Stand Still and Die: Integrating Multi-Stakeholder Communication to Bring Fairness Back to the Autonomous Vehicle Trolley Problem

Stand Still and Die: Integrating Multi-Stakeholder Communication to Bring Fairness Back to the Autonomous Vehicle Trolley Problem
Stephen R. Milford 1,2,* Victoria Laxton 3 Alexey Vinel 4,5
Received: 08 January 2026 Revised: 18 March 2026 Accepted: 22 April 2026 Published: 21 May 2026

© 2026 The authors. This is an open access article under the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).
1. Introduction
Autonomous Vehicles (AVs) are set to revolutionize our cities, offering numerous advantages, from improving traffic flow to reducing accidents and road deaths [1,2,3]. Yet they do not come without their challenges. If we are to realize these benefits, AVs must be widely adopted by the public. Research, however, suggests that the public is hesitant [4,5]. In 2017, 56% of US citizens claimed they would not want to ride in an AV if given the chance [6,7], while in 2019 63% of the US public stated they would feel unsafe as a pedestrian in a city with self-driving cars. Interestingly, 85% of the US public would not be comfortable with using an AV to transport their children or loved ones [8]. Apart from the serious technical challenges, the ethics of AVs on public roads are still to be worked out. These ethical questions are important for the public [9,10]. The public is specifically interested in how AVs behave on public roads, and in particular how they behave in collision scenarios [3,11,12]. There is at least some expectation that AVs should be as competent as a human driver before they are widely deployed, if not more so.
As any driver is keenly aware, sometimes one is faced with a no-win scenario. Do you swerve into oncoming traffic to avoid the unexpected child chasing a ball, or the man who has accidentally fallen over, as happened in October 2024 [13]? Numerous researchers downplay these scenarios, arguing that AVs will never face such dilemmas [14,15,16,17,18]. This, however, is simply unrealistic. When one considers that there are approximately 1.47 billion cars on the road globally [19] and that an average car travels (in the EU) 11,000 kilometres a year [20], one can estimate global annual mileage to be over 16 trillion kilometres. The World Health Organization (WHO) estimates that 1.3 million people die each year globally (with 50 million being injured) and that vulnerable road users (VRUs) are disproportionately affected [21]. Consequently, even if dilemma scenarios are rare, with such large numbers, these incredibly rare occurrences will still take place. As Fleetwood notes: those that deny the possibility of these scenarios ‘optimistically assert that, like omniscient, omnipotent beings, autonomous vehicles will be able to anticipate danger far enough ahead to avoid every potential mishap’ [22].
It is no wonder that many researchers contend that life-and-death dilemmas are inevitable [7,23,24,25,26]. How to deal with these dilemma scenarios has been the topic of much debate. However, it is possible to argue that the most popular way of framing these situations is in the form of trolley problems. First proposed by Philippa Foot in 1967 [27], the traditional gambit presents the unfortunate scenario of an unstoppable train carriage (a trolley) having to make the difficult choice of either staying on its path and killing five people tied to the tracks or turning onto a new track and killing one person. This gambit has been widely applied to AVs. Scenarios like these have captured the public’s imagination and received much media attention. What has gone unremarked is that while useful in certain circumstances, this framing fails to consider an important aspect of the real-world context of crash scenarios. In particular, it fails to consider that vulnerable road users are not passive bystanders to the situations that befall them but are active agents that can—and often do—take action during collisions.
This paper seeks to raise this important point. To do this, we will demonstrate the fundamental unfairness in the assumption that AVs are wholly responsible for the outcomes of collision situations. To return a sense of justice and fairness to the discussion around these dilemma situations requires that we consider VRUs as active agents. With this in mind, our paper considers highly theoretical ways one might include these active agents in decisions involving collision situations. We argue for a solution via Cooperative Intelligent Transportation Systems (C-ITS) and their main enabler—vehicular communication networks (V2X)—that integrate not only AVs, but also VRUs into the interaction protocols during unavoidable collisions. In our final section, we consider the types of communication most likely to elicit positive responses from VRUs, before highlighting some limitations and drawing this paper to a conclusion. It should be stressed that the aim of this paper is not to present an immediately deployable crash-management system, but to show that fairness debates in AV dilemma scenarios remain incomplete when they omit VRU agency and the possibility of bidirectional communication.
2. The Active Bystander
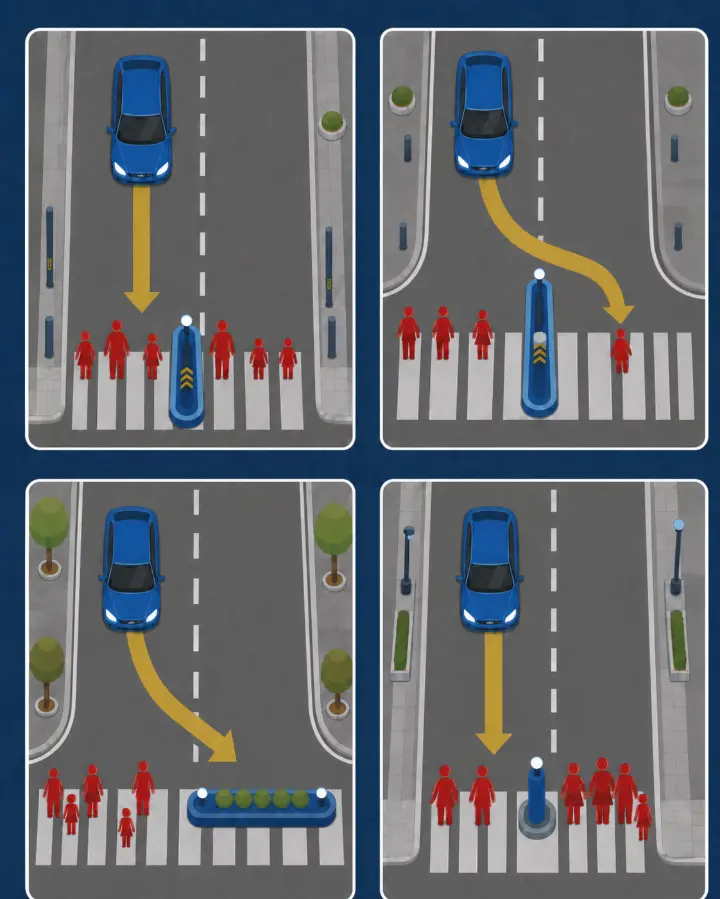
There are numerous studies that have attempted to grapple with the impossible choices posed by dilemma-rich collision situations involving AVs. Many of these studies have sought to use trolley-problem-like vignettes to investigate the responses of the public and drivers alike [28,29,30]. The most famous of these is MIT’s The Moral Machine Experiment [31]. Having garnered over 40 million responses, this study asked participants to list their preferred outcomes in a number of trolley-problem-like scenarios. The forms these dilemmas take are numerous, but the underlying conception can be divided into three broad types: (1) the AV has to choose whether to save one person or several people; (2) the AV must choose between different types of people, for example, young or old, legally compliant or non-compliant, or more or fewer people; or (3) the AV must decide whether to sacrifice its passenger to save others. In each case, it is the AV that must make a decision with the assumption that those who are at risk of dying are entirely passive. Pedestrians, cyclists, and other bystanders are presented more like objects than subjects, standing in unfortunate places without the ability to act—frozen in place (Figure 1). Within these studies, it is the AV that bears all responsibility, not only for the very event of the scenario (i.e., that it is the AV that caused the situation in the first place) but also for the outcome (who will live and die). VRUs might as well be inanimate objects, like expensive Ming vases that, while having incredible value, are entirely at the mercy of the AV.
This approach is true even for studies that attempt to integrate an ethical framework into the decision-making algorithms of AVs. Consider, for example, the work of Millan-Blanquel et al. [32], Wang et al. [12,33], or TUM’s recent work that has received much media attention [34]. These researchers have attempted to produce computer algorithms that integrate ethical theory into the decision-making algorithms of AVs. In the case of the team at TUM, one of the key touted benefits is an increase in fairness [35]. That is to say, they argue that their algorithmic approach is more ethical than other approaches because it increases fairness in inevitable dilemma scenarios. Yet these research models imply that it is the AV’s algorithm alone that is responsible for the outcome of a collision, and that programming these decision-making algorithms ethically will automatically increase the ethical outcome of a scenario. While it is highly probable that programming algorithms ethically increases the chance of an ethical outcome, and any such attempt should be applauded [36], the fact remains that VRUs are considered ‘uninvolved’ [37] bystanders that in many cases should be left alone at all costs. Even among researchers seeking to increase fairness and justice in such scenarios, the VRU is often seen as an object to be protected, rather than an active participant able to exercise free will and act in the face of what befalls them [11,24,38]. In these scenarios, VRU agency is almost never mentioned or considered. This, in itself, is unethical.
It is a well-established fact that human agency in the form of autonomy is a key ethical principle. Take, for example, the field of biomedical ethics. Here, four important principles are considered central: beneficence, non-maleficence, justice, and autonomy [39]. These principles are not independent of each other, but all work together to support ethical practice. These principles have implications for road traffic accidents that involve the life and death of human beings. This is particularly true of the principles of justice (which include fairness) and autonomy. It is arguable that these two principles are the most important of the four. They encapsulate the principles of benevolence and non-maleficence. More than this, they are closely linked in a reciprocal relationship. That is to say, people, as subjects (as opposed to objects), should have agency (wherever possible) over what befalls them if they are to live in a just and fair world. It is unjust to argue that an AV is the sole agent in trolley-problem scenarios and VRUs are merely passive bystanders who should be subjected to the will of a predetermined algorithm, no matter how ethically the algorithm appears to be designed. Such an approach denies the autonomy of the people for whom ethical algorithms are designed and, in so doing, diminishes justice and fairness. More than this, such an approach fails to take heed of the real-world context of collisions. VRUs are very rarely passive bystanders. Not only do they sometimes give rise to the dilemma scenarios in question, but they can—and often do—take action during a collision. Rarely do VRUs simply remain still when faced with impending death. VRUs will jump, run, brace themselves, etc. In some cases, non-involved VRUs will take action to prevent the injury of one or more people, such as in the case of an adult running into the street to pull a child out of harm’s way.
If our desire is to increase the ethical outcomes of AV collision scenarios and to promote concepts such as fairness and justice, then it is imperative that vulnerable road users are not seen as passive bystanders, but as agents that have the ability to take action, and in this way exercise some level of control over what befalls them. We should not ignore their active engagement in collision scenarios by trying to programme AV decision-making algorithms as if they were ethical demigods solely responsible for all that happens on the road. Rather, we should include the autonomy and agency of VRUs in our collision scenario planning. To recognise VRU agency is not the equivalent of assigning blame to VRUs for the outcomes of collision scenarios. It is to acknowledge that ethically relevant action may still be possible on their part even if they are not to blame for how the scenario is initiated or plays out.
At first, this may appear absurd. After all, collision situations very rarely offer the opportunity for stakeholder consultations. Yet it must be kept in mind that AVs participate in transport systems among a range of players (other AVs, human drivers, VRUs, etc.). An AV is not a ‘lone ranger’ among other lone rangers, but an agent representative [40] that acts within a highly connected system. The connected nature of collisions must be kept in mind if we are to promote fairness, especially among VRUs.
3. The Role of AV-to-VRU and VRU-to-AV Communications
To achieve this fairness, it must be established that communication between AVs is crucial for ethical decision-making in general. By communication, we mean time-critical exchanges intended to inform or shape the actions VRUs can take, rather than general signals with limited practical application. In this regard, V2X radio communication may be considered a technical enabler [41]. This is particularly important for collision scenarios involving VRUs if we are to encourage VRUs to become active actors. Being active in this context entails that it is not enough to inform VRUs about an impending accident. VRUs must be given the opportunity to take action. Consequently, the AV should be interested in knowing which actions might be taken by the VRU (or even attempt to encourage positive actions) so that they are incorporated into the ethical driving plan. Therefore, it is important that AVs and VRUs communicate in collision situations. How is this to be accomplished?
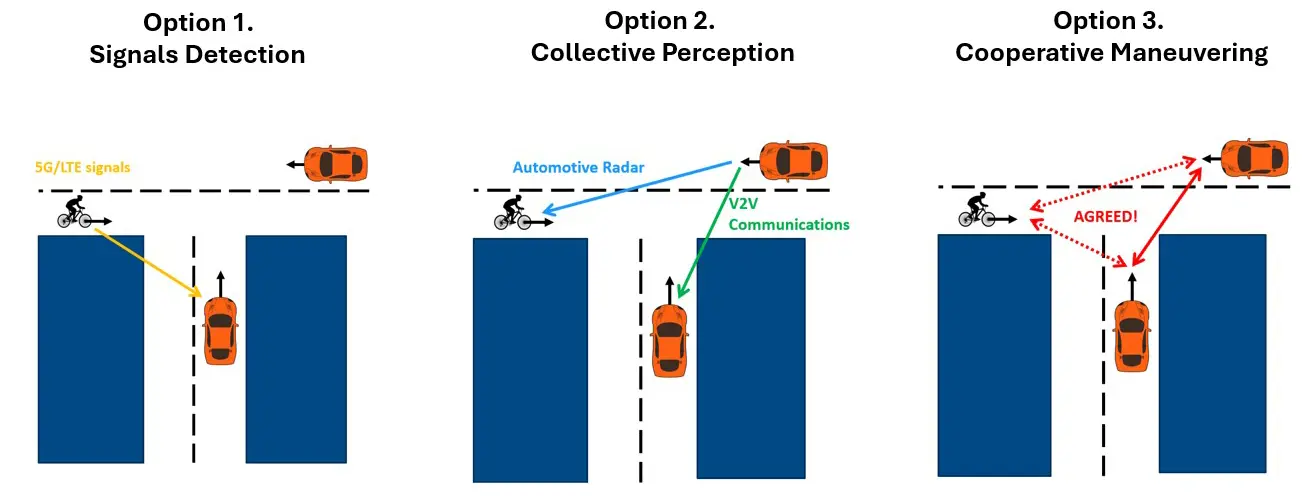
For collision scenarios involving VRUs, communication could be accomplished via visual or audio signs without V2X [42,43]. These could include gestures by a pedestrian toward the vehicle, a horn sounded by the vehicle, externally installed road signage (e.g., on the pavement, buildings incorporating billboards, or even council-installed purpose-built signage at known collision sites). One might even use external human-machine interfaces (e.g., images displayed on the car’s bonnet, such as a frowning/worried face). However, it is optimal for the VRU to be V2X instrumented (Figure 2). For instance, the VRU might have a communicating wearable device or a V2X-enabled smartphone [44]. The V2X-based approach has benefits not only because it is independent of weather and optical line-of-sight conditions, but foremost because it can communicate rich information that is difficult to retrieve implicitly. For example, it can communicate the planned trajectories of vehicles involved in the upcoming collision. That is to say, it is theoretically possible for the AV to communicate its intended path to a VRU, or perhaps more importantly, suggest to the VRU an action that could help ensure a more positive outcome in a collision.
Explicit communication helps in resolving scalability problems of one-to-one interactions between a single AV and a single VRU, which is inherent for non-cooperative systems. In addition, an important benefit of the use of V2X is timing: communication delay can be in the order of tens of milliseconds. The V2X communication can be either direct (in this case, a dedicated broadcast communication channel should be assigned) or via the cellular infrastructure—a telecommunication operator is involved [45]. To ensure ultra-low latency as well as high-reliability performance, it may be necessary to rely on 5G or 6G technology for both AVs and connected devices [46]. This naturally raises questions. The expected high density of VRUs in the city environment raises the issues of network congestion control due to the broadcast channel congestion or insufficient quality-of-service provisioning by the cellular network. In both cases, the VRU device is expected to be energy-constrained (thus, it might switch off due to battery drain). Cooperative autonomous vehicles are free from this restriction, but VRUs may not be.
To address the question of unfairness, when VRUs (which are already ‘vulnerable’ in traffic by definition) are negatively impacted by the restrictions of their communication devices (cheaper devices—worse battery; cheaper subscription plans—worse connection, etc.), it is desirable that the design of the V2X protocols allows for adequate ‘fair’ support of VRUs to compensate for the restrictions of their communication capabilities. Relevant technical solutions might include prioritization of VRU safety- and ethics-related messages over equivalent messages from the vehicles. Generally speaking, wireless network resource allocation principles should be coupled with the ethically motivated distribution of risks resulting from the potential collisions of a VRU and the autonomous vehicle. Prioritising VRU connectivity over vehicular connectivity might improve the fairness and decrease ‘vulnerability’ of VRUs.
To facilitate increased inclusiveness of VRUs into the connected system, the collective perception paradigm [47] might be applied when a VRU is not connected. Collective perception entails that either the vehicle ‘sees’ the VRU through its sensors and communicates this information to potentially interested road users (sounds a horn, displays a sign, or activates relevant lighting), or the same is done via the V2X-equipped road infrastructure. Therefore, we advocate for the need for collective perception for VRUs who either do or do not have a smart device during a collision. Cooperative AVs must help each other to incorporate non-connected VRUs in collision scenarios.
In order to increase fairness in collision scenarios involving AVs and VRUs, bidirectional communication is needed. Thus, the AVs should be informed about the VRUs and their possible or predicted actions. The VRUs should, in turn, be informed about AVs and their intended actions. Naturally, the intention-prediction capabilities of VRU wearable devices might be limited at the current state of development. Therefore, it is likely that VRU-to-AV communication is currently limited to reporting the current pedestrian status to the AVs. However, it would be desirable for the AV-to-VRU communication to explicitly include AV intentions. Consequently, in the future, the wearable device should issue a warning to enable a specific VRU reaction. This begs the question: What types of warning or communications might enable or encourage positive VRU action?
4. AV-VRU Communication: Lessons from the Science of Human-Machine Interaction
Designing communication frameworks that will elicit positive, healthy, and helpful responses from VRUs during a collision is of paramount importance. To this end, we might turn to the science of human-machine interaction (HMI) for guidance. In particular, we can draw on this field to identify the attributes necessary for the types of communication that would most likely enable VRUs to play active roles in a crisis. We would do well to consider the following attributes:
(1) Visual interaction with machines significantly influences how users respond. Therefore, clear and intuitive visual cues are vital to fostering positive and informed interactions between AVs and VRUs. To improve visual cues, attention should be paid to characteristics of the visual stimuli provided. First is colour. Colour can play a pivotal role in the acceptance of HMI information [48]. Warnings presented in certain colours may grab the VRU’s attention better than others. Typically, red is noted to stimulate physical performance [49] and can stress the urgency and safety-critical aspect of a warning. Colours such as blue, on the other hand, tend to be associated with lower levels of urgency and have less effect on the user’s attention [50,51]. Yet it should be borne in mind that predetermined associations with colours can result in confusion if used in a way that conflicts with these pre-existing associations and contexts. For example, red is commonly associated with stop signs or warning messages, while green is associated with a ‘go’ action or safety—e.g., fire door sign [52]. Where red, green, and blue colours cannot be used, research has demonstrated that cyan is regarded as a neutral colour in regard to a traffic context. Thus, it is a colour that may be open to being assigned new meanings, without causing confusion elicited by other colours [53].
Second, one should note the tone and hue, as well as the saliency, luminance, and conspicuity of a visual sign. There is ample evidence to show that these can all improve comprehension and compliance with information presented in a user’s visual search of a scene [54,55,56,57]. Tone has a more dominant effect than hue, with Suk and Irtel [58] having found subjects rated stimuli in vivid tones the most positive, arousing, and dominant across the different colour hues.
Third is the presentation of a warning as either text- or non-text-based information. Text-based visual cues have mixed effects for comprehension. A short text presented from an egocentric viewpoint of the VRU has been rated as clearer (e.g., walk, don’t walk) than allocentric messages about the car’s intent (e.g., braking, driving) [52,59,60]. Large text-based messages also provide direct information that makes it easy to understand the intent of the message [59]. However, there are arguments for the standardisation of any communication used between AVs and VRUs. Text-based language can be problematic across cultures, difficult for those with limited literacy skills (e.g., children), and difficult to read from a distance [61]. Instead, text could be used in positive ways to aid the comprehension of non-standardised symbols, in non-time-critical situations [62]. On the other hand, non-text-based intuitive display interfaces, featuring simple graphics and animations, could help to ensure that complex information is conveyed seamlessly and understood universally. Symbols are effective means of communication across cultures and can be easily standardised, unlike text-based information. Research has shown that VRUs have a good understanding of the warning signals typically used in AV HMIs and eHMIs. These include stop signs or an upraised hand. VRUs prefer such simple symbols that already have established concepts [63].
Interestingly, anthropomorphic interfaces or pictures, such as face icons, eyes, or waving hands, can cause confusion for VRUs and elicit surprised or curious responses. VRUs also report that while they understand the intention of vehicles equipped with such anthropomorphic features, there are concerns about the practicality of such designs in the real world and how the VRU would handle multiple AVs at one time displaying multiple, or even contradictory, anthropomorphic images [64,65].
Finally, augmented reality (AR) is another potential medium for visual communication that could be used to convey messages to VRUs. AR is a state-of-the-art technology that can augment virtual information into the real world in a way that results in users not losing their sense of the surrounding environment. This type of virtual information can be easily presented on an eHMI or to a VRU via wearable technology and has been shown to reduce cognitive load with individualised responses and clear signals/messages to the VRU [66]. However, there are concerns about using AR for external AV communications, including fears that AR may occlude the vehicle [67] or that VRUs would be required to wear specialised equipment [68] that may be inaccessible, unattainable, or impracticable for the majority of the population.
(2) Auditory stimulation. Outside of visual cues, simple sounds can be used effectively for AV communications. This could be alongside visual warnings to direct attention to relevant areas, or as a standalone warning. Many different sounds have been trialled and used in real-world instances. For example, for AV/VRU communication, Deb et al. [69] found that music and verbal messages presented by the AV led to shorter crossing times for pedestrians; however, a horn sound led to a longer crossing time. Mahadevan, Somanath, and Sharlin [70] found that audible voice messages presented by a car to the VRU were favoured. However, it was recognised that information overload may occur if multiple cars attempted to communicate at the same time and in the same location. Speech-based warnings may also result in slower understanding, due to the need to listen to the full message to understand the meaning before taking action.
Conversely, non-speech sounds and tones are more widely accepted due to rapid processing times and the applicability across cultures and languages. For auditory warnings, Ulfvengren [71] found that natural warning sounds should be pleasant to listen to rather than annoying; be compatible with the way the brain interprets and makes sense of auditory stimuli; be easy to learn and remember; and have natural meaning within the context of a user’s environment. However, in urgent situations, some level of annoyance may be desired [72]. Certain tones may also help enhance the visual task. For example, Seebold et al. [73] found that looming sounds, which increase in amplitude from sound onset to offset, improved reaction times when played during a visual search task compared to a no-sound condition. Research has also shown that looming sounds are not subjectively more alarming than other types of sound [74]. Consideration should be given to how sounds are perceived, as annoying sounds may lead to warnings being turned off or sounds becoming too commonplace so that users stop responding. We think, for example, of certain traffic contexts in which vehicles regularly sound their horns for non-urgent situations.
(3) Tactile stimulation. Haptic feedback could be used in conjunction with audio-visual warnings and implemented through everyday wearable or portable technology (e.g., smartphones or watches). This could be as a precursory alert when the VRU’s visual or auditory senses are already engaged, so as to draw their attention to a malfunctioning AV. However, the warning vibration would need to be strong enough that it is felt whilst the VRU is moving. The advantage of haptic feedback is that it is easily perceived during high cognitive load situations, when the visual and auditory senses are engaged elsewhere [75], and it has been shown to be more effective than other senses in emergency situations [76]. Haptic feedback is also easiest to recognise. Yet, the best results have been achieved when haptic feedback is used in a multimodal manner with visual and audio warnings [77]. Using a combination of all three senses reduces the risk of a warning being missed due to environmental factors such as noisy roads or bright sunlight. A communicative framework that combines all three attributes of sight, sound, and touch reduces warning reaction times by alerting VRUs to dangers through all sensory inputs.
There is ample precedent for the use of warning signs that integrate visual, auditory, and tactile senses. For example, in aviation, cockpit warning alerts use multimodal warnings (visual, auditory, and tactile) to improve pilot response times [78] while there are numerous calls for multimodal in-vehicle warnings to alert AV users of the need to take immediate control of the vehicle [79,80]. It should be noted that pilots are highly trained to interpret and respond to multimodal warnings, while most drivers today have at least some training in this regard. We argue here that the lessons learned from these contexts might be applied fruitfully to collision scenarios involving VRUs and AVs. This would increase agency among VRUs and, thereby, fairness, offering a more ethical outcome in dilemma scenarios involving AVs. These lessons may go beyond merely those of the types of warning systems drivers and pilots use, to include their training. Today, road safety courses are commonplace in community schools. It may be advisable to add training on how to respond to multimodal warning systems during a collision situation involving an AV to this curriculum.
5. Limitations
It must be acknowledged that at present our discussion is highly theoretical and presents immense challenges and limitations that must be taken into consideration. Many of the suggestions laid out in this paper would not be feasible using current technology. For example, V2X communications protocols are not well defined as yet, and the focus has been squarely placed on traffic safety (or efficiency) without incorporating the types of ethical concerns we have addressed here [81]. There are serious questions about how AVs could technically connect with VRU devices such as smartphones or watches—let alone the question of user permissions and data protection. Even if these challenges were to be solved, one would have to acknowledge the issue of connectivity inequality that has continued to plague much of the global community. Any ethically defensible communication framework must also remain attentive to accessibility, including the needs of people such as children, older adults, and disabled road users who may perceive or interpret warnings in a myriad of ways.
Furthermore, we are all too familiar with the increasing complexity of the transport infrastructure. Adding additional communications—signs, sounds, and haptic stimuli—may inundate VRUs, defeating the very purpose of the communication we are considering here. Rather than assisting VRUs to take better actions in both emergency and non-emergency situations, increasing communication between AVs and other road users may actually decrease users’ ability to take evasive actions in a collision. VRUs may simply be overwhelmed and take no action at all, or, worse still, take unhelpful actions that may increase injury.
Finally, we acknowledge the difficulty in predicting pedestrian actions, especially in the context of time-sensitive scenarios such as a collision. Although we should point out that for the last few decades, vehicles have traditionally sounded their horn in very urgent scenarios to alert VRUs of an impending collision, at present we are not aware of AVs doing the same. In addition, not all collision scenarios are time-sensitive. We are all familiar with ‘slow accidents’, for example, when ice or snow on a road prevents cars from stopping even at very slow speeds. Nevertheless, even in such non-urgent, serious scenarios, predicting the actions of VRUs will remain challenging.
6. Conclusions and Recommendations
Notwithstanding the limitations, the principles presented in this paper have value. Our arguments proposed in this article are intended to increase fairness in inevitable collision situations involving AVs by incorporating VRUs into decisions being made in the context of a crisis that ultimately affect VRUs themselves. This is not to say that moral responsibility should be transferred away from AV developers or regulators. On the contrary, our proposal extends the responsibility of those developing and regulating to include how they may incorporate VRUs as active participants. Rather than seeing VRUs as merely passive objects that have no say in what befalls them, we argue here that VRUs are moral agents themselves who very rarely remain stationary or inactive in emergency situations. Thus, developers and regulators should not consider AVs as the sole actors, nor should they be given sole responsibility for how a disaster unfolds. Rather, they should incorporate VRUs by communicating with them in collision scenarios.
While the specific content of an emergency communication will inevitably vary depending on the context, the attributes of the communication framework would do well to consider the elements we have outlined above. Incorporating visual, audio, and haptic stimuli into a coherent, holistic approach will encourage VRUs to take an active role in an emergency situation. This will go a long way to addressing the current artificial imbalance often presented in highly theoretical trolley-problem-like scenarios. Whatever communicative framework is decided upon, its designers should consider the basic elements outlined above. That is to say, designers should consider text- or non-text-based visual stimuli that take into account colour (perhaps even a new AV-specific cyan-like hue), tone, and saliency in both the real and virtual worlds. It should include audio stimuli (both spoken and non-spoken) that are pleasant or only slightly annoying as they increase in amplitude, and these should be used only in very specific situations. Were these to be combined with haptic feedback, the result may be a powerful motivator for VRUs to quickly and positively take an active role in crisis situations.
Achieving a fairer, more equitable outcome in collision scenarios involving AVs through connected communication among all road users requires support from multiple stakeholders. First, the regulatory and legal frameworks governing V2X communication protocols and AVs generally need to be robust. Both international and national transportation agencies need to coordinate their efforts to ensure consistency across jurisdictions so as to standardise AV communication protocols, mandate VRU-friendly AV design, and provide ethical oversight committees to ensure that where decisions are taken that impact VRUs, these users are included in those decisions as active participants and not as passive bystanders. Furthermore, better use of V2X frameworks, widespread implementation of new communicative networks such as 5G and 6G wireless communication, and prioritising warning messages for VRUs in contexts where resources (such as energy or communicative bandwidth) are limited are necessary.
These recommendations are founded on the ethical imperative of our argument and the current trajectory of the road context, whereby AVs are increasingly being connected not only to each other and the wider infrastructure but might be connected to VRUs as well. If this is to be taken seriously, the next step is empirical, interdisciplinary testing to identify which communicative formats actually improve comprehension, response, and fairness across all categories of VRUs.
Statement of the Use of Generative AI and AI-Assisted Technologies in the Writing Process
The authors used ChatGPT (OpenAI) to assist in generating a schematic figure for this manuscript. The output was subsequently reviewed, edited, and approved by the authors, who take full responsibility for the final content.
Acknowledgments
This paper is an extended version of a paper presented at The Seventeenth International Workshop on Selected Topics in Mobile and Wireless Computing—2024 [82].
Author Contributions
Conceptualization, S.R.M., V.L. and A.V.; Methodology, S.R.M., V.L. and A.V.; Writing—Original Draft Preparation, S.R.M., V.L. and A.V.; Writing—Review & Editing, S.R.M., V.L. and A.V.
Ethics Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Funding
We acknowledge the support of the KIT Future Fields Wild Ideas project “WildRobot”, Horizon Europe Project “CulturalRoad” (2024-2027), the ELLIIT Strategic Research Network, the NCCR Automation (Switzerland) a Swiss National Science Foundation-supported research activity, Grant ID: 180545.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
-
Floridi L, Cowls J, Beltrametti M, Chatila R, Chazerand P, Dignum MV, et al. AI4People—An Ethical Framework for a Good AI Society: Opportunities, Risks, Principles, and Recommendations. Minds Mach. J. Artif. Intell. Philos. Cogn. Sci. 2018, 28, 689–707. DOI:10.1007/s11023-018-9482-5 [Google Scholar]
-
Bertoncello M, Wee D. Ten Ways Autonomous Driving Could Redefine the Automotive World. McKinsey & Company. 2015. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/ten-ways-autonomous-driving-could-redefine-the-automotive-world (accessed on 22 August 2023).
-
Etienne H. The Dark Side of the “Moral Machine” and the Fallacy of Computational Ethical Decision-making for Autonomous Vehicles. Law Innov. Technol. 2021, 13, 85–107. DOI:10.1080/17579961.2021.1898310 [Google Scholar]
-
Faverio M. Older Americans More Wary Than Younger Adults About Prospect of Driverless Cars on the Road. Pew Research Centre. 24 October 2022. Available online: https://www.pewresearch.org/short-reads/2022/10/24/older-americans-more-wary-than-younger-adults-about-prospect-of-driverless-cars-on-the-road/ (accessed on 17 August 2023).
-
Rainie L, Funk C, Anderson M, Tyson A. AI and Human Enhancement: Americans’ Openness Is Tempered by a Range of Concerns. Pew Research Center. 2022. Available online: https://www.pewresearch.org/internet/2022/03/17/americans-cautious-about-the-deployment-of-driverless-cars/ (accessed on 17 August 2023).
-
Smith A, Anderson M. Automation in Everyday Life; Pew Research Center: Washington, DC, USA, 2017. [Google Scholar]
-
Rowthorn M. How should autonomous vehicles make moral decisions? Machine ethics, artificial driving intelligence, and crash algorithms. Contemp. Read. Law Soc. Justice 2019, 11, 9–14. DOI:10.22381/CRLSJ11120191 [Google Scholar]
-
Gross A. Consumer Skepticism Toward Autonomous Driving Features Justified. AAA Newsroom. 12 May 2022. Available online: https://newsroom.aaa.com/2022/05/consumer-skepticism-toward-active-driving-features-justified/ (accessed on 14 August 2023).
-
Gill T. Ethical Dilemmas are Really Important to Potential Adopters of Autonomous Vehicles. Ethics Inf. Technol. 2021, 23, 657–673. DOI:10.1007/s10676-021-09605-y [Google Scholar]
-
Liljamo T, Liimatainen H, Pöllänen M. Attitudes and concerns on automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 24–44. DOI:10.1016/j.trf.2018.08.010 [Google Scholar]
-
Andrade JA. The ethics of the ethics of autonomous vehicles: Levinas and naked streets. South. Afr. J. Philos. 2021, 40, 124–136. DOI:10.1080/02580136.2021.1933725 [Google Scholar]
-
Wang Y, Hu X, Yang L, Huang Z. Ethics dilemmas and autonomous vehicles: Ethics preference modelling and implementation of personal ethics setting for autonomous vehicles in dilemmas. IEEE Intell. Transp. Syst. Mag. 2023, 15, 177–189. DOI:10.1109/MITS.2022.3197689 [Google Scholar]
-
Luchian E. Tesla Crashes Into Oncoming Car, Saves the Life of a Pedestrian. Autoevolution. 15 October 2024. Available online: https://www.autoevolution.com/news/tesla-veers-to-avoid-pedestrian-who-fell-right-in-front-of-it-crashes-into-oncoming-car-241294.html (accessed on 4 February 2025).
-
Davnall R. The car’s choice: Illusions of agency in the self-driving car trolley problem. In Artificial Intelligence; Brill Mentis: Leiden, The Netherlands, 2020; pp. 189–202. DOI:10.30965/9783957437488_013 [Google Scholar]
-
Hansson SO, Belin M-Å, Lundgren B. Self-driving vehicles—An ethical overview. Philos. Technol. 2021, 34, 1383–1408. DOI:10.1007/s13347-021-00464-5 [Google Scholar]
-
Evans K, de Moura N, Chauvier S, Chatila R, Dogan E. Ethical Decision Making in Autonomous Vehicles: The AV Ethics Project. Sci. Eng. Ethics 2020, 26, 3285–3312. DOI:10.1007/s11948-020-00272-8 [Google Scholar]
-
Cunneen M, Mullins M, Murphy F, Shannon D, Furxhi I, Ryan C. Autonomous vehicles and avoiding the trolley (dilemma): Vehicle perception, classification, and the challenges of framing decision ethics. Cybern. Syst. 2020, 51, 59–80. DOI:10.1080/01969722.2019.1660541 [Google Scholar]
-
Resnik DB, Andrews SL. A precautionary approach to autonomous vehicles. AI Ethics 2024, 4, 403–418. DOI:10.1007/s43681-023-00277-6 [Google Scholar]
-
Hedges & Company. How Many Cars Are There in the World in 2023? 2023. Available online: https://hedgescompany.com/blog/2021/06/how-many-cars-are-there-in-the-world/ (accessed on 10 November 2023).
-
Odyssee-Mure. Change in Distance Travelled by Car. 2021. Available online: https://www.odyssee-mure.eu/publications/efficiency-by-sector/transport/distance-travelled-by-car.html (accessed on 10 November 2023).
-
WHO. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2018. Available online: https://www.who.int/publications-detail-redirect/9789241565684 (accessed on 17 August 2023).
-
Fleetwood J. Public health, ethics, and autonomous vehicles. Am. J. Public Health 2017, 107, 532–537. DOI:10.2105/AJPH.2016.303628 [Google Scholar]
-
Nyholm S, Smids J. The Ethics of Accident-Algorithms for Self-Driving Cars: An Applied Trolley Problem? Ethical Theory Moral Pract. 2016, 19, 1275–1289. DOI:10.1007/s10677-016-9745-2 [Google Scholar]
-
JafariNaimi N. Our Bodies in the Trolley’s Path, or Why Self-driving Cars Must *Not* Be Programmed to Kill. Sci. Technol. Hum. Values 2018, 43, 302–323. DOI:10.1177/0162243917718942 [Google Scholar]
-
Martinho A, Herber N, Kroesen M, Chorus C. Ethical issues in focus by the autonomous vehicles industry. Transp. Rev. 2021, 41, 556–577. DOI:10.1080/01441647.2020.1862355 [Google Scholar]
-
Robinson J, Smyth J, Woodman R, Donzella V. Ethical Considerations and Moral Implications of Autonomous Vehicles and Unavoidable Collisions. Theor. Issues Ergon. Sci. 2022, 23, 435–452. DOI:10.1080/1463922X.2021.1978013 [Google Scholar]
-
Foot P. The Problem of Abortion and the Doctrine of Double Effect. Oxf. Rev. 1967, 5, 5–15. Available online: https://philpapers.org/archive/FOOTPO-2.pdf (accessed on 10 November 2023).
-
Bergmann LT, Schlicht L, Meixner C, König P, Pipa G, Boshammer S, et al. Autonomous vehicles require socio-political acceptance—An empirical and philosophical perspective on the problem of moral decision making. Front. Behav. Neurosci. 2018, 12, 31. DOI:10.3389/fnbeh.2018.00031 [Google Scholar]
-
Shah MU, Rehman U, Iqbal F, Hussain M, Wahid F. An alternate account on the ethical implications of autonomous vehicles. In Proceedings of the 2021 17th International Conference on Intelligent Environments (IE), Dubai, United Arab Emirates, 21–24 June 2021; pp. 1–5. [Google Scholar]
-
Altay BC, Boztas AE, Okumuş A, Gul M, Çelik E. How will autonomous vehicles decide in case of an accident? An interval type-2 fuzzy best–worst method for weighting the criteria from moral values point of view. Sustainability 2023, 15, 8916. DOI:10.3390/su15118916 [Google Scholar]
-
Awad E, Dsouza S, Kim R, Schulz J, Henrich J, Shariff A, et al. The Moral Machine Experiment. Nature 2018, 563, 59–64. DOI:10.1038/s41586-018-0637-6 [Google Scholar]
-
Millan-Blanquel L, Veres SM, Purshouse RC. Ethical considerations for a decision making system for autonomous vehicles during an inevitable collision. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; pp. 514–519. [Google Scholar]
-
Wang H, Huang Y, Khajepour A, Cao D, Lv C. Ethical decision-making platform in autonomous vehicles with lexicographic optimization based model predictive controller. IEEE Trans. Veh. Technol. 2020, 69, 8164–8175. DOI:10.1109/TVT.2020.2996954 [Google Scholar]
-
Geisslinger M, Poszler F, Lienkamp M. An ethical trajectory planning algorithm for autonomous vehicles. Nat. Mach. Intell. 2023, 5, 137–144. DOI:10.1038/s42256-022-00607-z [Google Scholar]
-
Technical University of Munich. Autonomous Driving: New Algorithm Distributes Risk Fairly. 2022. Available online: https://www.tum.de/en/news-and-events/all-news/press-releases/details/autonomes-fahren-neuer-algorithmus-verteilt-risiken-fair (accessed on 10 November 2023).
-
Sylvester J, Raff E. Trimming the thorns of AI fairness research. IEEE Data Eng. Bull. 2020, 43, 74–84. Available online: http://sites.computer.org/debull/A20dec/A20DEC-CD.pdf#page=76 (accessed on 20 September 2023).
-
Hübner D, White L. Crash Algorithms for Autonomous Cars: How the Trolley Problem Can Move Us Beyond Harm Minimisation. Ethical Theory Moral. Pract. 2018, 21, 685–698. DOI:10.1007/s10677-018-9910-x [Google Scholar]
-
Liu H-Y. Irresponsibilities, inequalities and injustice for autonomous vehicles. Ethics Inf. Technol. 2017, 19, 193–207. DOI:10.1007/s10676-017-9436-2 [Google Scholar]
-
Beauchamp TL, Childress JF. Principles of Biomedical Ethics, 7th ed.; Oxford University Press: New York, NY, USA, 2013. [Google Scholar]
-
de Melo CM, Marsella S, Gratch J. Increasing fairness by delegating decisions to autonomous agents. In Proceedings of the 16th Conference on Autonomous Agents and Multiagent Systems, Sao Paulo, Brazil, 8–12 May 2017; pp. 419–425. [Google Scholar]
-
Sidorenko G, Thunberg J, Vinel A. Ethical V2X: Cooperative driving as the only ethical path to multi-vehicle safety. In Proceedings of the 2023 IEEE 98th Vehicular Technology Conference (VTC2023-Fall), Hong Kong, China, 10–13 October 2023; pp. 1–6. DOI:10.1109/VTC2023-Fall60731.2023.10333432 [Google Scholar]
-
Flores Comeca L, Masarykova N, Halinkovic M, Galinski M, Laskov P, Vinel A. Social Robots for Road Safety: Pedestrian Crossing Assistance Use-Case. In Proceedings of the 2025 International Symposium ELMAR, Zadar, Croatia, 2025; pp. 53–56. DOI:10.1109/ELMAR66948.2025.11193979 [Google Scholar]
-
Comeca ALF, Masarykova N, Halinkovic M, Galinski M, Laskov P, Vinel A. Robots for Safer Pedestrian Crossing on Two-Lane Roads. In Proceedings of the 2025 IEEE International Automated Vehicle Validation Conference (IAVVC), Baden-Baden, Germany, 2025; pp. 1–6. DOI:10.1109/IAVVC61942.2025.11219514 [Google Scholar]
-
Morold M, Bachmann M, David K. Toward context awareness for cooperative vulnerable road user collision avoidance: Incorporating related contextual information. IEEE Veh. Technol. Mag. 2022, 17, 75–83. DOI:10.1109/MVT.2022.3173075 [Google Scholar]
-
Molina OA, Ronelöv E, Boustedt K, Blidkvist J, Vinel A. Protection of vulnerable road users using hybrid vehicular networks. In Proceedings of the 2022 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Bogota, Colombia, 14–16 November 2022; pp. 1–6. DOI:10.1109/ICVES56941.2022.9986886 [Google Scholar]
-
Shah G, Zaman M, Saifuddin M, Toghi B, Fallah Y. Scalable Cellular V2X Solutions: Large-Scale Deployment Challenges of Connected Vehicle Safety Networks. Automot. Innov. 2024, 7, 373–382. DOI:10.1007/s42154-023-00277-6 [Google Scholar]
-
Delooz Q, Willecke A, Garlichs K, Hagau A-C, Wolf L, Vinel A, et al. Analysis and evaluation of information redundancy mitigation for V2X collective perception. IEEE Access 2022, 10, 47076–47093. DOI:10.1109/ACCESS.2022.3170029 [Google Scholar]
-
El Jouhri A, El Sharkawy A, Paksoy H, Youssif O, He X, Kim S, et al. The influence of a color themed HMI on trust and take-over performance in automated vehicles. Front. Psychol. 2023, 14, 1128285. DOI:10.3389/fpsyg.2023.1128285 [Google Scholar]
-
Hill RA, Barton RA. Red enhances human performance in contests. Nature 2005, 435, 293–293. DOI:10.1038/435293a [Google Scholar]
-
Friedrich M, Vollrath M. Urgency-based color coding to support visual search in displays for supervisory control of multiple unmanned aircraft systems. Displays 2022, 74, 102185. DOI:10.1016/j.displa.2022.102185 [Google Scholar]
-
Silic M. Understanding colour impact on warning messages: Evidence from US and India. In Proceedings of the 2016 CHI Conference Extended Abstracts on Human Factors in Computing Systems, New York, NY, USA, 7–12 May 2016; pp. 2954–2960. DOI:10.1145/2851581.2892276 [Google Scholar]
-
Bazilinskyy P, Dodou D, De Winter J. External human-machine interfaces: Which of 729 colors is best for signaling ‘please (do not) cross’? In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 3721–3728. DOI:10.1109/SMC42975.2020.9282998 [Google Scholar]
-
Dey D, Habibovic A, Pfleging B, Martens M, Terken J. Color and animation preferences for a light band eHMI in interactions between automated vehicles and pedestrians. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–13. DOI:10.1145/3313831.3376325 [Google Scholar]
-
Braun CC, Silver NC. Interaction of signal word and colour on warning labels: Differences in perceived hazard and behavioural compliance. Ergonomics 1995, 38, 2207–2220. DOI:10.1080/00140139508925263 [Google Scholar]
-
Wolfe JM. Guided search 6.0: An updated model of visual search. Psychon. Bull. Rev. 2021, 28, 1060–1092. DOI:10.3758/s13423-020-01859-9 [Google Scholar]
-
Shen Z, Zhang L, Li R, Hou J, Liu C, Hu W. The effects of color combinations, luminance contrast, and area ratio on icon visual search performance. Displays 2021, 67, 101999. DOI:10.1016/j.displa.2021.101999 [Google Scholar]
-
Young SL. Increasing the noticeability of warnings: Effects of pictorial, color, signal icon and border. Proc. Hum. Factors Soc. Annu. Meet. 1991, 35, 580–584. DOI:10.1518/107118191786754662 [Google Scholar]
-
Suk H, Irtel H. Emotional response to color across media. Color Res. Appl. 2010, 35, 64–77. DOI:10.1002/col.20554 [Google Scholar]
-
Ackermann C, Beggiato M, Schubert S, Krems JF. An experimental study to investigate design and assessment criteria: What is important for communication between pedestrians and automated vehicles? Appl. Ergon. 2019, 75, 272–282. DOI:10.1016/j.apergo.2018.11.002 [Google Scholar]
-
Eisma YB, Reiff A, Kooijman L, Dodou D, De Winter JCF. External human-machine interfaces: Effects of message perspective. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 30–41. DOI:10.1016/j.trf.2021.01.013 [Google Scholar]
-
Tabone W, de Winter J, Ackermann C, Bärgman J, Baumann M, Deb S, et al. Vulnerable road users and the coming wave of automated vehicles: Expert perspectives. Transp. Res. Interdiscip. Perspect. 2021, 9, 100293. DOI:10.1016/j.trip.2020.100293 [Google Scholar]
-
Mehrotra S, Wang M, Wong N, Parker JI, Roberts SC, Kim W, et al. Human-machine interfaces and vehicle automation: A review of the literature. Accid. Anal. Prev. 2022, 109, 18–28. Available online: https://aaafoundation.org/wp-content/uploads/2026/01/HMI-and-Automation-Design-Recommendations.pdf (accessed on 5 April 2026).
-
Löcken A, Wintersberger P, Frison A-K, Riener A. Investigating user requirements for communication between automated vehicles and vulnerable road users. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 879–884. DOI:10.1109/IVS.2019.8814027 [Google Scholar]
-
De Winter J, Dodou D. External human–machine interfaces: Gimmick or necessity? Transp. Res. Interdiscip. Perspect. 2022, 15, 100643. DOI:10.1016/j.trip.2022.100643 [Google Scholar]
-
Verma H, Pythoud G, Eden G, Lalanne D, Evéquoz F. Pedestrians and visual signs of intent: Towards expressive autonomous passenger shuttles. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2019, 3, 1–31. DOI:10.1145/3351265 [Google Scholar]
-
Tran TTM, Parker C, Wang Y, Tomitsch M. Designing wearable augmented reality concepts to support scalability in autonomous vehicle-pedestrian interaction. Front. Comput. Sci. 2022, 4, 866516. DOI:10.3389/fcomp.2022.866516 [Google Scholar]
-
Tabone W, Happee R, García J, Lee YM, Lupetti ML, Merat N, et al. Augmented reality interfaces for pedestrian-vehicle interactions: An online study. Transp. Res. Part F Traffic Psychol. Behav. 2023, 94, 170–189. DOI:10.1016/j.trf.2023.02.005 [Google Scholar]
-
Tong Y, Jia B, Bao S. An augmented warning system for pedestrians: User interface design and algorithm development. Appl. Sci. 2021, 11, 7197. DOI:10.3390/app11167197 [Google Scholar]
-
Deb S, Strawderman LJ, Carruth DW. Investigating pedestrian suggestions for external features on fully autonomous vehicles: A virtual reality experiment. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 135–149. DOI:10.1016/j.trf.2018.08.016 [Google Scholar]
-
Mahadevan K, Somanath S, Sharlin E. Communicating awareness and intent in autonomous vehicle-pedestrian interaction. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. DOI:10.1145/3173574.3174003 [Google Scholar]
-
Ulfvengren P. Design of natural warning sounds. In Proceedings of the 13th International Conference on Auditory Display, Montreal, QC, Canada, 26–29 June 2007. [Google Scholar]
-
Fagerlönn J, Alm H. Auditory signs to support traffic awareness. IET Intell. Transp. Syst. 2010, 4, 262. DOI:10.1049/iet-its.2009.0144 [Google Scholar]
-
Seebold P, Nam CS, He Y. Looming sounds as auditory warnings: Uses for enhancing visual contrast sensitivity? Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2023, 67, 908–913. DOI:10.1177/21695067231192411 [Google Scholar]
-
Waltrip MJ, Baldwin CL. Scalable auditory alarms. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018); Bagnara S, Tartaglia R, Albolino S, Alexander T, Fujita Y, Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 54–58. DOI:10.1007/978-3-319-96059-3_6 [Google Scholar]
-
Murata A, Kuroda T. Effects of auditory and tactile warning on drivers’ response to hazard under noisy environment. In Engineering Psychology and Cognitive Ergonomics; Harris D, Ed.; Springer International Publishing: Cham, Switzerland, 2015; pp. 45–53. DOI:10.1007/978-3-319-20373-7_5 [Google Scholar]
-
Politis I, Brewster S, Pollick F. Speech tactons improve speech warnings for drivers. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; pp. 1–8. DOI:10.1145/2667317.2667318 [Google Scholar]
-
Matviienko A, Ananthanarayan S, Borojeni SS, Feld Y, Heuten W, Boll S. Augmenting bicycles and helmets with multimodal warnings for children. In Proceedings of the 20th International Conference on Human-Computer Interaction with Mobile Devices and Services, Barcelona, Spain, 3–6 September 2018; pp. 1–13. DOI:10.1145/3229434.3229479 [Google Scholar]
-
Cockpit Warning Systems. 5 April 1997. Available online: https://www.aopa.org/news-and-media/all-news/1997/april/pilot/cockpit-warning-systems (accessed on 5 February 2025).
-
Yun H, Yang JH. Multimodal warning design for take-over request in conditionally automated driving. Eur. Transp. Res. Rev. 2020, 12, 34. DOI:10.1186/s12544-020-00427-5 [Google Scholar]
-
Geitner C, Biondi F, Skrypchuk L, Jennings P, Birrell S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 23–33. DOI:10.1016/j.trf.2019.06.011 [Google Scholar]
-
Kabil A, Rabieh K, Kaleem F, Azer MA. Vehicle to pedestrian systems: Survey, challenges and recent trends. IEEE Access 2022, 10, 123981–123994. DOI:10.1109/ACCESS.2022.3224772 [Google Scholar]
-
Milford SR, Laxton V, Vinel A. Integrating multi-stakeholder communication into autonomous vehicle trolley problem. In Proceedings of the 2024 20th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Paris, France, 21–23 October 2024; pp. 68–73. DOI:10.1109/WiMob61911.2024.10770323 [Google Scholar]