Intelligent Real-Time Kanban Automation Using Ultra-Wideband Positioning: Methodologies and Performance Evaluation

Intelligent Real-Time Kanban Automation Using Ultra-Wideband Positioning: Methodologies and Performance Evaluation
Tiago Carvalho 1,* Gonçalo Rijo 2 Lio Gonçalves 1,3 Vasco Amorim 1,3 Vítor Filipe 1,3
Received: 21 January 2026 Revised: 24 February 2026 Accepted: 09 March 2026 Published: 19 March 2026

© 2026 The authors. This is an open access article under the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).
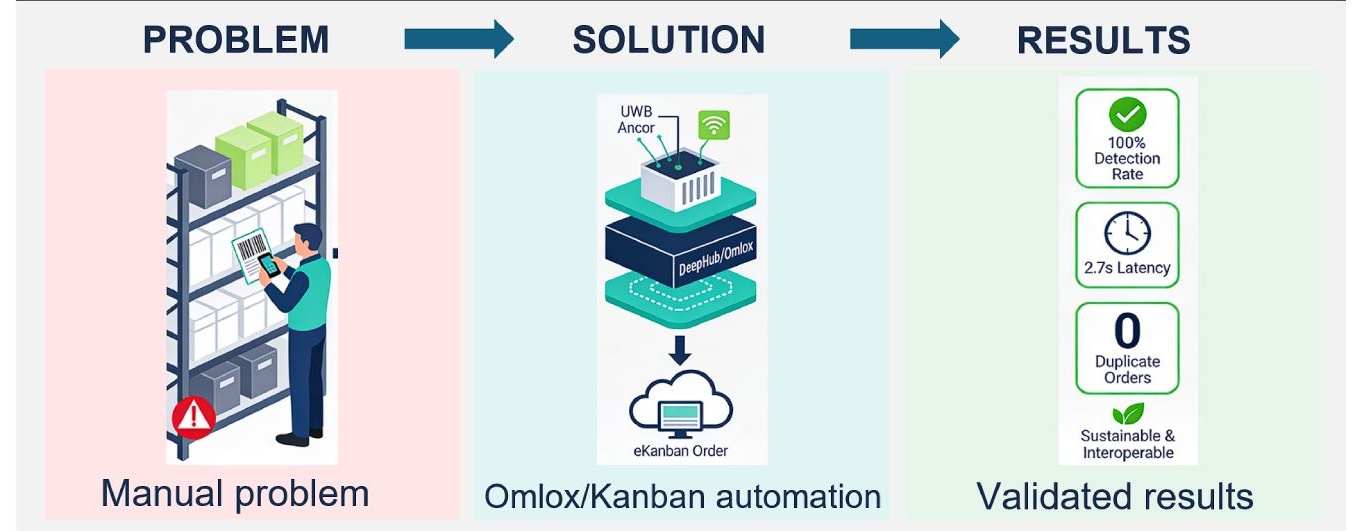
Graphical Abstract
1. Introduction
Growing demands for customization, reduced inventories, and shorter production cycles continue to challenge manufacturing systems [1], prompting increased attention to technologies that strengthen system responsiveness and eliminate process waste. Industry 4.0 embodies this shift through cyber–physical systems, pervasive sensing, and interconnected automation, enabling finer-grained and more timely coordination of material flows [2,3,4]. Lean manufacturing, although conceptually older, still provides the structural principles for achieving smooth flow and minimal waste; yet many lean tools, particularly Kanban, retain manual interactions that constrain their integration into digitally orchestrated environments [5,6,7,8,9,10]. Recent studies highlight that Lean and Industry 4.0 concepts are increasingly viewed as complementary, with digital technologies enhancing the execution of lean principles rather than replacing them [11,12,13,14,15]. In parallel, Logistics 4.0 research emphasizes digital coordination of material flows within smart factories [16,17].
Kanban has long served as a visual and physical pull mechanism for just-in-time replenishment [5,6]. However, physical card handling, manual scans, and local recording limit the timeliness and reliability of replenishment events. Electronic Kanban (eKanban) emerged to mitigate these issues [9], but most implementations still rely on discrete operator actions at predetermined stations. Consequently, the flow of information remains episodic rather than continuous, and replenishment logic often lacks real-time awareness of material movements.
Enhancing eKanban with real-time locating systems (RTLS) offers a pathway to continuous visibility and event-driven automation. UWB, Bluetooth Low Energy (BLE), and RFID are widely applied for indoor tracking, each with different trade-offs [18,19,20,21,22,23,24,25,26]. Among available technologies, UWB stands out for its sub-metre accuracy and resilience to multipath interference [27,28,29,30], yet fragmentation across proprietary vendor ecosystems remains a significant barrier to scalable adoption [31,32,33].
The Omlox standard seeks to address this fragmentation through a vendor-neutral interoperability framework [34,35,36], with DeepHub providing a fully compliant implementation capable of geofence management and real-time spatial event broadcasting [37].
The challenges outlined above, together with the emerging opportunities introduced by standardized locating technologies, situate the present work within a broader effort to integrate RTLS and lean production systems. Against this backdrop, the present work aims to determine whether a real-time locating infrastructure compliant with the Omlox standard can reliably automate eKanban replenishment by replacing discrete, operator-driven scans with geofence-based triggers derived from UWB positioning. To this end, a modular architecture middleware is developed that transforms continuous spatial data into replenishment events interpretable by a specific eKanban Lite platform. The study evaluates the responsiveness, detection reliability, and fault-recovery behaviour of the proposed architecture under controlled, yet operationally realistic, conditions. By providing empirical evidence on the behaviour of Omlox-enabled automation in a Kanban context, an area where practical validation remains limited, the work contributes to the broader integration of standardized RTLS and lean production systems. To contextualize the proposed architecture and position it relative to existing developments, the next section reviews foundational concepts and related research.
2. Background and Related Work
This section provides the conceptual and technological context for the proposed approach. First, the principles of lean production and Kanban-based replenishment are summarized, highlighting the role and limitations of electronic Kanban systems. Then, the core real-time locating system (RTLS) technologies are reviewed, with emphasis on ultra-wideband (UWB) and middleware interoperability challenges relevant to Industry 4.0 environments. Finally, recent developments in standardized locating frameworks that motivate the use of Omlox within lean material-flow systems are outlined.
Industry 4.0 introduces data-driven intelligence, integrated sensing, and real-time monitoring into manufacturing environments, enabling more adaptive and coordinated material flows [2]. Although conceptually older, lean manufacturing remains foundational to the pursuit of efficient, waste-free operations. Yet several lean tools, most notably Kanban, retain elements of manual interaction that limit their alignment with digitally orchestrated production systems.
Kanban has historically functioned as a visual and physical pull mechanism for just-in-time replenishment [5,6]. However, physical card handling, operator-initiated scans, and localized documentation can restrict replenishment responsiveness and reduce signal reliability. eKanban systems emerged to mitigate these shortcomings [9], though most implementations still depend on discrete operator actions at predefined stations. As a result, information flow often remains episodic rather than continuous, and replenishment logic lacks direct awareness of in-motion material assets. A representative example is Neoception’s eKanban Lite system, which digitizes Kanban replenishment by replacing physical cards with RFID-tagged containers that are scanned at fixed booking stations. Each scan represents an explicit “empty-bin” event that triggers a replenishment request within a central backend and, optionally, an ERP system. While this approach significantly reduces manual card handling and improves traceability, it remains inherently event-based and relies on correct operator interaction at specific locations, thereby limiting real-time visibility of material movements between stations [38].
Integrating RTLS into Kanban workflows offers a means to achieve continuous visibility and spatially driven automation. Technologies such as UWB, BLE, and RFID have been widely employed for indoor tracking, each providing different trade-offs in accuracy, range, and robustness [18,19,20,21]. UWB, in particular, is valued for its high accuracy and resilience to multipath interference [27,28]. UWB-based TDoA and TOF approaches enable high-precision range estimation [39,40], and the underlying signal structures exhibit robustness to multipath while supporting precise ranging [41], making the technology well suited for industrial environments. Nonetheless, even as RTLS technologies mature, practical adoption has been hampered by fragmentation across proprietary vendor ecosystems and limited cross-system interoperability [31]. Table 1 summarises representative prior work and positions the present contribution relative to existing approaches.
Table 1. Comparison of RTLS-based Kanban automation approaches.
|
Technology |
Domain |
Outcomes |
Limitations |
Omlox/Open Standard? |
|---|---|---|---|---|
|
UWB |
Automotive |
Automated replenishment via geofences; reduced inventory errors [7] |
High setup costs; proprietary stack [34] |
No |
|
BLE |
Electronics |
Real-time Kanban tracking; 10% less overstock [10] |
Metre-level accuracy limits geofenced automation [10] |
No |
|
RFID |
Electronics |
High proximity accuracy; faster inventory checks [20] |
Short range; no dynamic tracking [10] |
No |
|
Wi-Fi |
Logistics |
Broad coverage; real-time updates [42] |
1–2 m accuracy; high latency [42] |
No |
|
5G |
Manufacturing |
Sub-metre accuracy; low latency [19] |
High costs limit SME adoption [19] |
No |
|
Proprietary (e.g., Zebra) |
Mixed |
Robust tracking in complex layouts [21] |
Vendor lock-in; integration challenges [21] |
No |
|
UWB + Omlox (This work) |
Manufacturing |
Vendor-neutral geofence-driven eKanban; MAE ≤ 0.114 m; sub-second replenishment trigger |
Lab-scale validation; single-zone layout |
Yes (DeepHub) |
The introduction of the Omlox standard aims to overcome these challenges by defining a vendor-neutral framework for interoperability across heterogeneous locating infrastructures [34,35,36]. DeepHub, a commercially available and fully Omlox-compliant service, provides geofence management, spatial event streaming, and multi-technology integration capabilities [37]. Such middleware-driven interoperability aligns with broader cyber–physical integration trends discussed in recent manufacturing literature [43,44,45,46]. These advancements create conditions in which replenishment processes can evolve from operator-driven execution toward real-time, spatially triggered automation.
Together, these developments highlight both the potential and the current underexploration of standardized RTLS frameworks for automating pull-based material replenishment. Digital twin and smart logistics literature further highlight the importance of real-time spatial data in optimizing intra-factory material flow [47,48,49]. To examine how such an architecture behaves under controlled yet realistic operational conditions, the next section outlines the system design and experimental procedures used to implement and evaluate the proposed workflow.
3. Materials and Methods
This section details the architectural design, experimental setup, and evaluation methodology used to investigate the feasibility of automated, geofence-driven replenishment. To start the layered hardware–software architecture that enables continuous UWB positioning and spatial event processing is described. Follows an outline of the laboratory environment, calibration procedures, and geofence configurations used during testing. Finally, there is a definition of performance indicators used to quantify detection accuracy, latency, and robustness.
3.1. System Architecture
The proposed system follows a layered architecture comprising a hardware layer, a middleware processing layer, and an application layer for event-driven interaction with eKanban Lite. At the hardware level, three Decawave DW1000 UWB anchors were deployed in a triangular configuration to provide indoor positioning capabilities. A mobile UWB tag, representing a Kanban container, exchanged ranging messages with the anchors, which published the resulting distance measurements to the middleware via MQTT.
The overall workflow is illustrated in Figure 1. The process begins in the Python Server layer, marked by the rounded rectangle, which initiates the system’s one-time initialization sequence: obtain access tokens, start the token refresh thread, check entity existence, subscribe to WebSocket and MQTT, and finally start the event listening thread. Then, as anchor/tag communication happens in the Hardware layer, raw measurements undergo data validation invalid readings trigger an INVALID–RETRY COMMUNICATION loop back to the anchor/tag exchange, while valid readings cause the tag to send Data JSON to the middleware. Back at the Python Server layer, the incoming JSON data is used to calculate local tag position via trilateration, a moving average filter is applied to smooth short-term ranging noise and the result is forwarded as a Post location update to DeepHub. DeepHub waits for location updates and, upon receiving one, it compares the tag/zone position to evaluate whether the tag is inside a predefined geofence. If the tag is not inside, DeepHub returns to waiting. If the tag is inside, DeepHub creates a geofence event that will be used as a trigger. This trigger is consumed back in the Python Server, where the middleware filters WebSocket data to determine whether the event type indicates a trigger and, if no replenishment order is already active, sends shipment data to SIM via an API post. Finally, in the eKanban Lite layer, the shipment is created and continues to wait for the next event.
These geofence events were consumed by the middleware, which queried eKanban Lite to determine whether a replenishment order associated with the corresponding movement was already active. If no such order was found, the middleware automatically issued a new replenishment request via the platform’s REST API. The architecture implements token refresh and connection recovery logic for continuous operation; full protocol details are provided in Appendix A.

Figure 1. End-to-end middleware workflow illustrating UWB-based data acquisition, Python middleware processing, Omlox-compliant communication with DeepHub, geofence-triggered event generation, and automated replenishment requests in eKanban Lite.
Having defined the functional hardware–software stack, the next step was to deploy the system in a controlled environment in order to evaluate its operational behaviour under realistic movement conditions. The following subsection describes the laboratory and hardware configuration used during testing.
3.2. Experimental Setup
The experimental evaluation was conducted in a controlled laboratory environment, as shown in Figure 2, measuring 14.35 m × 6.61 m and configured to emulate a simplified production floor. Three UWB anchors (green circles in Figure 2) were mounted, forming a triangle at a height of 2.5 m to mitigate multipath reflections and maintain reliable line-of-sight coverage. During testing, a mobile tag was manually moved through the space, acting as a proxy for a Kanban container traversing production areas. As the tag moved, the system continuously captured range measurements, derived position estimates, and evaluated geofence crossings in real time.

Calibration of UWB hardware was conducted following vendor-recommended procedures to minimize systematic ranging bias and ensure stable trilateration performance. Full calibration steps and hardware configuration parameters are documented in Appendix A.
With the physical environment and positioning infrastructure established, an experimental protocol was designed to exercise the geofencing logic and simulate typical container movements. To structure these movements, virtual zones were defined within DeepHub as described below.
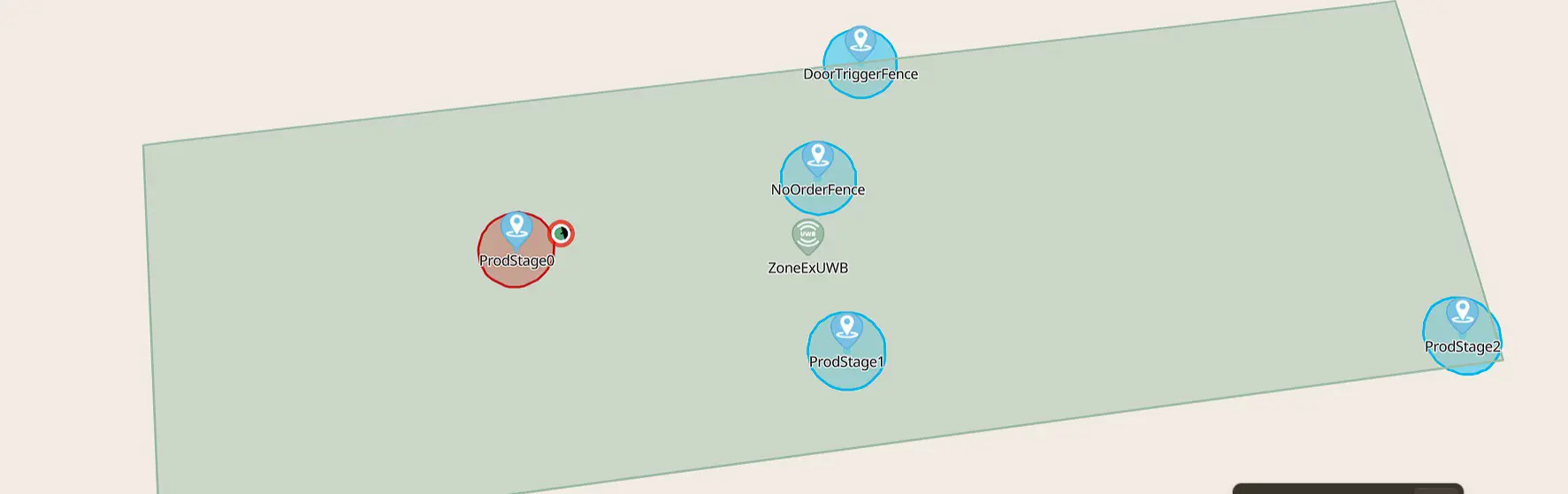
Fence Zones and Movement Protocol
Five virtual geofences were defined in DeepHub, represented as the colored circles in Figure 3, to structure the movement experiment: four intermediate zones (ProdStage0, ProdStage1, ProdStage2, NoOrderFence) for validating continuous tracking and one final zone (DoorTriggerFence) associated with replenishment triggering. When the mobile tag exited the replenishment zone, the middleware evaluated the state of eKanban Lite and created a replenishment request only if no corresponding order was already active. This prevented duplicate entries and maintained a consistent system state.

To quantify how effectively this zone-based logic performed during operation, a set of performance metrics was defined to capture detection accuracy, latency, and robustness. These metrics and their evaluation criteria are presented in the following subsection.
3.3. Performance Metrics and Evaluation Criteria
Three indicators were used to characterize system performance: trigger-to-action latency, detection success rate, and recovery time following authentication or connection interruptions. For each geofence event i, latency was defined as
| ```latexL_{\mathrm{T2A},i} = t_{\mathrm{order},i} - t_{\mathrm{entry},i}``` |
where tentry,i is the timestamp of DeepHub’s exit event, and torder,i is the time at which eKanban Lite registered the corresponding action.
The detection success rate was computed as
| ```latex\mathrm{TDSR} = \frac{N_{\mathrm{detected}}}{N_{\mathrm{actual}}} \times 100\%,``` |
where Ndetected denotes the number of geofence exit events correctly detected and handled by the middleware and Nactual represents the number of physical exits performed during the movement protocol. Recovery time quantified how quickly the middleware resumed operation after an error condition, expressed as
| ```latexT_{\text{recovery}} = t_{\text{reusable}} - t_{\text{trigger}},``` |
with ttrigger marking the moment of authentication failure or disconnection and treusable indicating restoration of full functionality.
Together, these methodological elements established the basis for evaluating responsiveness, reliability, and stability under both nominal and perturbed operating conditions.
4. Results
This section presents the empirical findings obtained from the functional and robustness experiments. It reports detection outcomes, latency measurements, and failure-recovery behaviour across all test runs. Quantitative results are complemented by visual confirmations from the middleware dashboard to validate geofence event detection and duplicate-order handling. Together, these results provide a basis for assessing the responsiveness and reliability of the proposed middleware workflow.
The experiment consisted of one primary functional run and two robustness runs, yielding a total of 140 geofence exit events. Across all events, the middleware achieved a 100% detection success rate and generated 26 valid order-creation attempts without producing duplicates. The average trigger-to-action latency was 2.7 s (SD = 0.78 s), and all authentication and connection disruptions were automatically resolved, resulting in uninterrupted operation. A summary of the main performance indicators is presented in Table 2.
Table 2. Experimental results summary.
|
Metric |
Result |
|---|---|
|
Total geofence triggers |
140 |
|
Fence detection success rate |
100% |
|
Order creation attempts |
26 |
|
Duplicate orders created |
0 |
|
Average trigger-to-action latency |
2.7 s |
|
Trigger-to-action standard deviation |
0.78 s |
|
Manual input required |
0 |
|
Token error count |
36 |
|
Average token recovery time |
0.26 s |
|
Number of disconnections |
4 |
|
Error recovery success rate |
100% |
The temporal responsiveness of the system was examined by comparing DeepHub’s geofence detection timestamps with the subsequent eKanban order-handling timestamps. Table 3 provides a representative sample of ten measurements extracted from the full data set.
Table 3. Sample latency measurements.
|
Run |
T1 |
T2 |
Latency (s) |
Status |
|---|---|---|---|---|
|
1 |
16:35:17.504 |
16:35:20.304 |
2.800 |
Created |
|
2 |
16:37:46.306 |
16:37:48.956 |
2.650 |
Skipped (exists) |
|
3 |
16:38:06.703 |
16:38:09.453 |
2.750 |
Skipped (exists) |
|
4 |
16:38:23.064 |
16:38:25.794 |
2.730 |
Skipped (exists) |
|
5 |
16:38:53.635 |
16:38:56.443 |
2.808 |
Skipped (exists) |
|
6 |
16:43:39.272 |
16:43:41.804 |
2.532 |
Skipped (exists) |
|
7 |
16:44:30.264 |
16:44:32.778 |
2.514 |
Skipped (exists) |
|
8 |
16:46:44.941 |
16:46:46.966 |
2.025 |
Skipped (exists) |
|
9 |
16:49:30.183 |
16:49:32.820 |
2.637 |
Skipped (exists) |
|
10 |
16:51:48.991 |
16:51:51.655 |
2.664 |
Skipped (exists) |
Visual confirmations in DeepHub supported the log-based detections. Fence entry and exit events were consistently highlighted through the dashboard visualization (Figure 4a,b), enabling manual verification of the geofence logic executed by the middleware.
 |
|
(a) Geofence entry event in DeepHub |
 |
|
(b) Geofence exit event in DeepHub |
Figure 4. Dashboard visualization of geofence events in DeepHub, showing (a) entry and (b) exit cues.
The middleware also demonstrated correct handling of duplicate-order conditions. When a replenishment order associated with the test identifier already existed, the system logged a skip action rather than issuing a redundant request. These skip events appeared as expected, as only one tag with one product associated was used, and confirmed that the duplicate-prevention logic was effective even during rapid sequential zone transitions.
System robustness was evaluated through induced network disruptions and token-expiration events. An error recovery rate of 100% was obtained as authentication failures triggered automatic token-refresh sequences, while dropped WebSocket connections were recovered without manual intervention. Across all robustness trials, reconnection and token acquisition were consistently achieved within approximately 0.26 s, allowing uninterrupted propagation of geofence events to eKanban Lite.
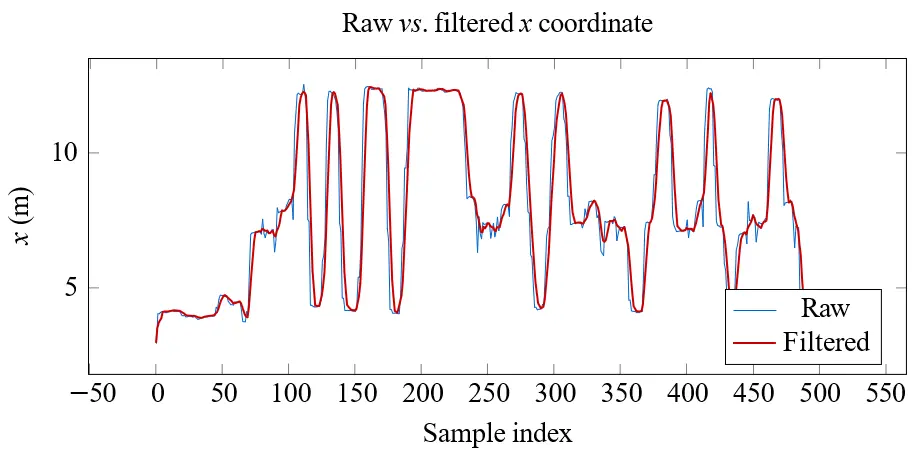
A simple moving-average filter with a window size of five samples was applied to the raw position estimates. The effect of the moving-average filter on positional stability is illustrated in Figure 5. Raw x-coordinate estimates exhibited characteristic UWB jitter, whereas filtered values produced smoother trajectories, thereby improving DeepHub’s geofence evaluation. This was particularly relevant near zone boundaries, where UWB ranging jitter—rather than tag velocity—represents the primary source of positional instability: without filtering, high-frequency noise of comparable magnitude to the boundary detection precision can cause the reported position to oscillate across a geofence edge even when the tag is carried at a steady walking pace, potentially generating spurious crossing events.
Taken together, these results show that the system maintained stable performance across normal and perturbed conditions, achieving reliable detection, low latency, and fully autonomous recovery behaviour. The operational implications of these findings for lean replenishment and Industry 4.0 integration are examined in the following section.
5. Discussion
This section interprets the experimental findings in relation to automated Kanban replenishment and Industry 4.0 integration. Latency sources are identified and characterized, the implications of achieving 100% detection performance are examined, and the system’s robustness under communication disturbances is discussed. Broader considerations, including scalability, deployment within complex industrial layouts, and interoperability with heterogeneous RTLS infrastructures, are additionally addressed.
The results indicate that combining UWB-based RTLS, DeepHub, and Neoception’s eKanban Lite provides a dependable foundation for automated replenishment signaling. The mean trigger-to-action latency of 2.7 s compares favourably with BLE-based Kanban automation approaches, where beacon transmission intervals alone are reported at 3000 ms [10], excluding processing and network propagation delays. This level of responsiveness is essential for stabilizing pull-driven material flows and minimizing the accumulation of waiting-related waste. A closer inspection of latency components indicates that the largest contributor to the mean 2.7 s trigger-to-action delay is not the geofence detection pipeline but the subsequent backend processing within the eKanban platform. Throughout the experiments, DeepHub emitted geofence exit events within approximately 100–300 ms of a boundary crossing, while REST-based replenishment creation and internal state validation at the application layer accounted for the remaining delay. This suggests that further latency reductions would require architectural modifications on the ERP-integrated replenishment backend rather than on the RTLS positioning or middleware layers alone.
The consistently correct detection of all 140 geofence exit events further demonstrates that UWB positioning, when paired with DeepHub’s real-time spatial event processing, can provide reliable operational behaviour suitable for just-in-time scenarios. The middleware’s ability to recover automatically from authentication expiry and temporary disconnections reinforces its suitability for environments where network disturbances and service restarts can occur during normal operation, aligning with findings in recent logistics and material-handling reviews that identify spatial awareness as a key enabler for automation [16]. Together, these behaviours show that automated replenishment signaling can be sustained without continuous operator oversight.
Although the experimental configuration successfully validated the concept, its scope was intentionally constrained. The evaluation involved a single mobile tag, a controlled indoor environment, and a simplified geometric layout. Similar experimental constraints are reflected in RTLS benchmarking studies, which emphasize the need for multi-tag and complex-layout validation [33]. These constraints do not diminish the contribution of the results but should be considered when interpreting their broader applicability. Larger facilities, denser anchor deployments, or concurrent multi-tag activity may introduce additional complexity in event handling, zone definition, and latency stability. From a sectoral standpoint, the observed performance characteristics satisfy the operational requirements commonly found in assembly-oriented, high-mix, and intralogistics environments. Specifically, the mean trigger-to-action latency of 2.7 s and the 100% correct trigger rate across all trials meet the responsiveness and reliability thresholds necessary to avoid line stoppages and maintain takt adherence, while the demonstrated fault recovery without manual intervention supports the continuous availability required in high-mix production contexts. In such contexts, replenishment reliability and short response times are critical for avoiding line stoppages, maintaining takt adherence, and limiting work-in-progress buffers. The demonstrated combination of continuous spatial visibility, event-driven signaling, and backend automation therefore represents a meaningful departure from traditional scan-based eKanban implementations, which provide only discrete updates and depend on disciplined operator interaction. Moreover, the demonstrated interoperability between standardized middleware, UWB hardware, and a third-party replenishment platform illustrates a viable pathway for decoupling material-flow automation from proprietary vendor ecosystems, an ongoing challenge in Logistics 4.0 and digital lean adoption [11,15,16,17].
Despite this alignment with sector needs, practical deployment is shaped by a number of barriers that extend beyond positioning accuracy. Technical barriers include the need for UWB infrastructure installation, RF site surveying in metal-dense environments, integration with legacy MES/ERP interfaces, and middleware configuration for debounce control, buffering, and API load management. Organizational barriers are equally relevant: workforce acceptance of tracking technologies, IT/OT security governance, and change-management constraints can significantly influence adoption timelines. These socio-technical barriers are consistent with findings in Industry 4.0 and digital transformation studies, which emphasize interoperability constraints, legacy system integration challenges, and fragmented vendor ecosystems as primary inhibitors to scalable deployment [15,31,32,33,46]. Recognizing these constraints is essential for interpreting the transferability of the present results from controlled environments to real industrial settings. From an industrial deployment perspective, the scalability of UWB-based replenishment automation depends on anchor density, multipath characteristics, and concurrent tag traffic. Large facilities with metal racks, AGVs, and dynamic human activity can create non-line-of-sight conditions that degrade range quality and increase geofence jitter. Techniques such as Kalman filtering, TDoA-based synchronization, or sensor fusion with inertial data could mitigate such effects and support higher tag densities [50]. In such settings, middleware-driven event throttling and debounce logic become increasingly important to avoid burst-driven API overload during simultaneous zone crossings. The demonstrated interoperability between UWB hardware, DeepHub’s Omlox-compliant middleware, and a third-party eKanban system also highlights a significant practical benefit: integration effort scales with APIs rather than with vendor-specific hardware ecosystems. This stands in contrast to traditional RTLS deployments, which require vertically integrated stacks and proprietary middleware, thereby obstructing cross-system adoption. As manufacturing facilities move toward hybrid RTLS infrastructures combining UWB, BLE, and RFID, such standardized middleware becomes essential to preserve vendor independence and reduce the total cost of ownership.
Overall, the findings position the proposed middleware as a credible mechanism for enabling spatially triggered replenishment within lean material-flow systems. They also highlight the value of standardized locating frameworks such as Omlox and of middleware platforms like DeepHub, in reducing integration effort and supporting cross-vendor interoperability, reflecting broader cyber–physical systems trends toward interoperable, service-oriented middleware in manufacturing [44,45]. It should be noted, however, that Omlox remains an emerging standard whose ecosystem is still maturing; during the course of this study, DeepHub advanced from version 2.3 to version 2.5.4, introducing API changes that required configuration updates. While this confirms the standard’s active development trajectory, it also represents a practical barrier for long-term reproducibility and large-scale industrial adoption, and should be considered when transferring the proposed architecture to production environments. The implications of these results, as well as opportunities for extending the approach in future deployments, are summarized below.
6. Conclusions and Future Work
This study examined the feasibility of automating Kanban replenishment through a standardized RTLS infrastructure that substitutes operator-driven scans with geofence-based triggers derived from UWB positioning. Through the combination of UWB anchors, DeepHub’s Omlox-compliant location middleware, and Neoception’s eKanban platform, a fully automated signaling loop was established, enabling continuous spatial information to be converted into actionable replenishment events.
Experimental evaluations demonstrated 100% detection success across 140 geofence exit events, no duplicate order creation, and a mean trigger-to-action latency of 2.7 s, with full recovery from induced authentication and connectivity failures. In sectoral terms, these characteristics are highly relevant to lean, high-mix production and intralogistics environments, where timely and reliable replenishment is essential to stabilize pull systems, avoid line stoppages, and limit work-in-progress. The results, therefore, provide empirical evidence that standardized RTLS middleware can support responsive and operator-independent replenishment workflows, moving eKanban from a scan-based tool toward a continuously aware, event-driven mechanism that better aligns with the goals of Industry 4.0 and digital lean transformation.
The findings have practical implications for factories seeking to integrate RTLS into material-handling processes without adopting vertically integrated proprietary solutions. An Omlox-based architecture reduces dependence on specific hardware vendors and supports incremental extension to additional tags, zones, and locating technologies, which is particularly important in sectors characterized by frequent product changes and heterogeneous equipment. At the same time, the interrelationship between detection reliability, low latency, and automatic recovery observed in this study underscores that successful deployment depends not only on positioning performance but also on robust middleware design and its integration with eKanban and ERP backends.
Despite these benefits, several barriers to adoption remain. Deploying RTLS at scale, such as UBW installations, requires upfront investment in anchors, network infrastructure, and commissioning effort, along with in-house or partner expertise in RTLS design and maintenance. Integration with existing MES and ERP systems may also be constrained by legacy interfaces, limited API support, or organizational resistance to modifying established replenishment procedures. Additionally, concerns related to data governance, IT/OT security, and workforce acceptance of asset tracking solutions can slow implementation, especially in highly regulated or unionized environments. Addressing these technical and organizational barriers will be essential for realizing the full potential of interoperable, RTLS-enabled Kanban automation in real-world industrial settings.
The present evaluation focused on a single-tag scenario in a controlled environment, simplifying the spatial layout and interaction patterns. Larger-scale deployments involving multiple moving assets, complex aisle geometries, and hybrid sensors may introduce additional challenges related to interference, geofence design, and REST backend throughput. Addressing these challenges constitutes a relevant direction for future research.
Future work should therefore investigate multi-tag scalability, deployments in dynamic industrial layouts, and hybrid RTLS schemes that combine UWB with BLE, RFID, or inertial sensing. Integration with predictive digital twins and machine-learning-based demand forecasting represents another promising direction, as RTLS-enabled Kanban could evolve from a reactive signaling mechanism into a proactive planning component within cyber–physical production systems. Collectively, these extensions could broaden the applicability and industrial value of Omlox-based localization middleware within next-generation manufacturing environments.
Appendix A. Hardware Configuration and Calibration Details
Appendix A.1. DW1000 Calibration Procedure
Calibration followed the antenna delay compensation procedure recommended for the Decawave DW1000 chipset. Anchor–tag and anchor–anchor pairs were placed at known distances (approximately 1.5 m) and two-way ranging messages were exchanged repeatedly to estimate antenna delay offsets. This process reduced ranging bias from approximately 40 cm to less than 5 cm, providing a stable foundation for trilateration-based position estimation.
Appendix A.2. Anchor Configuration Parameters
Anchors operated at a data rate of 110 kbps with a 16 MHz pulse repetition frequency, channel 5 and a preamble length of 2048 symbols. These settings were selected to prioritize robustness in reflective indoor environments. Continuous drift correction was achieved via reciprocal ranging between anchors.
Appendix B. Communication Protocol Details
Appendix B.1. MQTT and WebSocket Communication
Range measurements collected by the DW1000 firmware were published to the middleware via MQTT using JSON-formatted payloads. The middleware forwarded filtered position estimates to DeepHub using Omlox-compliant WebSocket location updates. WebSocket clients monitored connection states and automatically reconnected following remote resets or network interruptions.
Appendix B.2. REST API Integration and Token Refresh
Replenishment orders were created using authenticated HTTP POST requests to the eKanban Lite REST API. Authentication employed bearer tokens with limited validity. The middleware implemented periodic token refresh triggered by either HTTP 401 responses or internal expiration timers. The system resumed normal operation automatically following successful refresh events.
Appendix C. Movement Protocol
During each trial, the mobile tag was carried through a predefined sequence of virtual zones at walking speed. Each transition across a geofence boundary generated a corresponding spatial event in DeepHub. The movement sequence produced both intermediate crossings for tracking validation and final zone exits for replenishment triggering. This procedure yielded 140 geofence exit events across three runs (one functional and two robustness trials).
Statement of the Use of Generative AI and AI-Assisted Technologies in the Writing Process
During the preparation of this manuscript, the author(s) used Grammarly in order to improve grammar, English expression, and overall readability. After using this tool/service, the author(s) reviewed and edited the content as needed and take(s) full responsibility for the content of the published article.
Author Contributions
Conceptualization, T.C. and V.F.; Methodology, T.C. and V.F.; Software, T.C.; Validation, T.C., V.F., L.G., G.R. and V.A.; Formal Analysis, T.C. and V.F.; Investigation, T.C. and V.F.; Resources, T.C. and V.F.; Data Curation, T.C. and V.F.; Writing—Original Draft Preparation, T.C. and V.F.; Writing—Review & Editing, T.C., V.F., L.G., G.R. and V.A.; Visualization, T.C. and V.F.; Supervision, T.C. and V.F.; Project Administration, T.C. and V.F.; Funding Acquisition, T.C. and V.F.
Ethics Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are not publicly available due to privacy but are available from the corresponding author upon reasonable request.
Funding
The study was developed under the project A–MoVeR—“Mobilizing Agenda for the Development of Products & Systems towards an Intelligent and Green Mobility”, Operation No. 02/C05–i01.01/2022.PC646908627–00000069, approved under the terms of the call No. 02/C05–i01/2022–Mobilizing Agendas for Business Innovation, financed by European Funds provided to Portugal by the Recovery and Resilience Plan (RRP), in the Scope of the European Recovery and Resilience Facility (RRF), framed in the Next Generation UE, for the period from 2021–2026.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
-
Moeuf A, Pellerin R, Lamouri S, Tamayo-Giraldo S, Barbaray R. The industrial management of SMEs in the era of Industry 4.0. Int. J. Prod. Res. 2018, 56, 1118–1136. DOI:10.1080/00207543.2017.1372647 [Google Scholar]
-
Lasi H, Fettke P, Kemper HG, Feld T, Hoffmann M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242. DOI:10.1007/s12599-014-0334-4 [Google Scholar]
-
Winkelhaus S, Grosse EH. Logistics 4.0: A systematic review towards a new logistics system. Int. J. Prod. Res. 2020, 58, 18–43. DOI:10.1080/00207543.2019.1612964 [Google Scholar]
-
Chung SH. Applications of smart technologies in logistics and transport: A review. Transp. Res. Part E 2021, 153, 102455. DOI:10.1016/j.tre.2021.102455 [Google Scholar]
-
Sugimori Y, Kusunoki K, Cho F, Uchikawa S. Toyota production system and Kanban system: Materialization of just-in-time and respect-for-human system. Int. J. Prod. Res. 1977, 15, 553–564. DOI:10.1080/00207547708943149 [Google Scholar]
-
Kimura O, Terada H. Design and analysis of pull system, a method of multi-stage production control. Int. J. Prod. Res. 1981, 19, 241–253. DOI:10.1080/00207548108956651 [Google Scholar]
-
Buer SV, Strandhagen JO, Chan FTS. The link between Industry 4.0 and lean manufacturing: Mapping current research and establishing a research agenda. Int. J. Prod. Res. 2018, 56, 2924–2940. DOI:10.1080/00207543.2018.1442945 [Google Scholar]
-
Sanders A, Elangeswaran C, Wulfsberg J. Industry 4.0 implies lean manufacturing: Research activities in Industry 4.0 function as enablers for lean manufacturing. J. Ind. Eng. Manag. 2016, 9, 811–833. DOI:10.3926/jiem.1940 [Google Scholar]
-
Mayilsamy T, Pawan KE. Implementation of E-Kanban system design in inventory management. Int. J. Sci. Res. Publ. 2014, 4, 1–4. Available online: https://www.ijsrp. org/research-paper-0914/ijsrp-p3352.pdf (accessed on 16 December 2025) [Google Scholar]
-
Shima K, Yamaguchi M, Yoshida T, Otsuka T. Status estimation and in-process connection of kanbans using BLE beacons and LPWA network to implement intra-traceability for the kanban system. Sensors 2021, 21, 5038. DOI:10.3390/s21155038 [Google Scholar]
-
Sony M. Industry 4.0 and lean management: A proposed integration model and research propositions. Prod. Manuf. Res. 2018, 6, 416–432. DOI:10.1080/21693277.2018.1540949 [Google Scholar]
-
Ikeziri LM, Melo JC, Campos RT, Okimura LI, Gobbo Junior JA. A perspectiva da indústria 4.0 sobre a filosofia de gestão Lean Manufacturing. Braz. J. Dev. 2020, 6, 1274–1289. DOI:10.34117/bjdv6n1-089 [Google Scholar]
-
Frank AG, Dalenogare LS, Ayala NF. Industry 4.0 technologies: Implementation patterns in manufacturing companies. Int. J. Prod. Econ. 2019, 210, 15–26. DOI:10.1016/j.ijpe.2019.01.004 [Google Scholar]
-
Sah BP, Tanha NI, Sikder MA, Habibullah SM. The integration of Industry 4.0 and lean technologies in manufacturing industries: A systematic literature review. Int. J. Manag. Inf. Syst. Data Sci. 2024, 1, 14–25. DOI:10.62304/ijmisds.v1i3.164 [Google Scholar]
-
Hossain MM, Purdy G. Integration of Industry 4.0 into lean production systems: A systematic literature review. Manuf. Lett. 2023, 35, 1347–1357. DOI:10.1016/j.mfglet.2023.08.098 [Google Scholar]
-
Efthymiou OK, Ponis ST. Current status of Industry 4.0 in material handling automation and in-house logistics. Int. J. Ind. Manuf. Eng. 2019, 13, 1370–1374. Available online: https://www.academia.edu/download/94869636/10010833.pdf (accessed on 16 December 2025).
-
Gallo T, Cagnetti C, Silvestri C, Ruggieri A. Industry 4.0 tools in lean production: A systematic literature review. Procedia Comput. Sci. 2021, 180, 394–403. DOI:10.1016/j.procs.2021.01.255 [Google Scholar]
-
Volpi A, Tebaldi L, Matrella G, Montanari R, Bottani E. Low-cost UWB based real-time locating system: Development, lab test, industrial implementation and economic assessment. Sensors 2023, 23, 1124. DOI:10.3390/s23031124 [Google Scholar]
-
Ziegler M, Kianfar AE, Hartmann T, Clausen E. Development and evaluation of a UWB-based indoor positioning system for underground mine environments. Min. Metall. Explor. 2023, 40, 1021–1040. DOI:10.1007/s42461-023-00797-z [Google Scholar]
-
ISO/IEC 18000; Information Technology—Radio Frequency Identification for Item Management. Available online: https://www.iso.org/standard/46149.html (accessed on 15 December 2025).
-
Zebra RTLS Solutions Overview. Available online: https://www.zebra.com/us/en/products/location-technologies.html. (accessed on 15 December 2025).
-
Zafari F, Gkelias A, Leung KK. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. DOI:10.1109/COMST.2019.2911558 [Google Scholar]
-
Alarifi A, Al-Salman A, Alsaleh M, Alnafessah A, Al-Hadhrami S, Al-Ammar M, et al. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. DOI:10.3390/s16050707 [Google Scholar]
-
Aziz T, Koo I. A comprehensive review of indoor localization techniques and applications in various sectors. Appl. Sci. 2025, 15, 1544. DOI:10.3390/app15031544 [Google Scholar]
-
Xiao J, Zhou Z, Yi Y, Ni LM. A survey on wireless indoor localization from the device perspective. ACM Comput. Surv. 2016, 49, 1–31. DOI:10.1145/2933232 [Google Scholar]
-
Shi T, Gong W. A survey of Bluetooth indoor localization. arXiv 2024, arXiv:2404.12529. DOI:10.1109/BigDataSecurity62737.2024.00020 [Google Scholar]
-
Hodge V, Hawkins R, Hilder J, Habli I. Analysing ultra-wide band positioning for geofencing in a safety assurance context. arXiv 2022, arXiv:2203.05830. DOI:10.48550/arXiv.2203.05830 [Google Scholar]
-
IEEE Std 802.15.4-2020; IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems—LOCAL and Metropolitan Area Networks—Specific Requirements—Part 15.4: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Networks. IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
-
Leitch S, Ahmed Q, Abbas W, Hafeez M, Lazaridis P, Sureephong P, et al. On indoor localization using Wi-Fi, BLE, UWB, and IMU sensor fusion: Techniques and challenges. Sensors 2023, 23, 8598. DOI:10.3390/s23208598 [Google Scholar]
-
Groves PD. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
-
Marx E, Daudrich R, Pauli T, Matzner M, Beverungen D. Standardization as a catalyst for extending resources and capabilities in service systems engineering: Findings from the omlox case. J. Serv. Manag. Res. 2023, 7, 213–231. DOI:10.5771/2511-8676-2023-4-213 [Google Scholar]
-
Lu Y. Industry 4.0: A survey on technologies, applications and open research issues. J. Ind. Inf. Integr. 2017, 6, 1–10. DOI:10.1016/j.jii.2017.04.005 [Google Scholar]
-
Rebelo PM, Lima J, Soares SP, Moura Oliveira P, Sobreira H, Costa P. A performance comparison between different industrial real-time indoor localization systems for mobile platforms. Sensors 2024, 24, 2095. DOI:10.3390/s24072095 [Google Scholar]
-
omlox—The World’s First Open Localization Standard. Available online: https://www.profibus.com/technology/omlox/ (accessed on 15 December 2025).
-
Locating Technologies Reimagined—Introducing Omlox the Open Locating Standard. Available online: https://omlox.com/fileadmin/user\_upload/20241017\Locating\_Technologies\_reimagined.pdf (accessed on 15 December 2025).
-
Omlox: The Open Standard for Seamless Location in the Industrial Sector. Available online: https://www.profibus.com/newsroom/press-news/omlox-the-open-standard-for-seamless-location-in-the-industrial (accessed on 15 December 2025).
-
DeepHub Documentation Overview. Available online: https://docs.deephub.io/docs-overview/ (accessed on 16 December 2025).
-
eKanban Lite–Smart Inventory Monitoring. Available online: https://www.neoception.com/smart-inventory-monitoring-platform/neoception-ekanban-lite/ (accessed on 16 December 2025).
-
Zhao W, Goudar A, Tang M, Schoellig AP. Ultra-wideband time difference of arrival indoor localization: From sensor placement to system evaluation. arXiv 2024, arXiv:2412.12427. DOI:10.48550/arXiv.2412.12427 [Google Scholar]
-
Tiemann J, Wietfeld C. Scalable and precise multi-UAV indoor navigation using UWB localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–6. [Google Scholar]
-
Dardari D, Conti A, Ferner U, Giorgetti A, Win MZ. Ranging with ultrawide bandwidth signals in multipath environments. Proc. IEEE 2009, 97, 404–426. DOI:10.1109/JPROC.2008.2008846 [Google Scholar]
-
IEEE 802.11-2020—Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. Available online: https://ieeexplore.ieee.org/document/9363693 (accessed on 16 December 2025).
-
Kritzinger W, Karner M, Traar G, Henjes J, Sihn W. Digital twin in manufacturing: A categorical literature review and classification. IFAC-PapersOnLine 2018, 51, 1016–1022. DOI:10.1016/j.ifacol.2018.08.474 [Google Scholar]
-
Lee J, Bagheri B, Kao HA. A cyber-physical systems architecture for Industry 4.0-based manufacturing systems. Manuf. Lett. 2015, 3, 18–23. DOI:10.1016/j.mfglet.2014.12.001 [Google Scholar]
-
Monostori L. Cyber-physical production systems: Roots, expectations and R&D challenges. Procedia CIRP 2014, 17, 9–13. DOI:10.1016/j.procir.2014.03.115 [Google Scholar]
-
Givehchi O, Landsdorf K, Simoens P, Colombo AW. Interoperability for industrial cyber-physical systems: An approach for legacy systems. IEEE Trans. Ind. Inform. 2017, 13, 3370–3378. DOI:10.1109/TII.2017.2740434 [Google Scholar]
-
Le TV, Fan R. Digital twins for logistics and supply chain systems: Literature review, conceptual framework, research potential, and practical challenges. Comput. Ind. Eng. 2024, 187, 109768. DOI:10.1016/j.cie.2023.109768 [Google Scholar]
-
Barricelli BR, Casiraghi E, Fogli D. A survey on digital twin: Definitions, characteristics, and classification. IEEE Access 2019, 7, 167653–167671. DOI:10.1109/ACCESS.2019.2953499 [Google Scholar]
-
Wan J, Tang S, Shu Z, Li D, Wang S, Imran M, et al. Software-defined industrial internet of things in the context of Industry 4.0. IEEE Sens. J. 2016, 16, 7373–7380. DOI:10.1109/JSEN.2016.2565621 [Google Scholar]
-
Kolakowski M. Kalman filter based localization in hybrid BLE-UWB positioning system. In Proceedings of the 2017 IEEE International Conference on RFID Technology & Application (RFID-TA), Warsaw, Poland, 20–22 September 2017. DOI:10.1109/RFID-TA.2017.8098889 [Google Scholar]