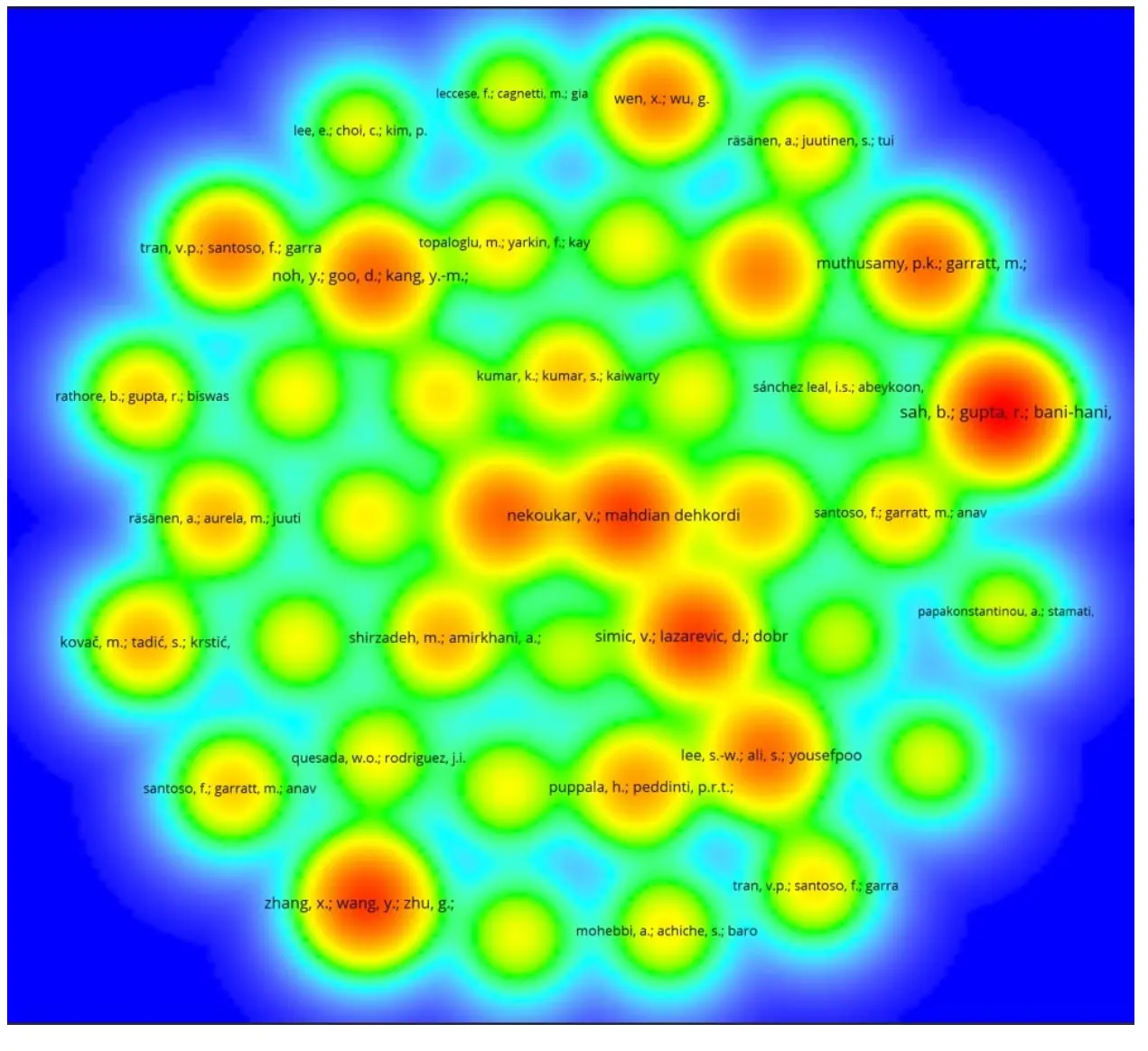
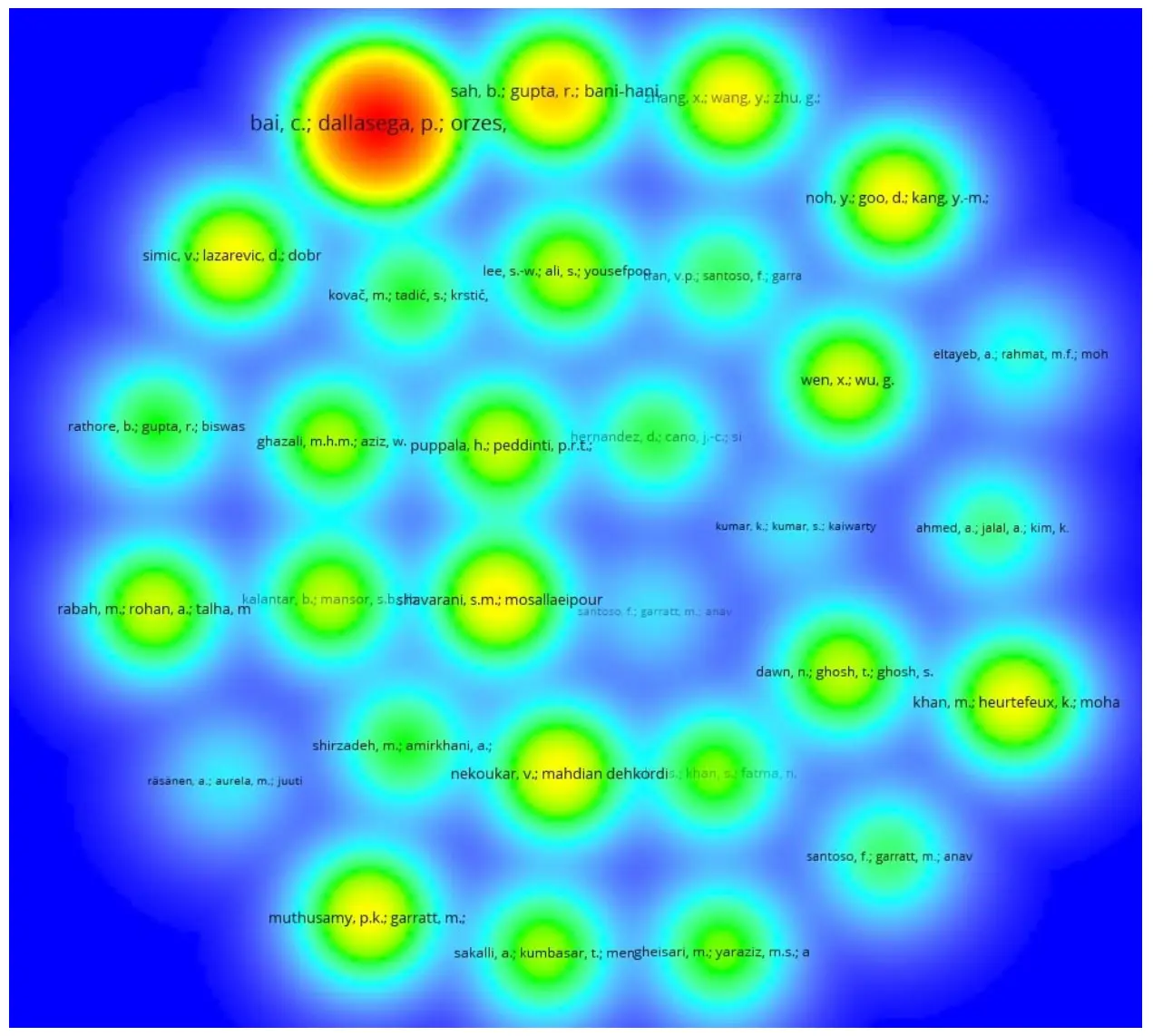
In both Figure 8 and Figure 9, we can note the names of the important authors in each of the clusters. For example, in Figure 9, the most cited author of Table 1 (Bai, C.) is clearly visible, and also the coauthors are shown in the same cluster.
4. Analysis and Future Trends: Fuzzy Logic Applied in the Drones Area
This section offers an analysis of data from Scopus and also envisions possible future trends in the application of fuzzy logic in the modeling, simulation, and control of drones, as well as their applications. Based on the publications that have been made in this area, we can say that most of the fuzzy logic papers that have been applied in this area have been of type-1 (this is most basic form of fuzzy logic), followed by type-2 (with 32 papers at the moment), and for type-3, only one paper has been published to the moment. Similar to what has happened in other areas, the future trend will be that higher types of fuzzy logic would be considered in the short term for being able to handle the higher levels of uncertainty in control and navigation of drones during flight. The main reason for this fact is that uncertainty is always present in controlling the motion and behavior of drones in real-world scenarios. In addition, we have to mention that there exist other recent areas of fuzzy logic, like intuitionistic fuzzy logic, Pythagorean, or hesitant fuzzy systems, which have not been considered in this review. However, we could expect these areas to become important in the near future as alternative ways of handling uncertainty, and thus there is a research opportunity to explore them and their applicability to drones.
On the other hand, based on Figure 5, we can notice that most applications of drones have been in engineering problems, and we think this trend will continue in the future. Of course, other areas, like Environmental Sciences and Energies, will also become more relevant in the near future. In addition, a very crucial topic that we believe would have a lot of attention in the near future is the optimization of the fuzzy systems used in control or navigation of drones, and in this respect, metaheuristic will play a key role. Metaheuristics are optimization and search methods based on nature inspiration that are easily applied in parameter tuning. At this moment, the most frequently used metaheuristics applied to drones are: genetic algorithms (GAs), particle swarm optimization (PSO), and ant colony optimization (ACO), but other, more recent ones have also been applied. In this regard, the utilization of swarm intelligent algorithms, like PSO, could help us in enabling the control and navigation of swarms of drones, which could be useful in some application areas.
Another important area is the utilization of neural networks (NNs) for drone applications, which is not the main focus of this paper, but there are also some papers in the state of the art that apply NNs in drone control or navigation. Also, in some cases, the use of NNs is in a hybrid form in combination with fuzzy logic. The main advantage of using NNs is that we can provide a learning capability to the fuzzy system, and then the fuzzy controller of the drone could be dynamically learning how to efficiently achieve tasks. In this regard, we believe that in the future there will also be combinations of NNs with type-2 and type-3 fuzzy systems for control and navigation of drones, so in this way achieving learning and also handling high level uncertainty.
Finally, we can mention the possibility of combining quantum computing with fuzzy inference systems, which has been considered recently, for realizing control and navigation of drones in real-world problems. At this moment, there are still limitations regarding processing times of quantum systems, but we envision that in the near future, there could be a technological advance that could enable the processing in real-time of quantum fuzzy systems that could enhance performance in real drone applications. At this moment, we are at the stage where we are able to control basic systems, like the inverted pendulum, but we expect this to evolve to more complex systems. Also, quantum metaheuristics could be used to optimize the parameters of fuzzy systems for drone control and navigation, potentially offering better results and performance in real-world problems. This statement is based on the fact that, in some optimization problems, quantum metaheuristics have been able to find solutions not reachable with classic metaheuristics, so it is possible that this could also happen in the drone area.
5. Conclusions
In this paper, we have outlined a review of the publications on FL in drone applications. Publications include papers in journals, proceedings, and edited books. The statistics of publications, authors, and institutions were presented, as well as the analysis of the data and future trends for the area of FL in drones were delineated. Based on the results and analysis, we believe that the type-2 and type-3 fuzzy areas are becoming very important topics in drone applications, and we expect that in the future more theoretical advances will occur, as well as new applications will be developed. In particular, this recent trend is justified by the need to handle higher degrees of uncertainty in the navigation and control of drones. A limitation of this study has been that other recent areas of fuzzy logic, like intuitionistic fuzzy logic, Pythagorean or hesitant fuzzy systems have not been considered in this review, but we could expect that these areas could also become important in the near future as alternative ways of handling uncertainty. Also, we are not studying hybrid approaches with fuzzy, like neuro-fuzzy or evolving fuzzy systems, which can be an interesting subject from the point of view of making a fuzzy system to become dynamic or adaptive. Also, there has been recent work on optimizing the fuzzy systems in drone applications with metaheuristics, similar to other applications, like the ones in [64,65], that we expect to be very relevant in the future, as fuzzy systems need to be optimally designed for achieving the best results in real-world applications. In addition, a particular type of metaheuristics, called swarm intelligent algorithms (such as PSO), could be used as inspiration to achieve collective behavior in swarms of drones, and this is also a very interesting and promissory area of research that is worthy of some future work. Finally, the utilization of quantum metaheuristics [66] in optimizing fuzzy drone control and navigation would be another possible line of future research that could render fruitful results in this application area, although at the moment, quantum computing is still at the beginning stages and would have to be used only in an offline mode (optimizing the design before using the fuzzy system). In any case, in the future with the advances in technology, we believe that it will be possible to also use it in an online fashion, so that the fuzzy systems could be dynamically evolving in real-time.
Acknowledgments
We aknowledge the support of our institution and TecNM (Tecnologico Nacional de Mexico).
Author Contributions
P.M. Performed the analysis and search for the data, as well as produced the figures. O.C. proposed the concept and methodogy. P.M did write the initial draft of the paper. O.C. reviwed the draft and made corrections to obtain the final manuscript.
Ethics Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data can be available upon request.
Funding
This research received no external funding.
Declaration of Competing Interest
There are no conflicts of interest.
References
-
Zadeh LA. Fuzzy sets. Inf. Control. 1965, 8, 338–353. DOI:10.1016/S0019-9958(65)90241-X [Google Scholar]
-
Zadeh LA. Knowledge representation in Fuzzy Logic. IEEE Trans. Knowl. Data Eng. 1989, 1, 89–100. DOI:10.1109/69.43406 [Google Scholar]
-
Zadeh LA. The concept of a linguistic variable and its application to approximate reasoning. Inf. Sci. 1975, 8, 199–249. DOI:10.1016/0020-0255(75)90036-5 [Google Scholar]
-
Mendel JM, Bob John RI. Type-2 fuzzy sets made simple. IEEE Trans. Fuzzy Syst. 2002, 10, 117–127. DOI:10.1109/91.995115 [Google Scholar]
-
Ontiveros E, Melin P, Castillo O. Comparative study of interval Type-2 and general Type-2 fuzzy systems in medical diagnosis. Inf. Sci. 2020, 525, 37–53. DOI:10.1016/j.ins.2020.03.059 [Google Scholar]
-
Ontiveros-Robles E, Castillo O, Melin P. Towards asymmetric uncertainty modeling in designing General Type-2 Fuzzy classifiers for medical diagnosis. Expert Syst. Appl. 2021, 183, 115370. DOI:10.1016/j.eswa.2021.115370 [Google Scholar]
-
Castillo O, Castro JR, Melin P. Interval Type-3 Fuzzy Systems: Theory and Design; Springer: Cham, Switzerland, 2022. [Google Scholar]
-
Qasem SN, Ahmadian A, Mohammadzadeh A, Rathinasamy S, Pahlevanzadeh B. A type-3 logic fuzzy system: Optimized by a correntropy based Kalman filter with adaptive fuzzy kernel size. Inform. Sci. 2021, 572, 424–443. DOI:10.1016/j.ins.2021.05.031 [Google Scholar]
-
Mohammadzadeh A, Sabzalian MH, Zhang W. An interval type-3 fuzzy system and a new online fractional-order learning algorithm: Theory and practice. IEEE Trans. Fuzzy Syst. 2020, 28, 1940–1950. DOI:10.1109/TFUZZ.2019.2928509 [Google Scholar]
-
Liu Z, Mohammadzadeh A, Turabieh H, Mafarja M, Band SS, Mosavi A. A New Online Learned Interval Type-3 Fuzzy Control System for Solar Energy Management Systems. IEEE Access 2021, 9, 10498–10508. DOI:10.1109/ACCESS.2021.3049301 [Google Scholar]
-
Singh D, Verma NK, Ghosh AK, Malagaudanavar AK. An Approach Towards the Design of Interval Type-3 T–S Fuzzy System. IEEE Trans. Fuzzy Syst. 2022, 30, 3880–3893. DOI:10.1109/TFUZZ.2021.3133083 [Google Scholar]
-
Wang JH, Tavoosi J, Mohammadzadeh A, Mobayen S, Asad JH, Assawinchaichote W, et al. Non-Singleton Type-3 Fuzzy Approach for Flowmeter Fault Detection: Experimental Study in a Gas Industry. Sensors 2021, 21, 7419. DOI:10.3390/s21217419 [Google Scholar]
-
Alattas KA, Mohammadzadeh A, Mobayen S, Aly AA, Felemban BF. A New Data-Driven Control System for MEMSs Gyroscopes: Dynamics Estimation by Type-3 Fuzzy Systems. Micromachines 2021, 12, 1390. DOI:10.3390/mi12111390 [Google Scholar]
-
Cao Y, Raise A, Mohammadzadeh A, Rathinasamy S, Band SS, Mosavi A. Deep learned recurrent type-3 fuzzy system: Application for renewable energy modeling/prediction. Energy Rep. 2021, 7, 8115–8127. DOI:10.1016/j.egyr.2021.07.004 [Google Scholar]
-
Amador-Angulo L, Castillo O, Castro J, Melin P. A New Approach for Interval Type-3 Fuzzy Control of Nonlinear Plants. Int. J. Fuzzy Syst. 2023, 25, 1624–1642. DOI:10.1007/s40815-023-01470-9 [Google Scholar]
-
Castillo O, Valdez F, Melin P, Ding W. A Survey on Type-3 Fuzzy Logic Systems and Their Control Applications. IEEE/CAA J. Autom. Sin. 2024, 11, 1744–1756. DOI:10.1109/JAS.2024.124530 [Google Scholar]
-
Ochoa P, Peraza C, Melin P, Castillo O, Park S, Geem ZW. Enhancing Control Systems through Type-3 Fuzzy Logic Optimization. Mathematics 2024, 12, 1792. DOI:10.3390/math12121792 [Google Scholar]
-
Song Z, Huang H. Safety-Critical Fixed-Time Formation Control of Quadrotor UAVs with Disturbance Based on Robust Control Barrier Functions. Drones 2024, 8, 618. DOI:10.3390/drones8110618 [Google Scholar]
-
Kuang J, Chen M. Adaptive Sliding Mode Control for Trajectory Tracking of Quadrotor Unmanned Aerial Vehicles Under Input Saturation and Disturbances. Drones 2024, 8, 614. DOI:10.3390/drones8110614 [Google Scholar]
-
Li Y, Wen D, Zhang S, Li L. Sequential Task Allocation of More Scalable Artificial Dragonfly Swarms Considering Dubins Trajectory. Drones 2024, 8, 596. DOI:10.3390/drones8100596 [Google Scholar]
-
Sui Y, Yang Z, Zhuo H, You Y, Que W, He N. A Fuzzy Pure Pursuit for Autonomous UGVs Based on Model Predictive Control and Whole-Body Motion Control. Drones 2024, 8, 554. DOI:10.3390/drones8100554 [Google Scholar]
-
Bai C, Dallasega P, Orzes G, Sarkis J. Industry 4.0 technologies assessment: A sustainability perspective. Int. J. Prod. Econ. 2020, 229, 107776. DOI:10.1016/j.ijpe.2020.107776 [Google Scholar]
-
Sah B, Gupta R, Bani-Hani D. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 2021, 24, 531–550. DOI:10.1080/13675567.2020.1782862 [Google Scholar]
-
Zhang X, Wang Y, Zhu G, Chen X, Li Z, Wang C, et al. Compound Adaptive Fuzzy Quantized Control for Quadrotor and Its Experimental Verification. IEEE Trans. Cybern. 2021, 51, 1121–1133. DOI:10.1109/TCYB.2020.2987811 [Google Scholar]
-
Nekoukar V, Mahdian Dehkordi N. Robust path tracking of a quadrotor using adaptive fuzzy terminal sliding mode control. Control Eng. Pract. 2021, 110, 104763. DOI:10.1016/j.conengprac.2021.104763 [Google Scholar]
-
Simić V, Lazarević D, Dobrodolac M. Picture fuzzy WASPAS method for selecting last-mile delivery mode: A case study of Belgrade. Eur. Transp. Res. Rev. 2021, 13, 43. DOI:10.1186/s12544-021-00501-6 [Google Scholar]
-
Ahmed A, Jalal A, Kim K. A novel statistical method for scene classification based on multi-object categorization and logistic regression. Sensors 2020, 20, 3871. DOI:10.3390/s20143871 [Google Scholar]
-
Zhang C, Du C, Sakthivel R, Mohammadzadeh A. Observer-based type-3 fuzzy control for gyroscopes: Experimental/theoretical study. Inf. Sci. 2025, 702, 121907. DOI:10.1016/j.ins.2025.121907 [Google Scholar]
-
Bilal H, Aslam MS, Tian Y, Ullah I, Ayouni S, Vasilakos AV. A Consumer Electronics-Enhanced UAV System for Agricultural Farm Tracking with Fuzzy SMO and Actuator Fault Detection Control Algorithms. IEEE Trans. Consum. Electron. 2025, 71, 6910–6923. DOI:10.1109/TCE.2025.3563993 [Google Scholar]
-
Alkabaa AS, Taylan O, Balubaid M, Mohammadzadeh A. A practical type-3 Fuzzy control for mobile robots: Predictive and Boltzmann-based learning. Complex Intell. Syst. 2023, 9, 6509–6522. DOI:10.1007/s40747-023-01086-4 [Google Scholar]
-
Hua G, Wang F, Zhang J, Alattas KA, Mohammadzadeh A, The Vu M. A New Type-3 Fuzzy Predictive Approach for Mobile Robots. Mathematics 2022, 10, 3186.DOI:10.3390/math10173186 [Google Scholar]
-
Puppala H, Peddinti PRT, Tamvada JP, Ahuja J, Kim B. Barriers to the adoption of new technologies in rural areas: The case of unmanned aerial vehicles for precision agriculture in India. Technol. Soc. 2023, 74, 102335. DOI:10.1016/j.techsoc.2023.102335 [Google Scholar]
-
Dawn N, Ghosh T, Ghosh S, Saha A, Mukherjee P, Sarkar S, et al. Implementation of Artificial Intelligence, Machine Learning, and Internet of Things (IoT) in revolutionizing Agriculture: A review on recent trends and challenges. Int. J. Exp. Res. Rev. 2023, 30, 190–218. DOI:10.52756/ijerr.2023.v30.018 [Google Scholar]
-
Jasim AN, Fourati LC, Albahri OS. Evaluation of Unmanned Aerial Vehicles for Precision Agriculture Based on Integrated Fuzzy Decision-Making Approach. IEEE Access 2023, 11, 75037–75062. DOI:10.1109/ACCESS.2023.3294094 [Google Scholar]
-
Gheisari M, Yaraziz MS, A Alzubi J, Fernández-Campusano C, Reza Feylizadeh M, Pirasteh S, et al. An efficient cluster head selection for wireless sensor network-based smart agriculture systems. Comput. Electron. Agric. 2022, 198, 107105. DOI:10.1016/j.compag.2022.107105 [Google Scholar]
-
Al Mashhadany YIM, Abbas AK, Algburi SS. Modeling and analysis of brushless DC motor system based on intelligent controllers. Bull. Electr. Eng. Inform. 2022, 11, 2995–3003. DOI:10.11591/eei.v11i6.4365 [Google Scholar]
-
Muthusamy PK, Garratt M, Pota H, Muthusamy R. Real-Time Adaptive Intelligent Control System for Quadcopter Unmanned Aerial Vehicles with Payload Uncertainties. IEEE Trans. Ind. Electron. 2022, 69, 1641–1653. DOI:10.1109/TIE.2021.3055170 [Google Scholar]
-
Lee M-FR, Chen Y-C, Tsai C-Y. Deep Learning-Based Human Body Posture Recognition and Tracking for Unmanned Aerial Vehicles. Processes 2022, 10, 2295. DOI:10.3390/pr10112295 [Google Scholar]
-
Tran VP, Santoso F, Garrat MA, Anavatti SG. Neural Network-Based Self-Learning of an Adaptive Strictly Negative Imaginary Tracking Controller for a Quadrotor Transporting a Cable-Suspended Payload with Minimum Swing. IEEE Trans. Ind. Electron. 2021, 68, 10258–10268. DOI:10.1109/TIE.2020.3026302 [Google Scholar]
-
Tubis AA, Ryczyński J, Żurek A. Risk assessment for the use of drones in warehouse operations in the first phase of introducing the service to the market. Sensors 2021, 21, 6713. DOI:10.3390/s21206713 [Google Scholar]
-
Leal IS, Abeykoon C, Perera YS. Design, simulation, analysis and optimization of pid and fuzzy based control systems for a quadcopter. Electronics 2021, 10, 2218. DOI:10.3390/electronics10182218 [Google Scholar]
-
Lagunes ML, Castillo O, Soria J, Valdez F. Optimization of a fuzzy controller for autonomous robot navigation using a new competitive multi-metaheuristic model. Soft Comput. 2021, 25, 1653–11672. DOI:10.1007/s00500-021-06036-1 [Google Scholar]
-
Karmakar R, Kaddoum G, Akhrif O. A PUF and Fuzzy Extractor-Based UAV-Ground Station and UAV-UAV Authentication Mechanism with Intelligent Adaptation of Secure Sessions. IEEE Trans. Mob. Comput. 2024, 23, 3858–3875. DOI:10.1109/TMC.2023.3284216 [Google Scholar]
-
Park Y, Ryu D, Kwon D, Park Y. Provably Secure Mutual Authentication and Key Agreement Scheme Using PUF in Internet of Drones Deployments. Sensors 2023, 23, 2034. DOI:10.3390/s23042034 [Google Scholar]
-
Wen X, Wu G. Heterogeneous multi-drone routing problem for parcel delivery. Transp. Res. Part C Emerg. Technol. 2022, 141, 103763. DOI:10.1016/j.trc.2022.103763 [Google Scholar]
-
Alsunbuli BN, Fakhruldeen HF, Ismail W, Mahyuddin NM. Hybrid beamforming with relay and dual-base stations blockage mitigation in millimetre-wave 5G communication applied in (VIOT). Comput. Electr. Eng. 2022, 100, 107953. DOI:10.1016/j.compeleceng.2022.107953 [Google Scholar]
-
Lee S-W, Ali S, Yousefpoor MS, Yousefpoor E, Lalbakhsh P, Javaheri D, et al. An Energy-Aware and Predictive Fuzzy Logic-Based Routing Scheme in Flying Ad Hoc Networks (FANETs). IEEE Access 2021, 9, 129977–130005. DOI:10.1109/ACCESS.2021.3111444 [Google Scholar]
-
Kumar K, Kumar S, Kaiwartya O, Kashyap PK, Lloret J, Song H. Drone assisted Flying Ad-Hoc Networks: Mobility and Service oriented modeling using Neuro-fuzzy. Ad Hoc Netw. 2020, 106, 102242. DOI:10.1016/j.adhoc.2020.102242 [Google Scholar]
-
Ali SS, Khan S, Fatma N, Ozel C, Hussain A. Utilisation of drones in achieving various applications in smart warehouse management. Benchmarking 2024, 31, 920–954. DOI:10.1108/BIJ-01-2023-0039 [Google Scholar]
-
Rathore B, Gupta R, Biswas B, Srivastava A, Gupta S. Identification and analysis of adoption barriers of disruptive technologies in the logistics industry. Int. J. Logist. Manag. 2022, 33, 136–169. DOI:10.1108/IJLM-07-2021-0352 [Google Scholar]
-
Tran VP, Santoso F, Garratt MA, Petersen IR. Fuzzy Self-Tuning of Strictly Negative-Imaginary Controllers for Trajectory Tracking of a Quadcopter Unmanned Aerial Vehicle. IEEE Trans. Ind. Electron. 2021, 68, 5036–5045. DOI:10.1109/TIE.2020.2988219 [Google Scholar]
-
Rashidzadeh E, Hadji Molana SM, Soltani R, Hafezalkotob A. Assessing the sustainability of using drone technology for last-mile delivery in a blood supply chain. J. Model. Manag. 2021, 16, 1376–1402. DOI:10.1108/JM2-09-2020-0241 [Google Scholar]
-
Kovač M, Tadić S, Krstić M, Bouraima MB. Novel Spherical Fuzzy MARCOS Method for Assessment of Drone-Based City Logistics Concepts. Complexity 2021, 2021, 2374955. DOI:10.1155/2021/2374955 [Google Scholar]
-
Nur F, Alrahahleh A, Burch R, Babski-Reeves K, Marufuzzaman M. Last mile delivery drone selection and evaluation using the interval-valued inferential fuzzy TOPSIS. J. Comput. Des. Eng. 2020, 7, 397–411. DOI:10.1093/jcde/qwaa033 [Google Scholar]
-
Shavarani SM, Mosallaeipour S, Golabi M, İzbirak G. A congested capacitated multi-level fuzzy facility location problem: An efficient drone delivery system. Comput. Oper. Res. 2019, 108, 57–68. DOI:10.1016/j.cor.2019.04.001 [Google Scholar]
-
Sepasgozar SME, Davis S. Digital construction technology and job-site equipment demonstration: Modelling relationship strategies for technology adoption. Buildings 2019, 9, 158. DOI:10.3390/buildings9070158 [Google Scholar]
-
Hernandez D, Cano J-C, Silla F, Calafate CT, Cecilia JM. AI-Enabled Autonomous Drones for Fast Climate Change Crisis Assessment. IEEE Internet Things J. 2022, 9, 7286–7297. DOI:10.1109/JIOT.2021.3098379 [Google Scholar]
-
Ghazali MHM, Rahiman W. Vibration-Based Fault Detection in Drone Using Artificial Intelligence. IEEE Sens. J. 2022, 22, 8439–8448. DOI:10.1109/JSEN.2022.3163401 [Google Scholar]
-
Räsänen A, Aurela M, Juutinen S, Kumpula T, Lohila A, Penttilä T, et al. Detecting northern peatland vegetation patterns at ultra-high spatial resolution. Remote Sens. Ecol. Conserv. 2020, 6, 457–471. DOI:10.1002/rse2.140 [Google Scholar]
-
Papakonstantinou A, Stamati C, Topouzelis K. Comparison of true-color and multispectral unmanned aerial systems imagery for marine habitat mapping using object-based image analysis. Remote Sens. 2020, 12, 554. DOI:10.3390/rs12030554 [Google Scholar]
-
Räsänen A, Juutinen S, Tuittila E-S, Aurela M, Virtanen T. Comparing ultra-high spatial resolution remote-sensing methods in mapping peatland vegetation. J. Veg. Sci. 2019, 30, 1016–1026. DOI:10.1111/jvs.12769 [Google Scholar]
-
Khan M, Heurtefeux K, Mohamed A, Harras KA, Hassan MM. Mobile Target Coverage and Tracking on Drone-Be-Gone UAV Cyber-Physical Testbed. IEEE Syst. J. 2018, 12, 3485–3496. DOI:10.1109/JSYST.2017.2777866 [Google Scholar]
-
Topaloglu M, Yarkin F, Kaya T. Solid waste collection system selection for smart cities based on a type-2 fuzzy multi-criteria decision technique. Soft Comput. 2018, 22, 4879–4890. DOI:10.1007/s00500-018-3232-8 [Google Scholar]
-
Castillo O, Melin P, Ontiveros E, Peraza C, Ochoa P, Valdez F, et al. A high-speed interval type 2 fuzzy system approach for dynamic parameter adaptation in metaheuristics. Eng. Appl. Artif. Intell. 2019, 85, 666–680. DOI:10.1016/j.engappai.2019.07.020 [Google Scholar]
-
Sanchez D, Melin P, Castillo O. Comparison of particle swarm optimization variants with fuzzy dynamic parameter adaptation for modular granular neural networks for human recognition. J. Intell. Fuzzy Syst. 2020, 38, 3229–3252. DOI:10.3233/JIFS-191198 [Google Scholar]
-
Valdez F, Melin P. A review on quantum computing and deep learning algorithms and their applications. Soft Comput. 2023, 27, 13217–13236. DOI:10.1007/s00500-022-07037-4 [Google Scholar]