Found 25 results
Open Access
Article
11 March 2026Cost-Aware UAV Photogrammetric Mission Design: Experimental Trade-Offs Between Overlap, Geometry, and Mapping Quality
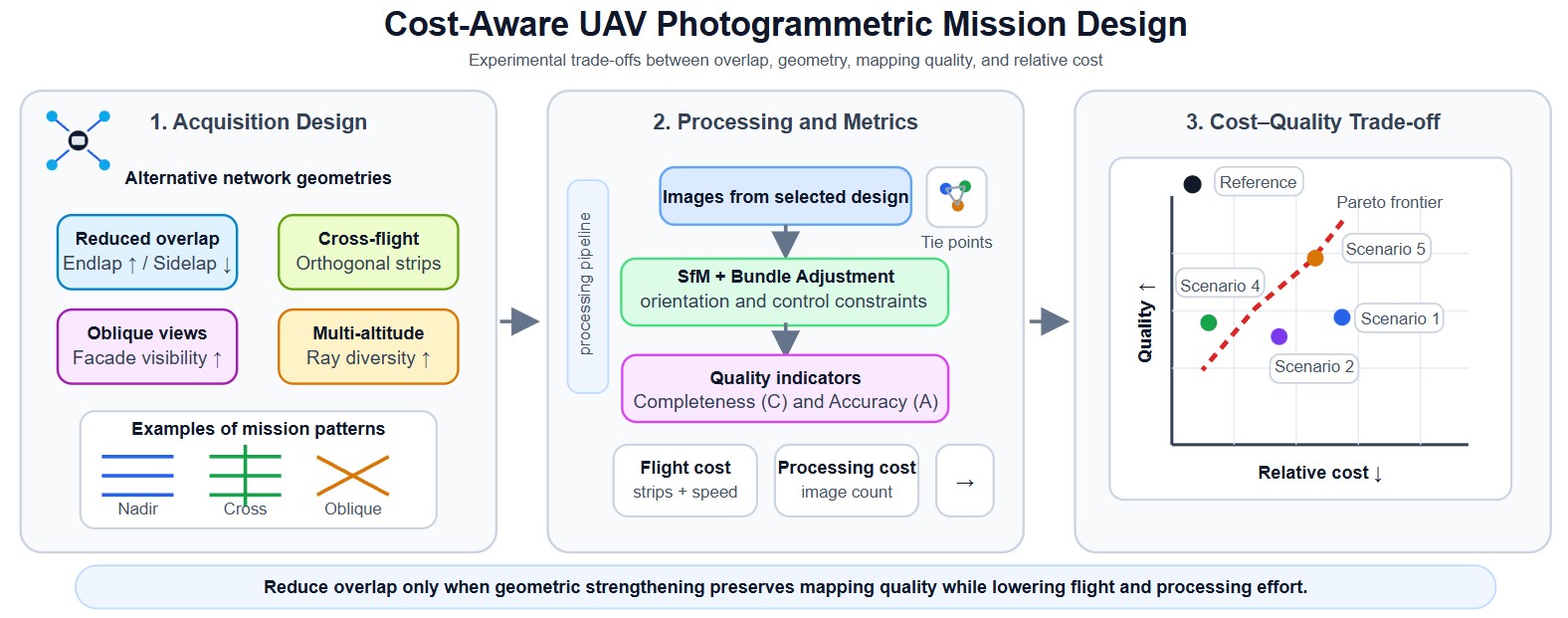
Unmanned Aerial Vehicle (UAV) photogrammetry enables high-resolution mapping and 3D reconstruction, yet operational and processing costs often scale rapidly with conservative mission designs (e.g., high overlap and redundant geometries). This paper presents an experimentally validated, cost-aware network-design study that quantifies cost–quality trade-offs in urban UAV photogrammetry. Five mission strategies—reduced sidelap with increased endlap, cross-flight compensation, partial high-overlap calibration, multi-altitude acquisition, and oblique cross-flight integration—are evaluated using a controlled experimental campaign over two urban test areas (2 × 20 ha), comprising 98 test blocks with overlaps ranging from 60% to 95%, sidelap from 20% to 80%, image counts from 70 to 2961, 7 check points, 15–17 ground control points, and GSD values between 2.6 cm and 4.6 cm, including nadir, oblique, cross-flight, and multi-altitude imagery. Each configuration is assessed using three indicators: (i) cost (flight and processing cost proxies), (ii) completeness, quantified by the number of reconstructed tie points, and (iii) accuracy, defined as a combined image–ground error at check points. Results show that cost reductions of over 50% in both flight and processing proxies can be achieved under the tested conditions while maintaining checkpoint accuracy comparable to a high-overlap reference configuration, provided that reduced overlap is compensated by stronger network geometry (e.g., cross-flight and/or oblique views). The analysis highlights product-dependent recommendations: vector map (MAP) generation can remain reliable even with very low sidelap (down to approximately 20%) when supported by adequate longitudinal overlap, whereas ortho-image mosaic (OIM) production requires at least moderate overlap in both directions (typically ≥60% endlap and sidelap) to ensure radiometric and geometric consistency. In contrast, dense 3D mesh reconstruction demands substantially stronger network geometry, including cross-flight and oblique imagery in addition to nadir views, with overlap levels exceeding 60% and preferably approaching 80%. These findings provide practical mission-planning guidelines that support efficient autonomous and semi-autonomous UAV mapping workflows.
Open Access
Article
05 March 2026Light-Guided Autonomous Drone Navigation for Indoor GPS-Denied Environments
Autonomous drones operating in indoor environments cannot rely on the global positioning system (GPS) signals for precise navigation due to severe signal attenuation and multipath interference in GPS-denied spaces. This paper presents a novel Li-Fi-based optical positioning, and combined with high-sensitivity photodiode sensor arrays, to enable robust drone guidance in challenging indoor environments where conventional radio-frequency localization fails. The proposed system uses strategically distributed ceiling-mounted Light Emitting Diode (LED) luminaires across the operational space, each transmitting unique identification codes through high-frequency light modulation at rates imperceptible to human vision, thereby maintaining dual functionality for simultaneous illumination and positioning. Unlike existing VLC positioning studies that focus on static receivers, our system integrates real-time optical localization directly into the UAV control loop at 120 Hz, achieving closed-loop autonomous navigation without GPS or RF assistance. The system demonstrates sub-decimetric positioning accuracy (<8 cm), low latency (4.2 ms), and operates successfully on resource constrained micro-UAV platforms (250 g quadcopter with STM32 microcontroller. OpenELAB Technology Ltd., Garching bei München, Germany). Experimental validation includes complex 3D trajectory tracking, multi-room scalability analysis, and quantitative comparison with existing localization technologies, confirming the viability of Li-Fi guided autonomous flight for practical indoor application.

Open Access
Article
04 March 2026Impact of Urban Topography and Infrastructure on Air Pollution Dispersion Using UAV-Based AQI Systems
Urban air quality reflects the combined effects of topography, built form, and emission sources, producing pronounced spatial and temporal variability in pollutant dispersion. This study investigates how urban morphological features-building density, green-space distribution, and transportation corridors-shape these dispersion patterns by deploying unmanned aerial vehicles (UAVs) equipped with Air Quality Index (AQI) sensors. Multi-altitude, high-resolution drone transects were conducted across contrasting urban settings to capture fine-scale pollutant distributions and their dynamics. The measurements reveal localized hotspots and zones of limited dispersion that align with variations in building layout, vegetation presence, and traffic intensity. Compared with fixed-site monitors, the UAV approach resolves vertical and horizontal gradients that are otherwise missed, providing complementary evidence of three-dimensional micro-scale heterogeneity. Taken together, the results indicate that decisions on urban design and infrastructure placement materially influence air-quality outcomes. These findings support the integration of UAV-based observations with conventional monitoring networks to inform targeted mitigation measures, exposure-aware mobility planning, and evidence-based strategies for public health and urban sustainability.

Open Access
Article
28 February 2026Euclid sUAV Handling Qualities Evaluation Through Flight Simulation, Using Cooper-Harper Handing Qualities Rating Scale
This article briefly presents the design steps, from the conceptual design up to flight simulation of the Euclid 3D printed small Unmanned Aerial Vehicle (sUAV). The use of valid tools and proper methodology implementation is essential throughout this entire path to render the aircraft’s kinematics properly in the flight simulator. The primary object of study in this article is the Euclid sUAV handling qualities evaluation through flight simulation, using Cooper-Harper Handing Qualities Rating Scale. A novel methodology consisting of eighteen flight tests is presented, each one evaluating a certain flight procedure. For each procedure, performing instructions are provided. This methodology can be used either as is, or modified, to evaluate the handling qualities of similar sUAV’s. Furthermore, a full video of the procedure is given for validation and replication purposes. The results from the application of the 18-step procedure for the Euclid sUAV, indicated that all scores fluctuated in the (1–3) score region. These score region is translated as satisfactory handling qualities, without improvement needed to the system, according to Cooper-Harper Handing Qualities Rating Scale.

Open Access
Article
25 February 2026Ecological Application of UAVs for Monitoring and Eliminating Oil Product Spills on the Sea Surface
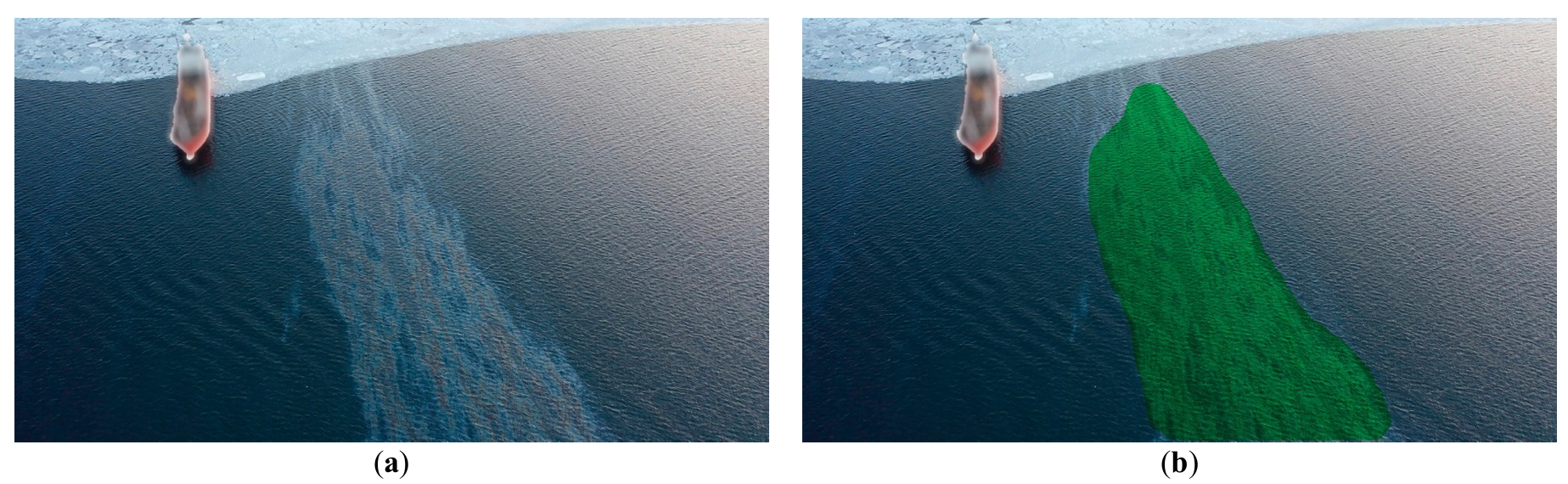
The objective of marine ecological safety necessitates the development of comprehensive, integrated strategies for oil spill management, encompassing advanced monitoring and effective remediation. This paper introduces and validates a novel integrated methodology and conceptual framework for autonomous marine environmental safety. The core of this framework lies in the merging of AI-assisted monitoring capabilities with a multi-agent Unmanned Aerial Vehicle (UAV) system for targeted dispersant delivery. UAV systems, within this methodology, function as a cost-effective and readily deployable operational platform. The study details the primary development stages of the methodology-driven system and presents empirical results from in-situ field trials. The framework leverages artificial intelligence (AI) tools developed and validated for slick monitoring, which execute primary segmentation for spill detection and subsequent secondary segmentation to categorize the slick into thickness uniformity maps. Datasets of actual marine oil slick imagery were compiled to facilitate robust deep learning of the underlying neural network architectures. The study explores scientific feasibility, specifically employing Laser-Induced Fluorescence (LIF) spectroscopy to classify oil product grades and assess the ecological impact of various remediation agents on local phytoplankton communities. This integrated method for spill response is underpinned by successful field validation results. The full methodology was tested during actual oil spill incidents in the waters of Peter the Great Bay from 2019 to 2024. The article presents experimental validation of a new concept and methodology of integrated environmental safety of marine areas by a multi-agent UAV system in the event of oil product spills.
Open Access
Article
04 February 2026Analysis of Sensor Locations in Drone Aided Environmental Monitoring System Using Computational Fluid Dynamics (CFD) Studies
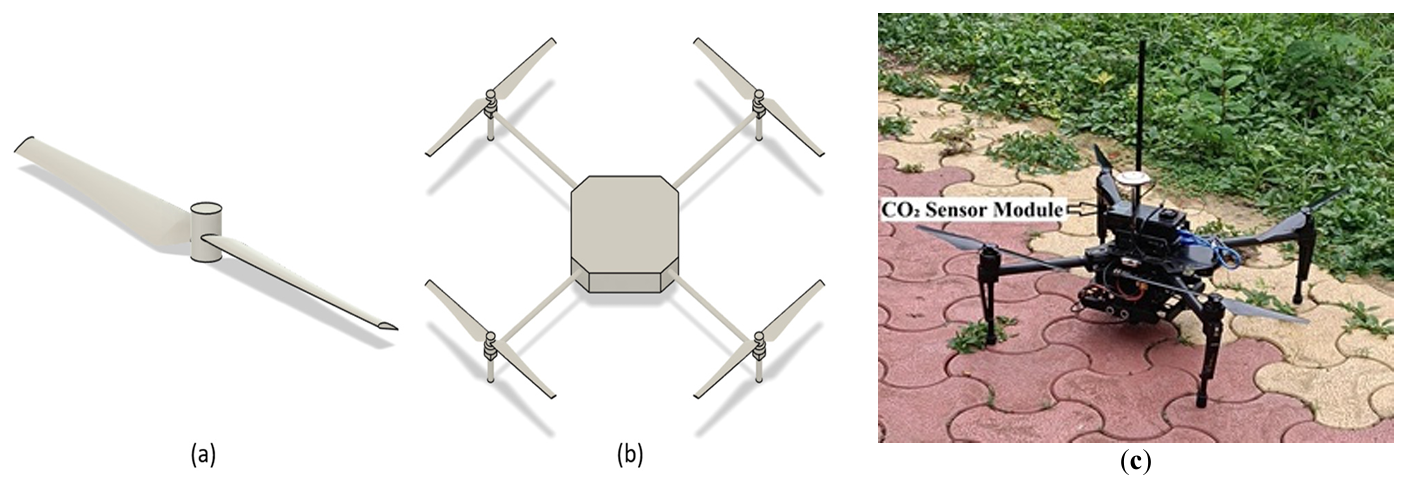
Recent advancements in unmanned aerial vehicle (UAV) technology have enabled flexible, high-resolution monitoring of atmospheric CO2, particularly in complex or otherwise inaccessible environments. This study employs Computational Fluid Dynamics (CFD) to investigate the downwash flow field of a quadcopter UAV in hover condition with the objective of identifying low-disturbance regions suitable for accurate atmospheric sensor placement. A quadcopter model was simulated using the SST k-ω turbulence model. Simulations were performed at rotor speeds ranging from 1000 to 6000 rpm. Results show that the strongest downwash and turbulence occur directly beneath the rotors, while airflow above the central fuselage and regions laterally distant from the rotors remain significantly calmer. The findings strongly recommend placing gas sensors either above the drone body or sufficiently far horizontally from the rotor plane to minimize measurement errors caused by propeller-induced flow.
Open Access
Article
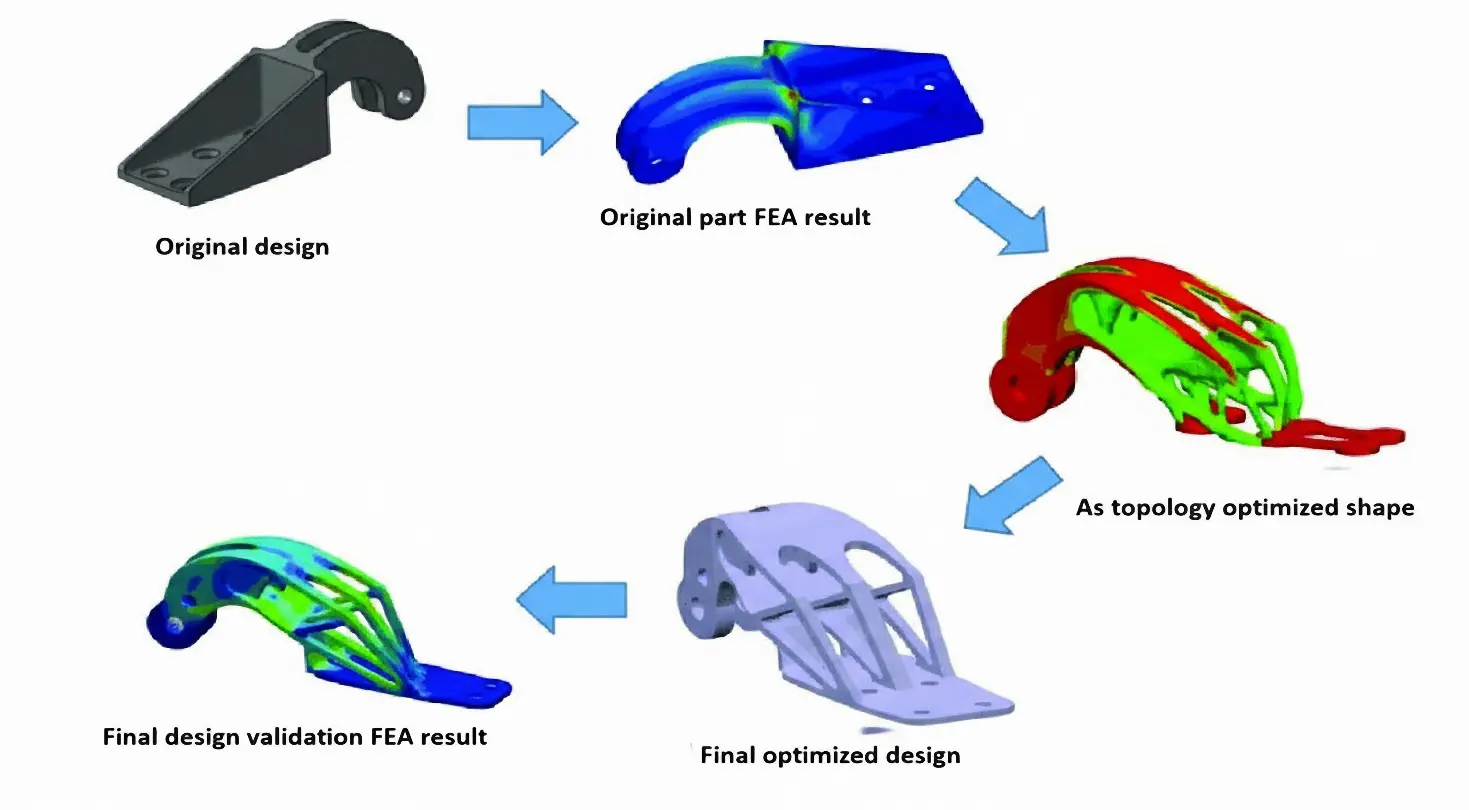
02 February 2026Topology Optimization for Drone Structure: Comprehensive Workflow Including Conceptual Modeling, Components Preparation and Additive Manufacturing
Payload drones are often limited more by frame weight than by motor power. This work aims to design, optimize, and validate a flat octocopter frame with eight independently driven rotors arranged symmetrically on separate arms. The drone frame design in SOLIDWORKS uses Finite Element Analysis (FEA) and topology optimization to remove material from low-stress regions while keeping the main load paths intact. The final design cuts the frame mass by 37.3% compared to the baseline model and reduces the 3D printing time by about five hours using a Creality K1C printer with Polylactic Acid (PLA) filament. These changes increase the available thrust-to-weight margin for payload without exceeding the allowable stress or deformation limits of the material. The electronic components also identified compatible flight controllers, ESCs, motors, and radio systems to show that the proposed frame can be integrated into a complete multirotor platform. Overall, this work demonstrates a practical approach to designing lighter octocopter frames that are easier to 3D print and can be used more effectively for delivery and inspection missions.
Open Access
Article
27 November 2025The Limits of RGB-Based Vegetation Indexes under Canopy Degradation: Insights from UAV Monitoring of Harvested Cereal Fields
Unmanned Aerial Vehicles (UAVs) equipped with RGB cameras are increasingly used as low-cost tools for crop monitoring, offering a range of vegetation indexes in the visible spectral range. These indexes have often been reported to correlate with other multispectral indexes such as the Normalized Difference Vegetation Index (NDVI) during active growth stages. However, still efforts should be done about their performance under conditions of canopy degradation. In this study, UAV flights were conducted over a cereal field immediately after harvest, when the canopy consisted mostly of bare soil and dry residues. RGB-based indexes were calculated from the orthomosaic, normalized to a [0–1] scale, and compared to NDVI derived from a multispectral sensor. Data preprocessing included ground control point (GCP) georeferencing, removal of NoData pixels, and raster alignment. Results revealed very weak correlations between RGB indexes and NDVI (Pearson r < 0.15), with Visible Atmospherically Resistant Index (VARI) showing almost no variability across the field. Although the Leaf Index (GLI), yielded the lowest error values, all RGB indexes failed to reproduce the variability of NDVI under post-harvest conditions. These findings highlight a critical methodological limitation: RGB indexes are unsuitable for vegetation monitoring when canopy cover is severely reduced. While they remain useful during active growth, their reliability diminishes in degraded or post-harvest scenarios, thereby limiting their application in assessing abiotic stress in cereals.

Open Access
Article
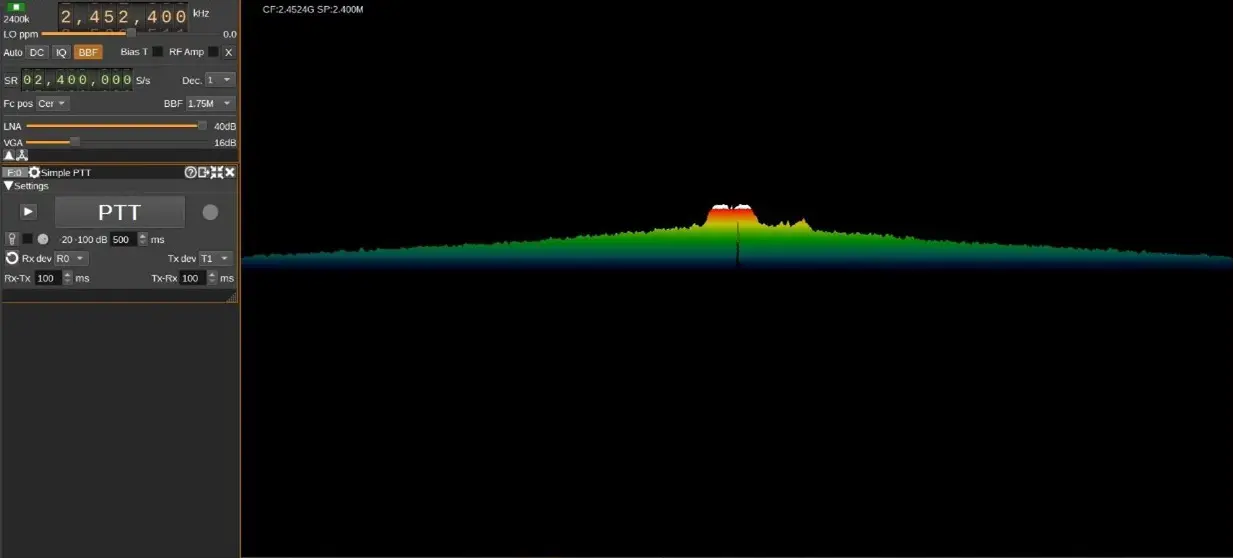
30 October 2025Smart Drone Neutralization: AI Driven RF Jamming and Modulation Detection with Software Defined Radio
The increasing use of wireless technologies in many aspects of people’s lives has led to a congested electromagnetic spectrum, making it critical to manage the limited available spectrum as efficiently as possible. This is particularly important for military activities such as electronic warfare, where jamming is used to disrupt enemy communication, self-attacking drones, and surveillance drones. However, current detection methods used by armed personnel, such as optical sensors and Radio Detection and Ranging (RADAR), do not include Radio Frequency (RF) analysis, which is crucial for identifying the signals used to operate drones. To combat security vulnerabilities posed by the rogue or unidentified transmitters, RF transmitters should be detected not only by the available data content of broadcasts but also by the physical properties of the transmitters. This requires faster fingerprinting and identifying procedures that extend beyond the traditional hand-engineered methods. In this paper, RF data from the drones’ remote controller is identified and collected using Software Defined Radio (SDR), a radio that employs software to perform signal-processing tasks that were previously accomplished by hardware. A deep learning model is then provided to train and detect modulation strategies utilized in drone communication and a suitable jamming strategy. This paper overviews Unmanned Aerial Vehicles (UAV) neutralization, communication signals, and Deep Learning (DL) applications. It introduces an intelligent system for modulation detection and drone jamming using Software Defined Radio (SDR). DL approaches in these areas, alongside advancements in UAV neutralization techniques, present promising research opportunities. The primary objective is to integrate recent research themes in UAV neutralization, communication signals, and Machine Learning (ML) and DL applications, delivering a more efficient and effective solution for identifying and neutralizing drones. The proposed intelligent system for modulation detection and jamming of drones based on SDR, along with deep learning approaches, holds great potential for future research in this field.
Open Access
Article
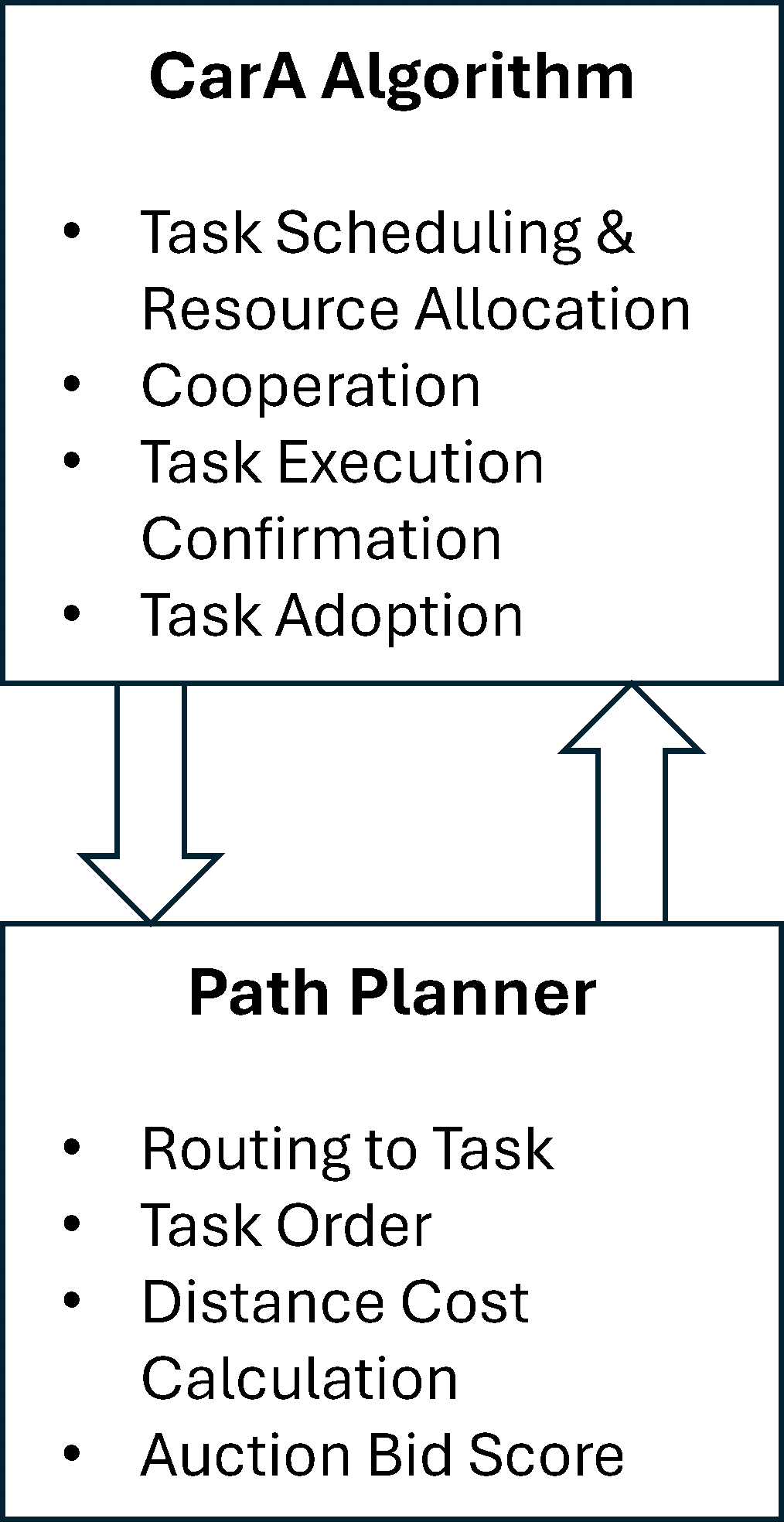
28 September 2025Integrated Consensus Framework for Task Assignment and Path Planning of a Degraded UAV Fleet
Unmanned aerial vehicle (UAV) systems can fail during civil and military operations. This presents a significant challenge for human teleoperators (remote pilots) in determining task reallocation after member loss within the fleet. To alleviate the high cognitive load on teleoperators in critical situations, a decentralized strategy was developed to resolve the combined task assignment and vehicle routing problems. This Integrated Consensus Framework (ICF) not only solves the combined problem but also adds a unique ability to identify the loss of a vehicle and dynamically reroute agents to abandoned tasks to achieve a satisfactory solution. ICF is a two-tiered approach that combines a novel algorithm, the Caravan Auction (CarA) algorithm, with a path-planning strategy to identify when UAVs are lost and reallocate orphaned tasks. The CarA Algorithm consists of three phases: auction, consensus, and validation phases. An experiment using Monte Carlo simulations was conducted to determine the performance of ICF. Teleoperators assigned to complete multiple tasks with UAVs in dangerous environments can allow the proposed system to perform task assignments and reallocation while offering only supervisory control as needed. The results indicate this novel approach provides comparable performance to existing strategies, doing so with the addition of randomized UAV loss.