Found 2 results
Open Access
Article
05 March 2026Light-Guided Autonomous Drone Navigation for Indoor GPS-Denied Environments
Autonomous drones operating in indoor environments cannot rely on the global positioning system (GPS) signals for precise navigation due to severe signal attenuation and multipath interference in GPS-denied spaces. This paper presents a novel Li-Fi-based optical positioning, and combined with high-sensitivity photodiode sensor arrays, to enable robust drone guidance in challenging indoor environments where conventional radio-frequency localization fails. The proposed system uses strategically distributed ceiling-mounted Light Emitting Diode (LED) luminaires across the operational space, each transmitting unique identification codes through high-frequency light modulation at rates imperceptible to human vision, thereby maintaining dual functionality for simultaneous illumination and positioning. Unlike existing VLC positioning studies that focus on static receivers, our system integrates real-time optical localization directly into the UAV control loop at 120 Hz, achieving closed-loop autonomous navigation without GPS or RF assistance. The system demonstrates sub-decimetric positioning accuracy (<8 cm), low latency (4.2 ms), and operates successfully on resource constrained micro-UAV platforms (250 g quadcopter with STM32 microcontroller. OpenELAB Technology Ltd., Garching bei München, Germany). Experimental validation includes complex 3D trajectory tracking, multi-room scalability analysis, and quantitative comparison with existing localization technologies, confirming the viability of Li-Fi guided autonomous flight for practical indoor application.

Open Access
Article
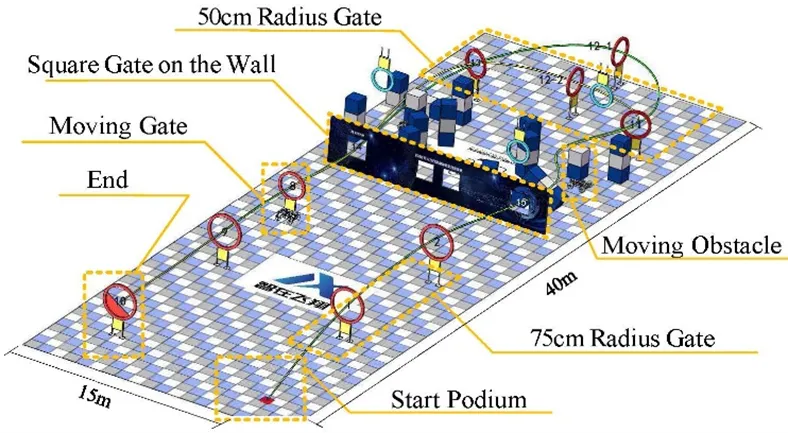
26 January 2024A Lightweight Visual Navigation and Control Approach to the 2022 RoboMaster Intelligent UAV Championship
In this paper, an autonomous system is developed for drone racing. On account of their vast consumption of computing resources, the methods for visual navigation commonly employed are discarded, such as visual-inertial odometry (VIO) or simultaneous localization and mapping (SLAM). A series of navigation algorithms for autonomous drone racing, which can operate without the aid of the information on the external position, are proposed: one for lightweight gate detection, achieving gates detection with a frequency of 60 Hz; one for direct collision detection, seeking the maximum passability in-depth images. Besides, a velocity planner is adopted to generate velocity commands according to the results from visual navigation, which are enabled to perform a guidance role when the drone is approaching and passing through gates, assisting it in avoiding obstacles and searching for temporarily invisible gates. The approach proposed above has been demonstrated to successfully help our drone passing-through complex environments with a maximum speed of 2.5 m/s and ranked first at the 2022 RoboMaster Intelligent UAV Championship.