Found 26 results
Open Access
Article
28 September 2025Integrated Consensus Framework for Task Assignment and Path Planning of a Degraded UAV Fleet
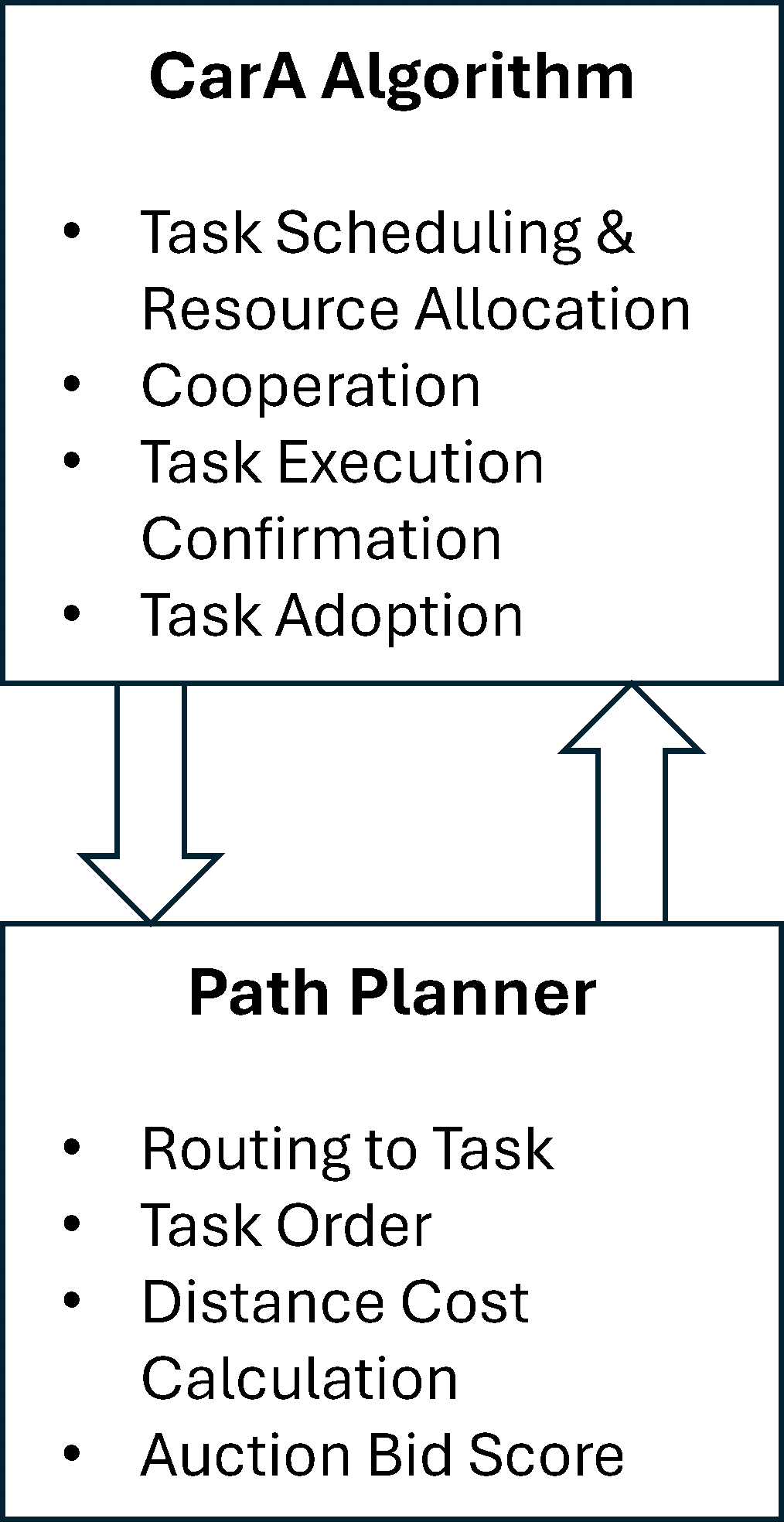
Unmanned aerial vehicle (UAV) systems can fail during civil and military operations. This presents a significant challenge for human teleoperators (remote pilots) in determining task reallocation after member loss within the fleet. To alleviate the high cognitive load on teleoperators in critical situations, a decentralized strategy was developed to resolve the combined task assignment and vehicle routing problems. This Integrated Consensus Framework (ICF) not only solves the combined problem but also adds a unique ability to identify the loss of a vehicle and dynamically reroute agents to abandoned tasks to achieve a satisfactory solution. ICF is a two-tiered approach that combines a novel algorithm, the Caravan Auction (CarA) algorithm, with a path-planning strategy to identify when UAVs are lost and reallocate orphaned tasks. The CarA Algorithm consists of three phases: auction, consensus, and validation phases. An experiment using Monte Carlo simulations was conducted to determine the performance of ICF. Teleoperators assigned to complete multiple tasks with UAVs in dangerous environments can allow the proposed system to perform task assignments and reallocation while offering only supervisory control as needed. The results indicate this novel approach provides comparable performance to existing strategies, doing so with the addition of randomized UAV loss.
Open Access
Article
23 September 2025A Survey on XR-Based Drone Simulation: Technologies, Applications, and Future Directions
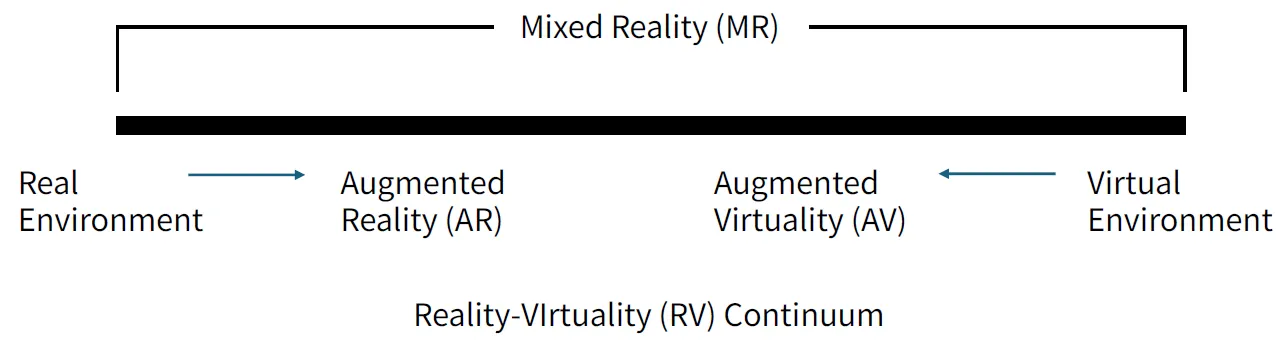
This paper presents a comprehensive survey of Extended Reality (XR)-based drone simulation systems, encompassing their architectures, simulation engines, physics modeling, and diverse training applications. With a particular focus on manual multirotor drone operations, this study highlights how Virtual Reality (VR) and Augmented Reality (AR) are increasingly vital for pilot training and mission rehearsal. We classify these simulators based on their hardware interfaces, spatial computing capabilities, and the integration of game and physics engines. We analyze specific platforms such as Flightmare, AirSim, DroneSim, Inzpire Mixed Reality UAV Simulator, and SimFlight XR are analyzed to illustrate various design strategies, ranging from research-grade modular frameworks to commercial training tools. In this paper, we also examine the implementation of spatial mapping and weather modeling to enhance realism in AR-based simulators. Finally, we identify critical challengesthat remain to be addressed, including user immersion, regulatory alignment, and achieving high levels of physical realism, and propose future directions in which XR-integrated drone training systems can advance.
Open Access
Article
17 September 2025An Approach to Simulation & Navigation of Autonomous Unmanned Aerial Vehicle in 3D
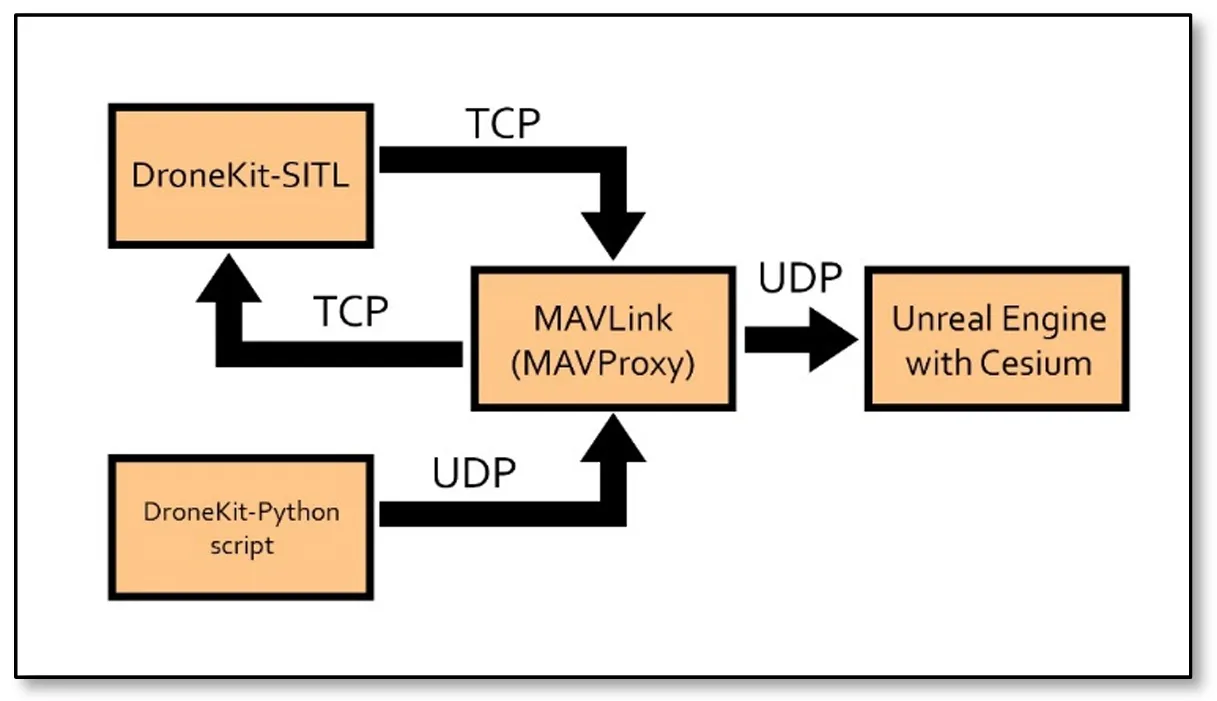
Drone simulation refers to the emulation of Unmanned Aerial Vehicles (UAVs) in a virtual environment, replicating real-world conditions to study and test the behavior, performance, and functionalities of drones. This paper explores the simulation of UAVs in the Unreal Engine environment using MAVProxy (Micro Air Vehicle Proxy) and the Python library DroneKit. By leveraging the computational capabilities of computers, this approach enables precise visualization and control of UAV flight dynamics in three dimensions. The use of Blueprints in Unreal Engine facilitates a cost-effective and accessible simulation process, allowing engineers and scientists to refine their UAV designs before real-world deployment. Results show the applicability of this approach vs. different environments, where an alternative approach also emerges as a viable option for visualizing textured buildings. This approach shows the power of open-source collaboration in advancing innovative solutions in the dynamic field of science and technology.
Open Access
Communication
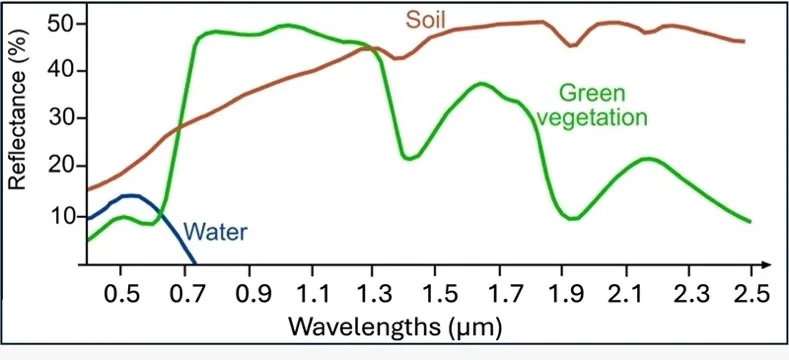
26 June 2025Production and Calibration of a Lambertian Surface Based on Barium Sulfate (BaSO4) for the Calibration of Multispectral Cameras
Drones, or unmanned aerial vehicles (UAVs), are increasingly utilized across diverse fields such as agriculture, environmental analysis, and engineering due to their ability to capture high-quality multispectral imagery. To ensure the accuracy of these images, radiometric calibration of onboard multispectral cameras is essential. This study aimed to develop and calibrate a low-cost Lambertian surface using barium sulfate (BaSO4) for radiometric calibration of UAV-mounted multispectral cameras. A stainless steel mold was designed to compact BaSO4, and the resulting surface was calibrated using an ASD FieldSpec HandHeld UV/NIR spectroradiometer and a Spectralon plate as the reference standard. Results showed a strong correlation (Pearson’s r = 0.9988) between the BaSO4 surface and the Spectralon plate, confirming that the BaSO4-based surface is a cost-effective alternative for producing diffuse Lambertian surfaces with performance comparable to the standard.
Open Access
Article
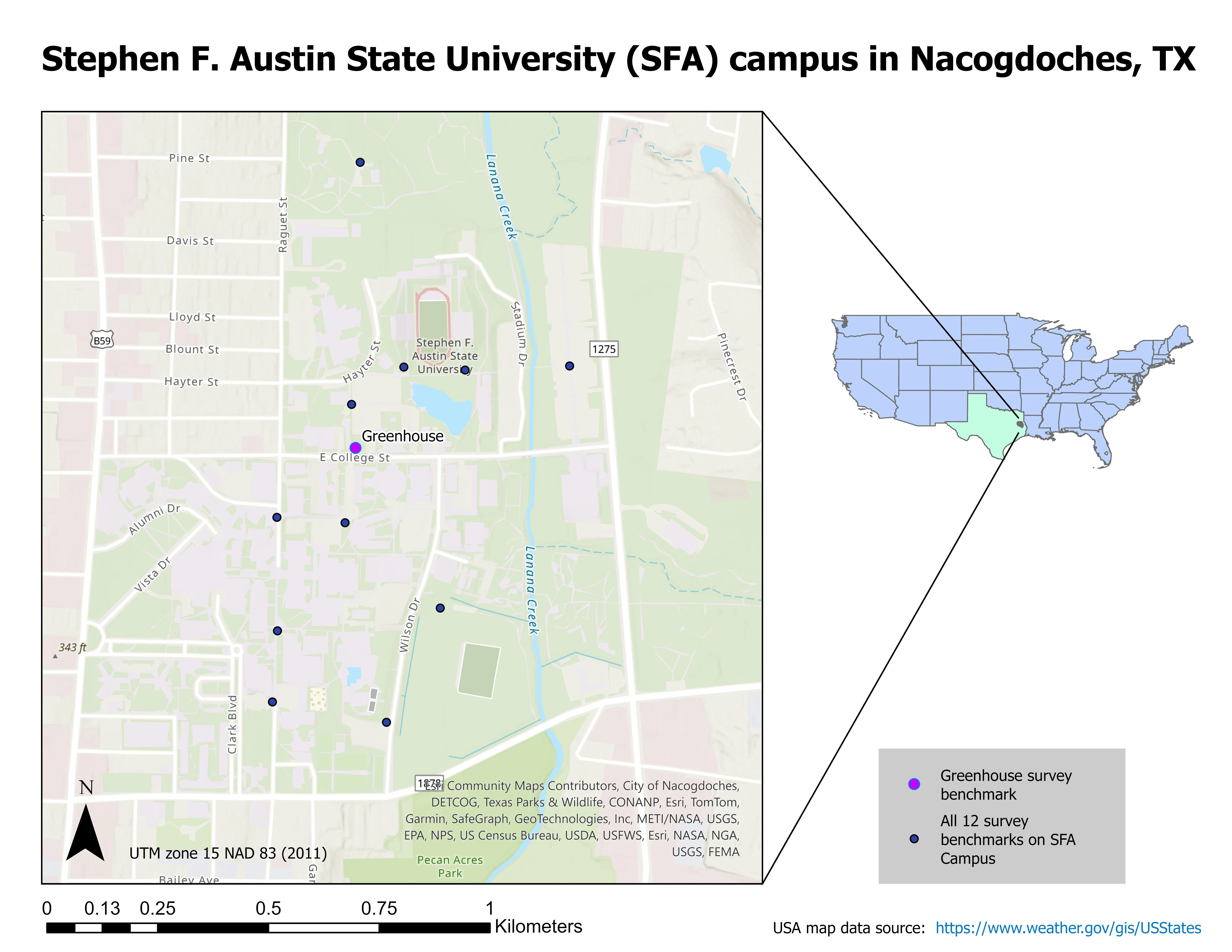
08 May 2025Evaluating Orthophoto Mosaic Accuracy Using RTK UAVs and AeroPoints 2 Ground Control Points: A User’s Perspective
With the growing use of Real Time Kinematics (RTK) Unmanned Aerial Vehicles (UAVs) and advancements in ground control points (GCPs), assessing positional accuracy of UAV derived orthophoto mosaics is crucial. This study aimed to improve UAV aerial image accuracy for more reliable orthophoto mosaics by examining the positional accuracy of orthophoto mosaics derived with (1) an RTK UAV; and (2) an RTK UAV combined with AeroPoints 2 GCPs. We tested two GPS base station methods for the RTK UAV: self-determined and manually assigned coordinates. The manually assigned coordinates resulted in significantly lower root mean square error (RMSE = 0.0729 m) compared to the self-determined method (RMSE = 1.9762 m), indicating improved accuracy. For the AeroPoints 2 GCPs, we recorded coordinates from a central GCP at a known location and four additional GCPs placed in each cardinal direction. The AeroPoints 2 system showed lower RMSE at all points compared to the RTK, with the central GCP at 0.0136 m, indicating high accuracy. These findings suggest that while RTK UAVs improve accuracy with manual base station assignment, incorporating AeroPoints 2 GCPs provides consistently higher precision across multiple locations. The study highlights the potential of AeroPoints 2 GCPs and suggests further research opportunities to enhance RTK UAV accuracy in areas lacking GPS correctional networks.
Open Access
Article
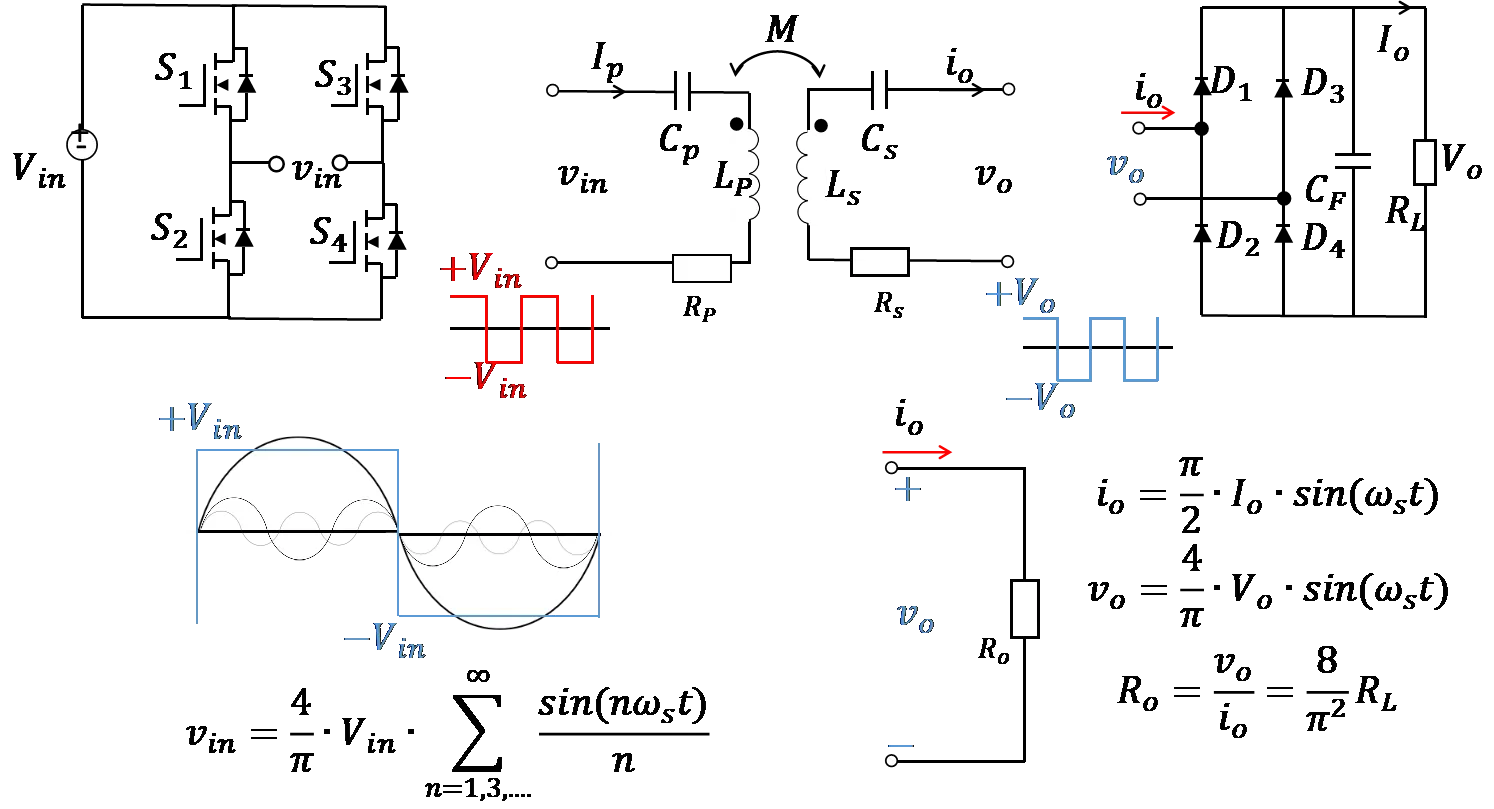
06 May 2025High-Efficiency Wireless Charging System for UAVs Based on PT-Symmetric Principle
To address the limited endurance of unmanned aerial vehicles (UAVs) and the efficiency degradation and instability in traditional wireless charging systems, this study proposes a high-efficiency UAV wireless charging system based on the parity-time (PT) symmetric principle. A non-Hermitian coupled resonator model is established, incorporating a dynamic gain-loss balancing mechanism and real-time parameter feedback control to adaptively compensate for coupling coefficient fluctuations caused by UAV positional deviations, thereby maintaining PT-symmetric phase stability. The receiver coil adopts a planar air-core spiral structure and is integrated beneath the UAV landing gear to minimize interference with aircraft operations. Experimental results show a transmission efficiency of 90.2% at 65 W output power, with both power and efficiency remaining stable in the strong coupling region. The system demonstrates strong robustness against horizontal misalignment and eliminates the need for complex relay structures or high-precision alignment. This work not only provides a theoretical foundation for the application of PT-symmetry in wireless power transfer but also offers a novel technical pathway for enhancing UAV endurance.
Open Access
Article
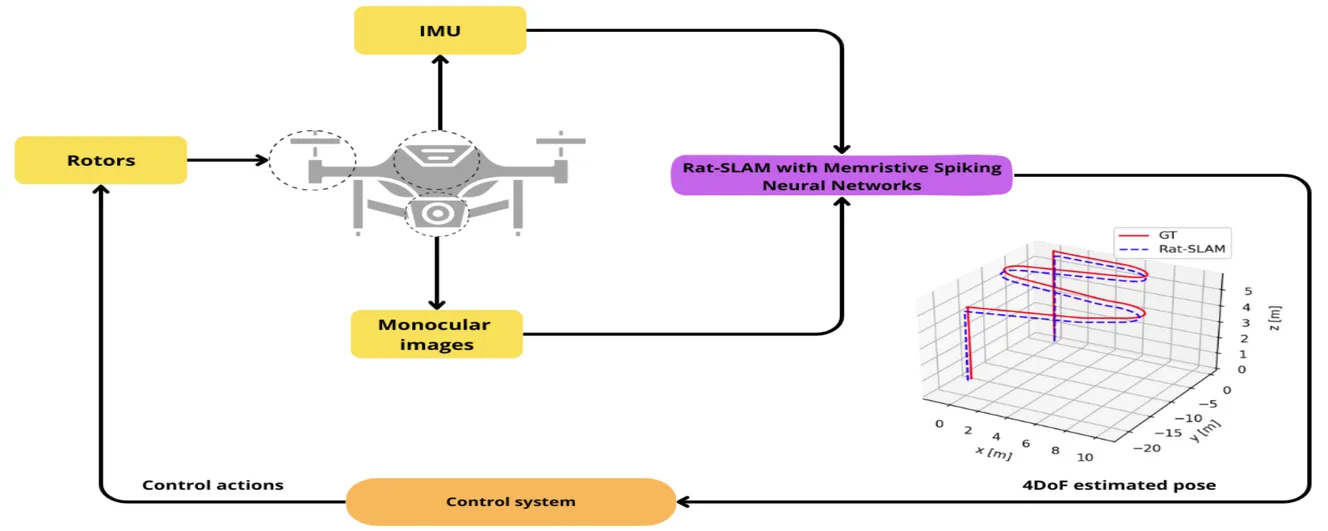
18 February 20254DoF Rat-SLAM with Memristive Spiking Neural Networks for UAVs Navigation System
Unmanned Aerial Vehicles (UAVs) are versatile platforms with potential applications in precision agriculture, disaster management, and more. A core need across these applications is a navigation system that accurately estimates location based on environmental perception. Commercial UAVs use multiple onboard sensors whose fused data improves localization accuracy. The bioinspired Rat-Simultaneous Localization and Mapping (Rat-SLAM) system, is a promising alternative to be explored to tackle the localization and mapping problem of UAVs. Its cognitive capabilities, semi-metric map construction, and loop closure make it attractive for localization in complex environments. This work presents an improved Rat-SLAM algorithm for UAVs, focusing on three innovations. First, Spiking Neural Networks (SNNs) are incorporated into Rat-SLAM’s core modules to emulate biological processing with greater efficiency. Second, Neuromorphic Computing models the neurons of the SNNs, assessing the feasibility of implementing SNNs on specialized hardware to reduce software processing, a key advantage for UAVs with limited onboard resources. Third, SNNs are developed based on the Memristive Leaky Integrate-and-Fire model, integrating memristors into artificial neurons to leverage their low power and memory properties. Our approach was evaluated through trajectory simulations using the Hector Quadrotor UAV in the Gazebo environment within the Robot Operating System, yielding valuable insights and guiding future research directions.
Open Access
Review
06 August 2024Considerations for Unmanned Aerial System (UAS) Beyond Visual Line of Sight (BVLOS) Operations
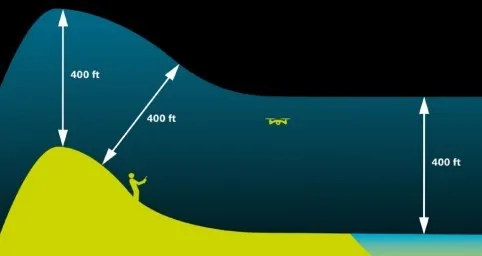
This paper, intended for expert and non-expert audiences, evaluates the technical and regulatory requirements for Unmanned Aerial Systems (UAS) to operate beyond visual line of sight (BVLOS) services. UAS BVLOS operations have the potential to unlock value for the industry. However, the regulatory requirements and process can be complex and challenging for UAS operators. The work explored the BVLOS regulatory regime in the UK, Europe and the US and found similarities in process and requirements covering themes like Detect and Avoid (DAA), Remote identification and Reliable Connectivity. A unifying goal across these jurisdictions is to operate BVLOS safely and securely in non-segregated airspace. However, operating BVLOS in segregated airspace as the default or routine mode could accelerate approval and adoption. The paper reviewed existing challenges, highlighting Coverage, Capacity and Redundancy as critical for UAS BVLOS Operations. The work also highlighted the crucial role of Non-terrestrial Network (NTN) assets like Satellites and HAPS (High Altitude Platform Station) since terrestrial networks (not optimised for aerial platform coverage) may not be reliable for BVLOS connectivity.
Open Access
Article
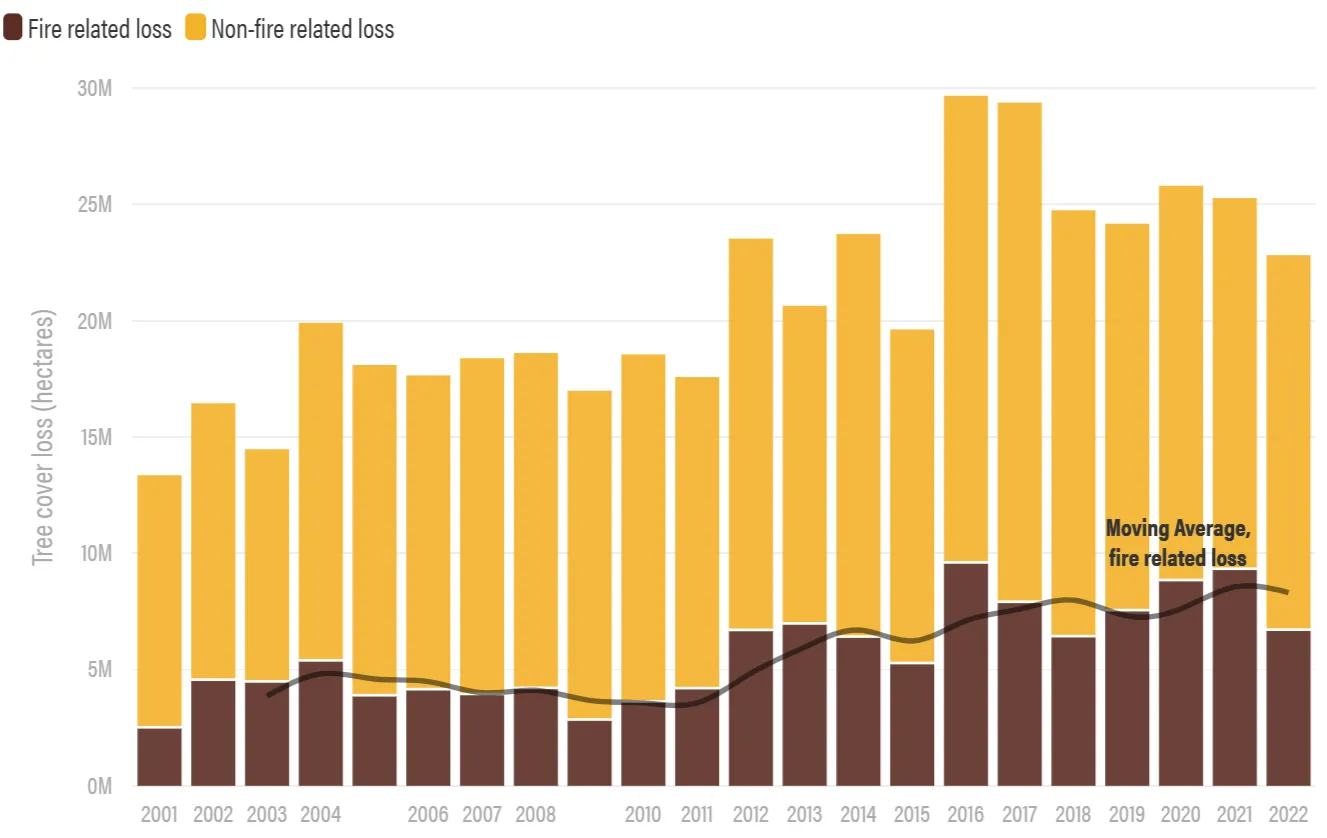
25 July 2024A Distributed Framework for Persistent Wildfire Monitoring with Fixed Wing UAVs
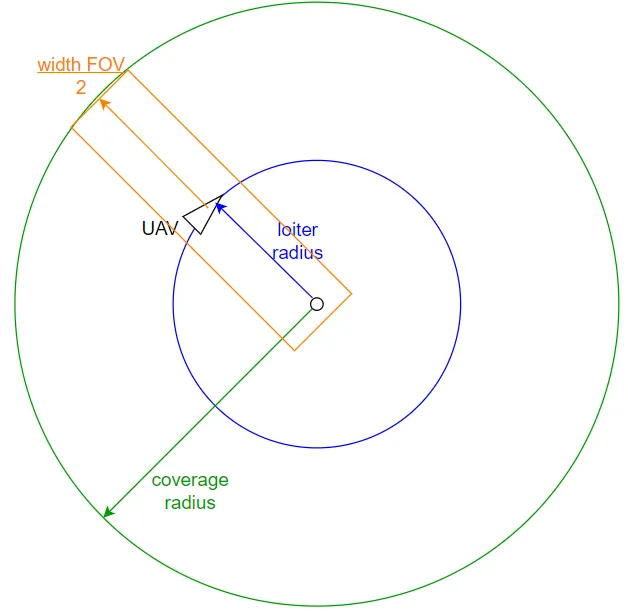
Wildfires have proven to be a significantly exigent issue over the past decades. An increasing amount of research has recently been focused on the use of Unmanned Aerial Vehicles (UAVs) and multi-UAV systems for wildfire monitoring. This work focuses on the development of a decentralized framework for the purpose of monitoring active wildfires and their surrounding areas with fixed wing UAVs. It proposes a distributed fire data update methodology, a new formation algorithm based on virtual forces, fine-tuned by a Genetic Algorithm (GA), to arrange virtual agents into the monitoring area, and a control strategy to safely and efficiently guide fixed wing UAVs to loiter over the structured virtual agents. The system is tested in Software In The Loop (SITL) simulation with up to eight UAVs. The simulation results demonstrate the effectiveness of the system in monitoring the fire in a persistent manner and providing updated situational awareness data. The experiments show that the proposed framework is able to achieve and maintain coverage up to 100% over the area of interest, and very accurate fire representation. However, the performance is decreased for the experiments with low UAV numbers and large fire sizes.
Open Access
Article
05 June 2024An Architecture for Early Wildfire Detection and Spread Estimation Using Unmanned Aerial Vehicles, Base Stations, and Space Assets
This paper presents, an autonomous and scalable monitoring system for early detection and spread estimation of wildfires by leveraging low-cost UAVs, satellite data and ground sensors. An array of ground sensors, such as fixed towers equipped with infrared cameras and IoT sensors strategically placed in areas with a high probability of wildfire, will work in tandem with the space domain as well as the air domain to generate an accurate and comprehensive flow of information. This system-of-systems approach aims to take advantage of the key benefits across all systems while ensuring seamless cooperation. Having scalability and effectiveness in mind, the system is designed to work with low-cost COTS UAVs that leverage infrared and RGB sensors which will act as the primary situational awareness generator on demand. AI task allocation algorithms and swarming-oriented area coverage methods are at the heart of the system, effectively managing the aerial assets High-level mission planning takes place in the GCS, where information from all sensors is gathered and compiled into a user-understandable schema. In addition, the GCS issues warnings for events such as the detection of fire and hardware failures, live video feed and lower-level control of the swarm and IoT sensors when requested. By performing intelligent sensor fusion, this solution will offer unparalleled reaction times to wildfires while also being resilient and reconfigurable should any hardware failures arise by incorporating state of the art swarming capabilities.