Found 369 results
Open Access
Review
03 February 2026Review of Offshore Wind Power Grid Integration and Operation in New Energy Systems
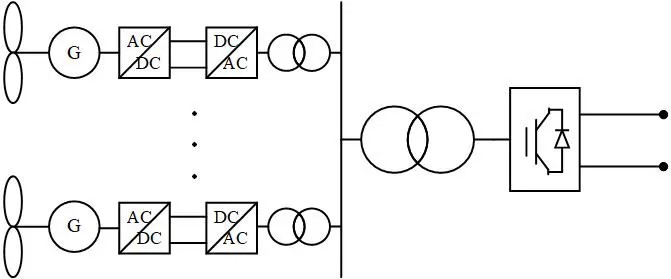
Offshore wind power is a key resource for achieving low-carbon transition in power systems with high penetration of renewable energy and power electronics, and it plays an increasingly important role in the development of modern power systems worldwide. The current research work focuses on aggregation-based development and operation technologies, grid-connected operation methods, and optimal scheduling strategies for offshore wind power, aiming to achieve the stable and healthy development of the offshore wind power industry. This paper reviews the characteristics of offshore wind energy systems and the integrated utilization technology for grid-connected operation. First, the aggregation features and system characteristics of new energy systems with large-scale offshore wind power are examined. Then, the system reviews key technologies for large-scale offshore wind power grid integration based on VSC-HVDC technology and analyzes the source-load characteristics of new energy systems incorporating offshore wind power. Finally, the development trends of offshore wind energy systems and integrated utilization technologies for grid-connected operation, as well as the technical fields that require further research in the future, are prospectively discussed.
Open Access
Article
02 February 2026Transcriptomic Insights into Selenite Response and Biotransformation in a Novel Selenium-Enriching Lactic Acid Bacterium
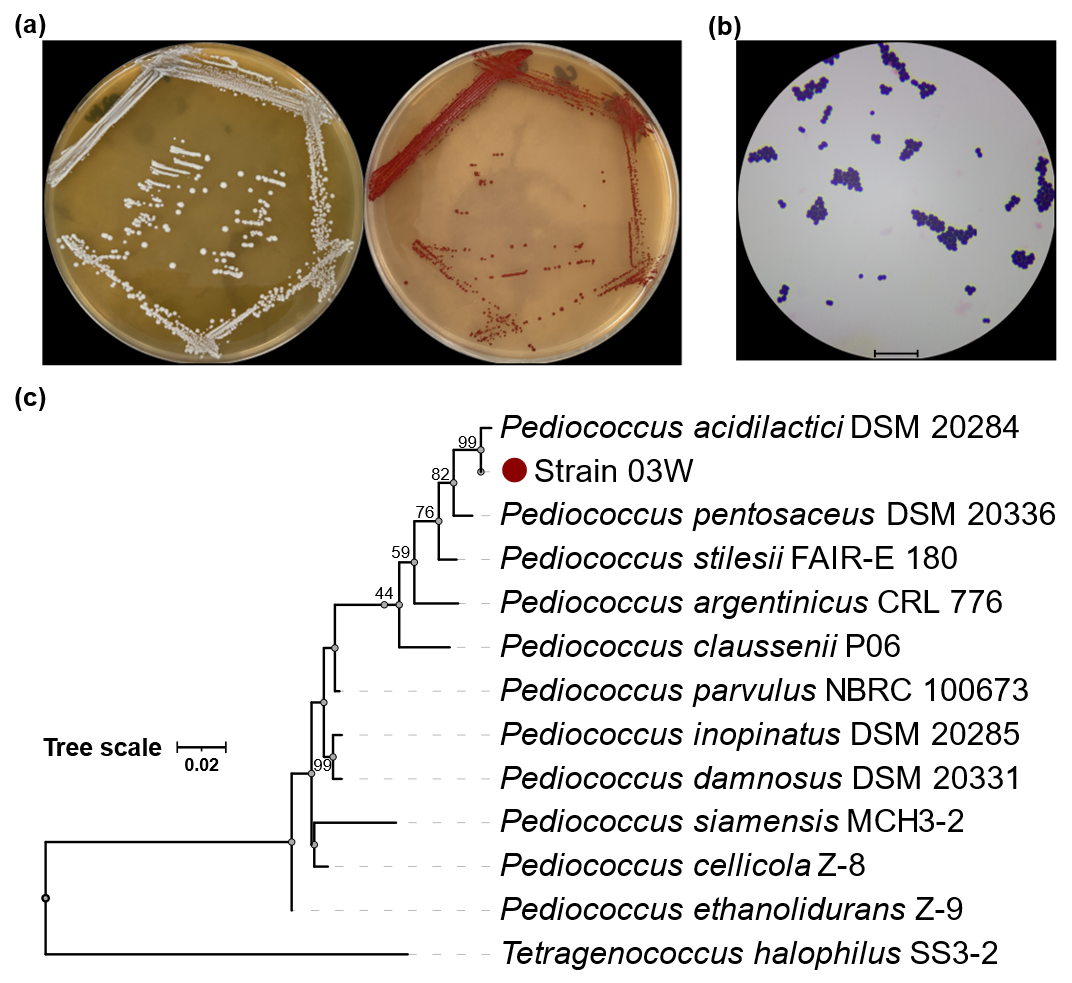
Many microorganisms are capable of surviving selenium (Se)-rich environments and efficiently transforming inorganic Se into organic Se, enabling them to act as a potent biocatalyst for the synthesis of organic Se. Here, we isolated a novel selenium-enriching lactic acid bacterium, Pediococcus acidilactici 03W, from the selenium-rich soil. The growth experiment showed that glucose is the optimal carbon source for P. acidilactici 03W when grown in 1000 µg·mL−1 sodium selenite at pH 6. RNA-seq analysis revealed that a total of 761 genes exhibited altered expression in response to selenite exposure. Downregulation of the phosphate transporter operon (pstA/B/C) and TauE/SafE-type exporters signaled a flux-throttling program that curtailed transmembrane anion flow—limiting high-affinity phosphate uptake and modulating sulfur/selenite export—thereby aligning net anion influx with the cell’s available reductive capacity. In contrast, the expression of the key genes responsible for NAD(P)H or FMN-dependent oxidoreductases and thiol-based redox systems (e.g., trxA/B, tpx, gor, and garB) was induced, together with cysteine desulfurases and sulfurtransferases, supporting the enzymatic reduction of selenite. Interestingly, Fe–S cluster assembly genes (e.g., sufU) were suppressed (not induced), suggesting a shift away from de novo Fe–S biogenesis toward sulfur–selenium transfer and detoxification under oxidative stress. Also, some key genes involved in central carbon metabolism, including the glycolytic pathway (e.g., pfkA) and the pentose phosphate pathway (PPP) (e.g., zwf), were downregulated, which is consistent with reallocating resources from rapid growth to redox homeostasis. Collectively, selenium assimilation in P. acidilactici 03W proceeds through anion transport, enzymatic reduction to Se0 or H2Se, and incorporation into seleno-amino acids (selenocysteine and selenomethionine). Our findings provide a basis for microbial selenium transformation and highlight the potential of P. acidilactici 03W for developing selenium-enriched probiotic foods.
Open Access
Article
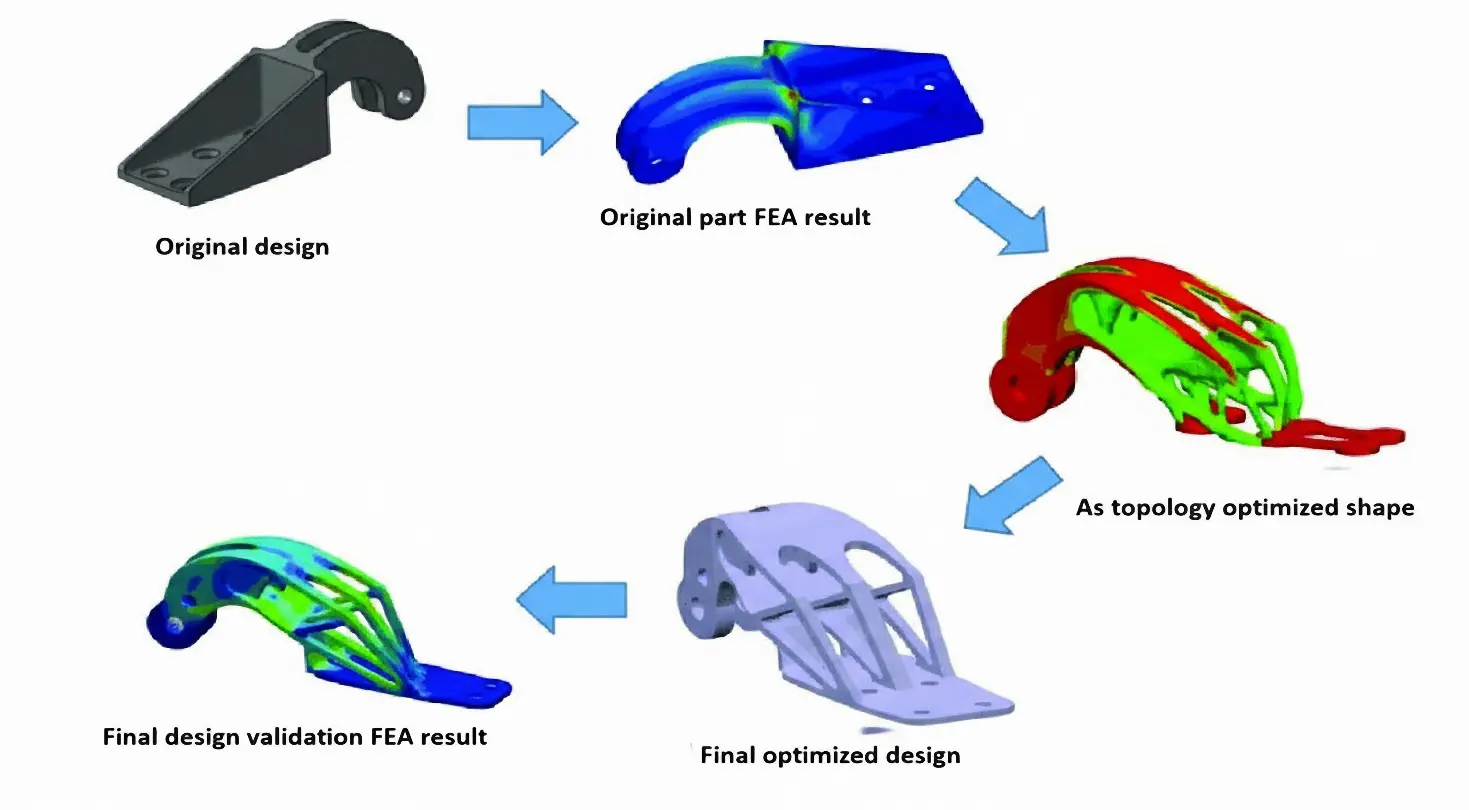
02 February 2026Topology Optimization for Drone Structure: Comprehensive Workflow Including Conceptual Modeling, Components Preparation and Additive Manufacturing
Payload drones are often limited more by frame weight than by motor power. This work aims to design, optimize, and validate a flat octocopter frame with eight independently driven rotors arranged symmetrically on separate arms. The drone frame design in SOLIDWORKS uses Finite Element Analysis (FEA) and topology optimization to remove material from low-stress regions while keeping the main load paths intact. The final design cuts the frame mass by 37.3% compared to the baseline model and reduces the 3D printing time by about five hours using a Creality K1C printer with Polylactic Acid (PLA) filament. These changes increase the available thrust-to-weight margin for payload without exceeding the allowable stress or deformation limits of the material. The electronic components also identified compatible flight controllers, ESCs, motors, and radio systems to show that the proposed frame can be integrated into a complete multirotor platform. Overall, this work demonstrates a practical approach to designing lighter octocopter frames that are easier to 3D print and can be used more effectively for delivery and inspection missions.
Open Access
Article
28 January 2026Enhanced High-Temperature Oxidation Resistance of Refractory High-Entropy Alloys Al-Cr-Mo-Ta-Ti by Aluminizing Using Pack Cementation
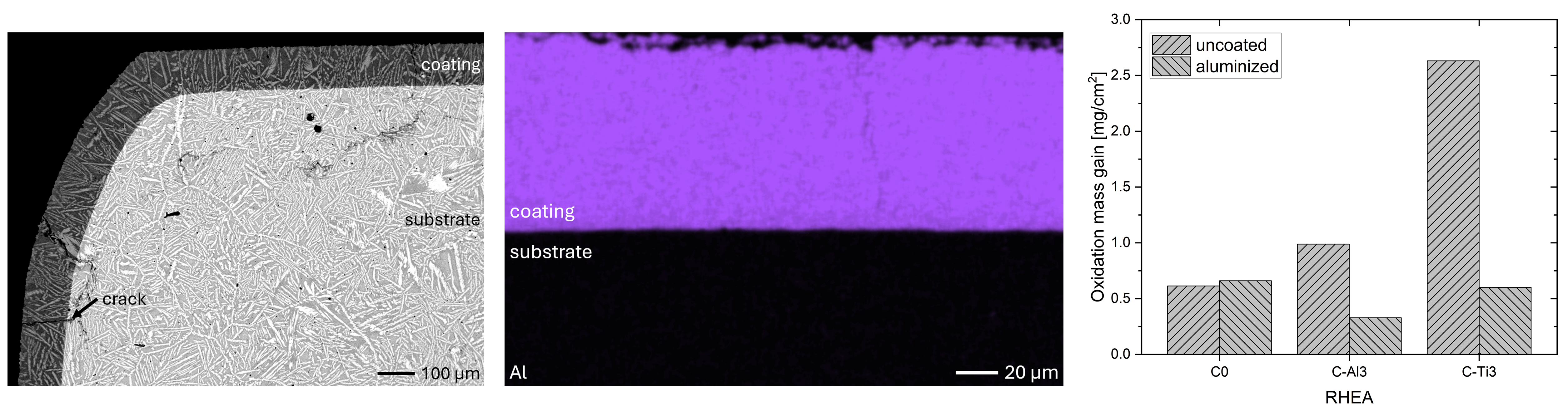
Refractory high-entropy alloys (RHEAs) show promising properties for applications as structural materials in high-temperature applications, such as high solidus temperature and high strength. Improving their density, oxidation resistance, and room temperature ductility are still the aims of research in alloy development. In this study, Al-rich diffusion coatings by pack cementation are developed for three different alloys in the system Al-Cr-Mo-Ta-Ti in order to improve their high-temperature oxidation resistance. Equimolar AlCrMoTaTi, Al-rich Al3CrMoTaTi, and Ti-rich AlCrMoTaTi3 are synthesized by vacuum arc melting with subsequent milling to powder, consolidation to bulk material by field-assisted sintering technology/spark plasma sintering (FAST/SPS), and homogenization heat treatment. The applied aluminizing coatings are investigated by gravimetry, scanning electron microscopy (SEM), energy-dispersive X-ray spectroscopy (EDS), and X-ray diffraction (XRD). Experimental analyses are supplemented by CALPHAD simulations. Compact, uniform, and adhesive Al-rich diffusion coatings are produced on all three substrate RHEAs and exhibit single-layered D022 Al3(Cr,Mo,Ta,Ti) intermetallic compound analogous to Al3Ti in the binary Al-Ti system. Isothermal oxidation at 1000 °C for 48 h in ambient air results in the formation of 1–2 µm thin protective single-layered alumina scale—in contrast to multi-layered oxide scales in uncoated condition—and mass gains as low as binary Al3Ti and Ni-based superalloys.
Open Access
Article
26 January 2026Enhanced Stability of Nickel Phyllosilicate Anchored Ni/SiO2 Catalyst for Liquid-Phase Hydrogenation and Hydrodeoxygenation
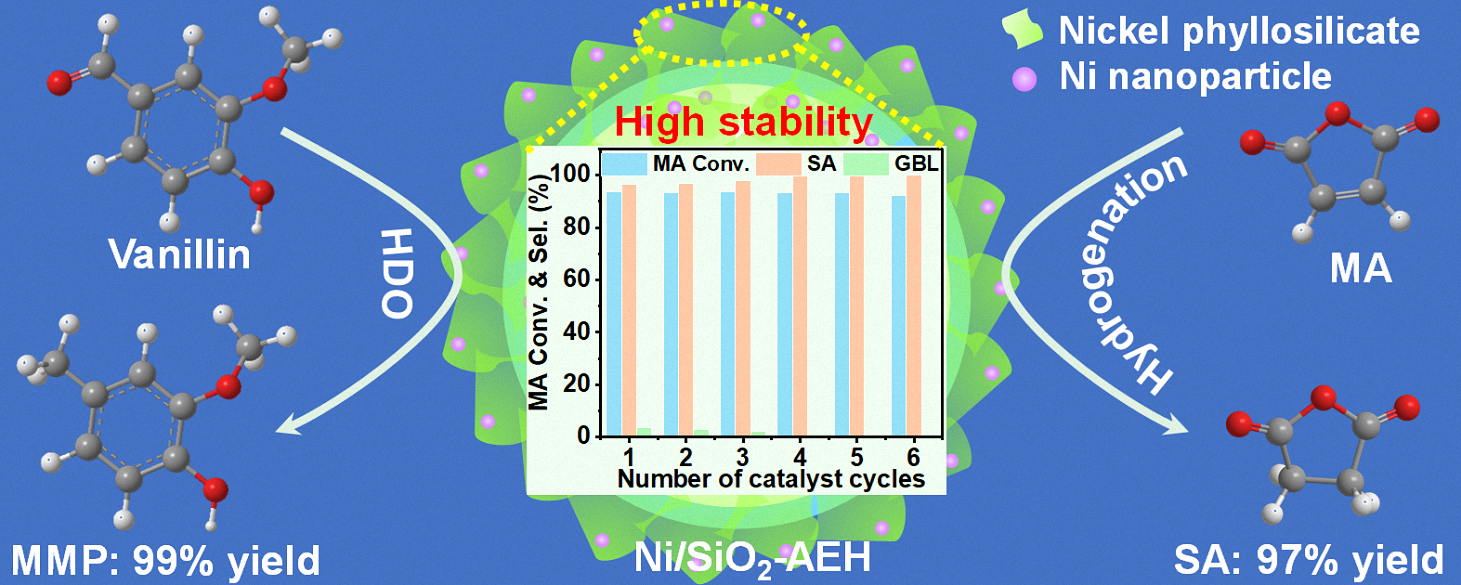
The aggregation and leaching of nanoparticles often reduce catalytic activity and hinder the long-term application of catalysts. Here, we synthesis a hollow Ni/SiO2-AEH catalyst with small Ni nanoparticles (NPs) encapsulated by nickel phyllosilicate (NiPS) via an ammonia evaporation-hydrothermal method. Compared with the Ni/SiO2-AE only synthesized via ammonia evaporation method, the Ni/SiO2-AEH catalyst after further hydrothermal treatment possesses more nickel phyllosilicate (NiPS) species, which enhances the stability of Ni NPs through the strong metal-support bonding (Si–O–Ni) in NiPS. By controlling the size of Ni NPs to 3.6 nm along with the presence of NiPS, we find that Ni/SiO2-AEH displays superior catalytic performance for maleic anhydride (MA) hydrogenation and vanillin hydrodeoxygenation, achieving yields of 97% for succinic anhydride (SA) and 99% for 2-methoxy-4-methylphenol (MMP), respectively. Importantly, the deactivation of Ni/SiO2-AEH is remarkably suppressed, with only a slight decrease in activity after five or six runs. The excellent catalytic activity and stability of phyllosilicate materials imply an extensive application in other industrial catalytic reactions.
Open Access
Review
26 January 2026Data Caring While Caring for Human Remains: Challenges of Legacy Collections
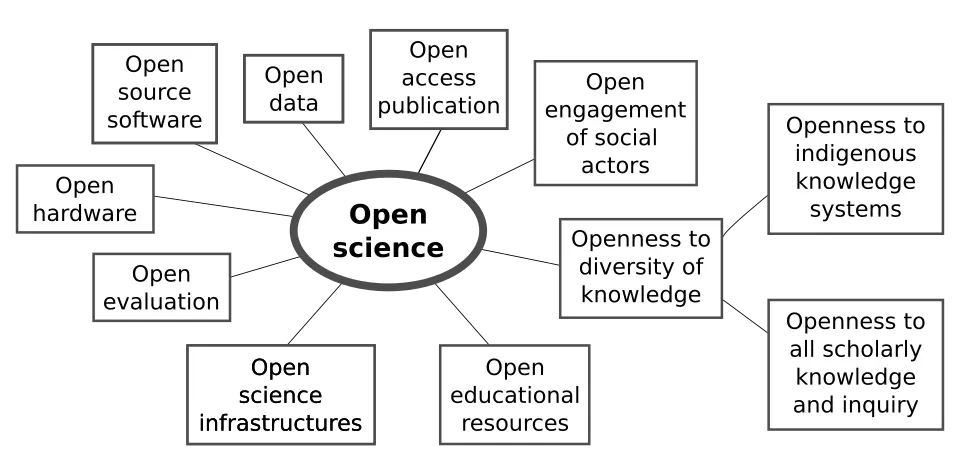
Museum collections are essential for scientific research and are diverse in nature. They include human remains and associated information. Many experience discomfort due to historical legacies and procurement practices that are often not openly discussed, which, in an age that advocates Open Science, need open discussion. Within Open Science, open Data Sharing and the FAIR principles (Findable, Accessible, Interoperable, and Reusable) are key guidelines for research data decisions—emphasizing “as open as possible, as closed as necessary”. This manuscript explores how data management and Open Science practices may impact on human ancestral remains, risking perpetuating practices of human remains objectification, reinforcing historical violence through digital means, if not balanced with restrictive access protocols. There is a growing concern for data care and stewardship amongst museums and allied institutions, and although the argument is based on the fairness of sharing and conscious, ethical sharing, source collection and associated data need to be questioned at its origins. Hence, the emphasis is placed on CARE principles (Collective Benefit, Authority to Control, Responsibility, Ethics) prioritising dignity, sovereignty, relationality, and ethics, moving from data accumulation and universal openness toward context-driven, community-controlled, and ethically reflexive stewardship. This approach advocates restraint, challenging museums, researchers, and funders to reconsider the objectification of ancestors and the ethical responsibilities surrounding their digital and material legacies. Ethical issues no longer relate solely to ancestral remains; they extend to their data and metadata across matters related to governance, circulation, “ownership?”, and repatriation. Alongside FAIR, one must practice CARE, and above all, allow for detachment and critical thinking.
Open Access
Article
26 January 2026Investigating the Interplay of Springshed Phenomenon and Its Crucial Role in Fostering Sustainable Practices and Community Resilience: Reflection from the Indian Himalayan Regions
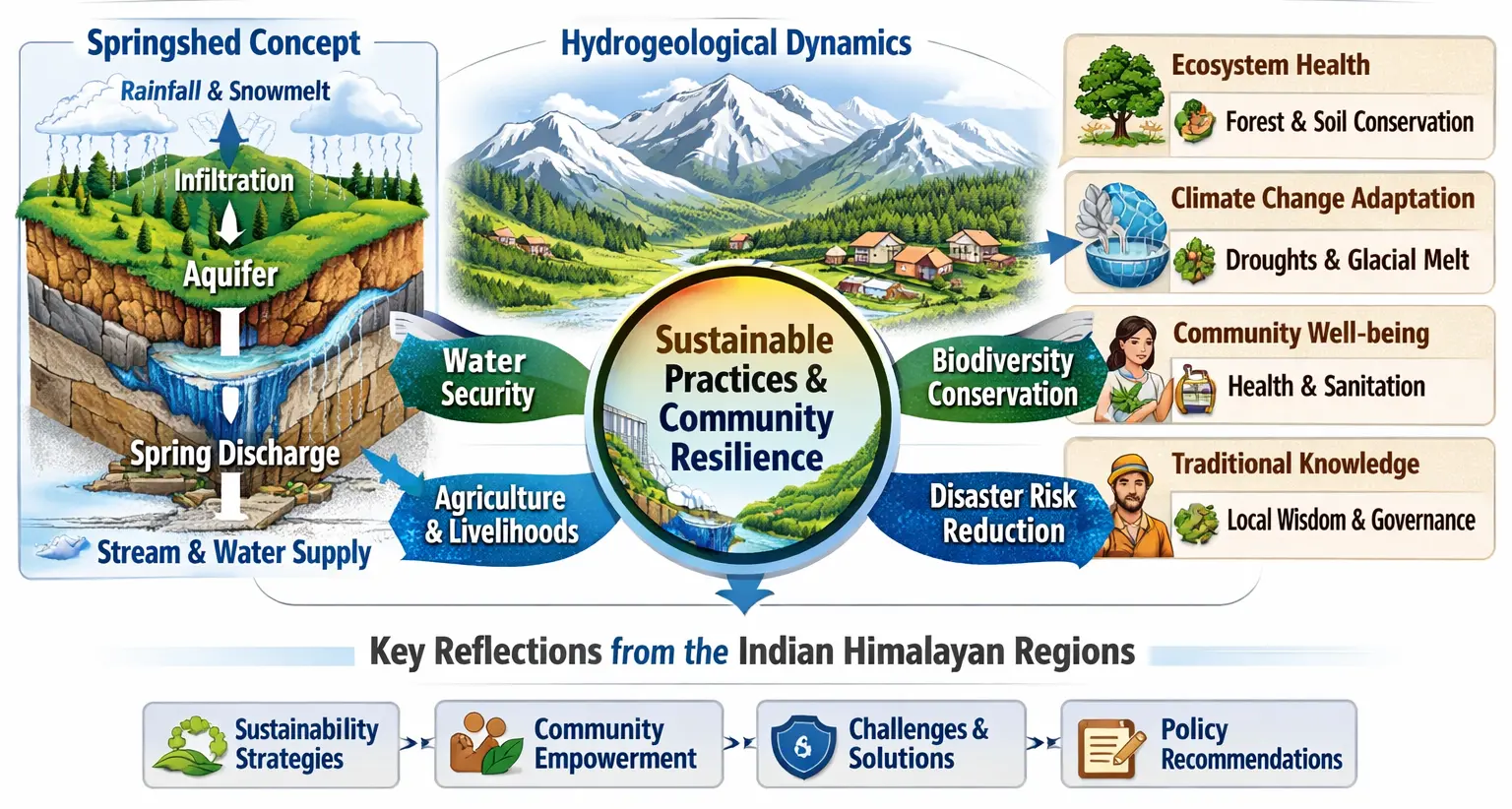
This study examines the critical role of springsheds in fostering resilient communities and sustainable practices in the Indian Himalayan regions, focusing on Kalimpong I (Kalimpong) and Bhurung (Sikkim). The research addresses the pressing environmental challenges, particularly resource depletion and water scarcity, that threaten these ecologically sensitive areas. By integrating physical, environmental, and socio-economic analyses, the study compares the spring water quality, utility, and mobility in the two springsheds. It also identifies obstacles residents face in accessing these water sources. Utilizing mixed methods, including field surveys, in-depth interviews, GIS-based mapping, and water quality analysis, the study reveals the indispensable role of springs in daily life, providing essential water for drinking, agriculture, and domestic use. The findings emphasize the need to integrate traditional knowledge with sustainable practices, such as rainwater harvesting and afforestation, to enhance community resilience. This research highlights the importance of community-driven approaches to environmental sustainability, offering valuable insights for similar ecological settings worldwide.
Open Access
Article
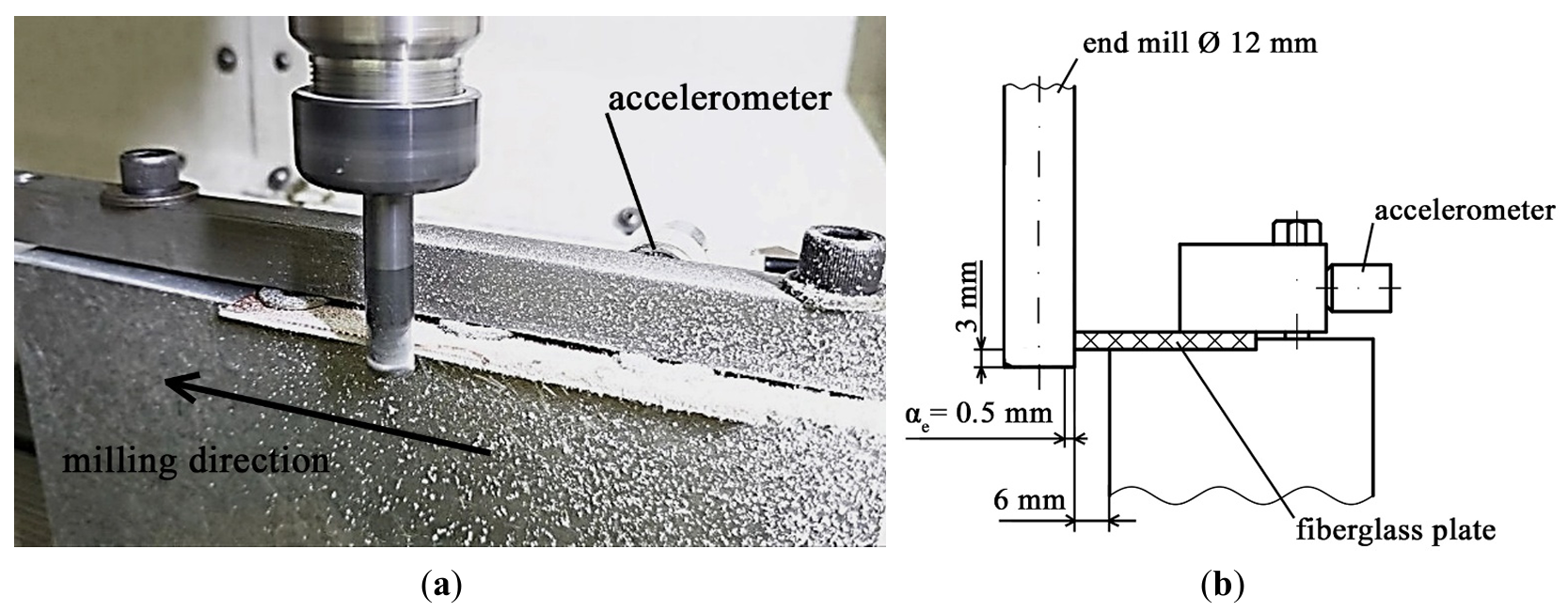
21 January 2026Milling Mechanism of Sheet Fiberglass Plastic by a Tungsten Carbide Tool with Diamond and Diamond-like Wear-Resistant Coatings
The study focuses on identifying the specific mechanisms of the FR4 fiberglass composite milling process using tungsten carbide end mills with wear-resistant diamond-like and diamond coatings. The processing was carried out at cutting speeds from 115 to 300 m/min and feed of 0.075 and 0.15 mm/tooth. At the same time, the vibroacoustic signal was recorded in three formats: changes in the RMS value and the amplitude of the acoustic emission in the low-frequency and high-frequency ranges, as well as the parameter Kf, which is the ratio of the RMS amplitudes of the signals in the low-frequency and high-frequency ranges. It is shown that the coating material has a predominant effect on the surface roughness. The minimum roughness value was RA = 0.2 µm for the case of a diamond-coated tool. In addition, the coating improves processing performance by increasing the cutting speed for tools with DLC by 1.3 times and for tools with diamond coating by 1.7 times, provided that the RA increases slightly but does not exceed 0.36 µm. When processed with an uncoated instrument, the mill captures the fiber, bends it and breaks it into bundles, creating grooves. The mechanism of glass fiber destruction by a DLC mill is similar, with the difference that the length of the fragmented fiber sections is noticeably reduced due to reduced friction. The mechanism of cutting fiberglass with a diamond-coated milling cutter is significantly different. There are characteristic scratches on the worn sections of the fiber, and there are no signs of destruction of the composite between the matrix and the fiber. Studies of vibration signals have shown that frequency ranges up to 20 kHz and from 33 to 48 kHz are informative enough to diagnose the fiberglass milling process. The most significant values of the Kf parameter were observed at large amplitudes of low-frequency vibrations, typical for processing with uncoated and DLC milling cutters. The lowest Kf values were obtained using diamond-coated milling cutters. A correlation was found between the values of the Kf parameter and the roughness values of the treated end surface of the fiberglass plate.
Open Access
Article
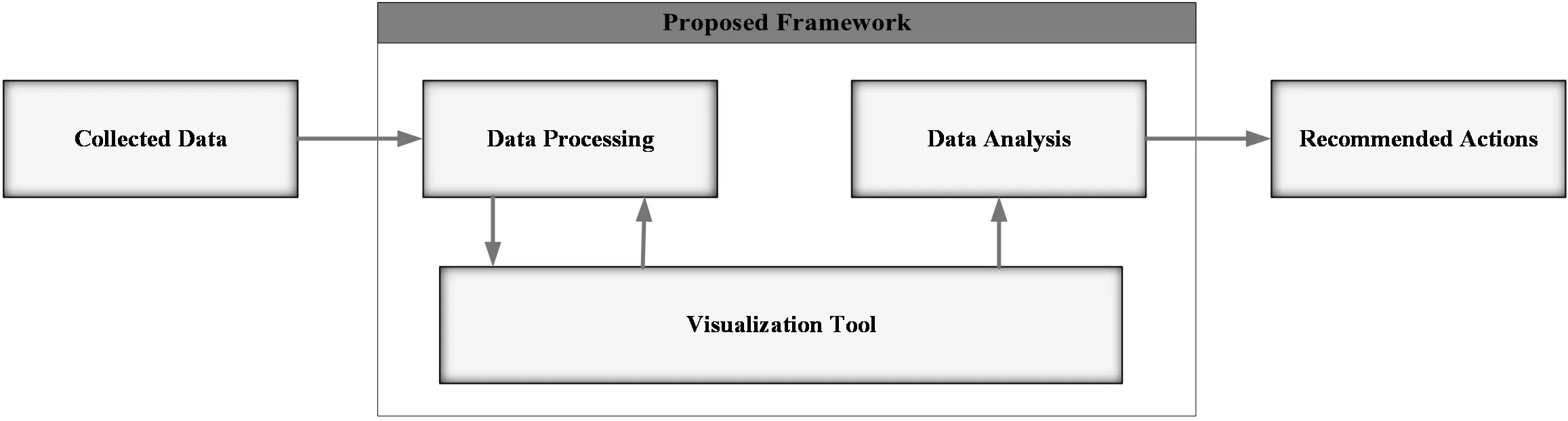
21 January 2026An Industry 4.0-Based Data Visualization Framework for Improved Manufacturing Data Analysis—A Case Study
The proliferation of Industry 4.0 technologies in manufacturing has created an unprecedented opportunity to leverage Big Data for process optimization and efficiency improvements. However, the sheer volume of data can also lead to critical information being overlooked, potentially hindering productivity and competitiveness. This paper presents a straightforward Industry 4.0-based data visualization framework designed to transform raw manufacturing data into actionable insights. Specifically, this work focuses on the analysis of Overall Equipment Effectiveness (OEE) data. The framework utilizes a practical dashboard tool to enable manufacturers to perform in-depth data analysis and identify areas for improvement in real-time. Such a framework enables prompt intervention when corrective actions are needed, ultimately increasing efficiency and reducing production downtime. The framework was successfully implemented at a tire manufacturing company on a single machine within a short period of time. The results highlighted the effectiveness of data visualization in identifying specific operational losses and informing strategic decision-making. This work emphasizes the critical role of technology and proper policies in leveraging data to optimize production processes and drive continuous improvement in Industry 4.0 environments.
Open Access
Article
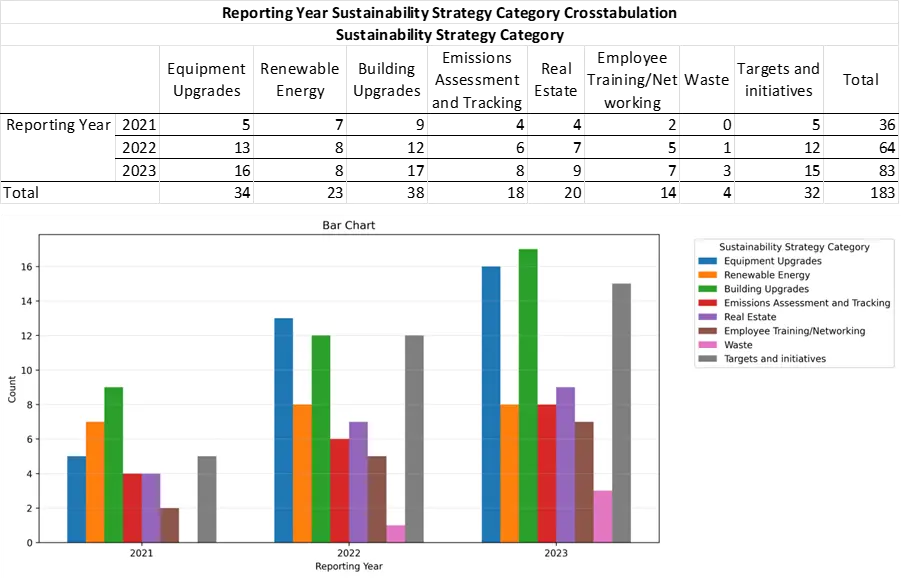
20 January 2026Can Global Contract Research Organisations Contribute to Decarbonisation? The Impact of Environmentally Sustainable Business Practice on Scope 1 and 2 Emissions
Carbon emissions of clinical trials have been one of the contributors to global emissions. However, the clinical research industry, particularly contract research organisations (CROs) engaged in trials, has received little attention in the existing literature regarding their carbon footprint. This research examines the sustainable practices implemented by leading global CROs and how these practices influence scope 1 and 2 CO2 emissions. The findings show that increasing the number of sustainability initiatives is insufficient to achieve a measurable reduction in emissions. At the same time, whilst some sustainable practices, such as building upgrades and real estate improvements, lead to a reduction in scope 1 and 2 emissions, others, such as equipment upgrades, are associated with higher emissions. The study, therefore, uncovers a counterintuitive finding—that renewable energy practices showed a positive correlation with emissions. This may be viewed as a paradox, although it serves as a critical warning against measuring sustainability by the quantity of initiatives, rather than their quality or ultimate effect. By assessing the impact of organisational environmental practices on emissions, the study contributes to knowledge by providing a more nuanced understanding of the effectiveness of environmentally sustainable business strategies adopted by CROs.