1. Introduction
The broad spectrum of work or activities that make up the mining and tunnelling sector are denoted by their complexity and occupational hazards, as miners and workers are exposed to hazardous environmental conditions such as high and low temperatures, noise, manual handling of loads, sudden increases in toxic gases, dust, low oxygen levels or dangerously flammable gases [
1,
2,
3]. Although the traditional ways of measuring the concentrations of these gases are through fixed platforms such as samplers and portable gas detectors carried by workers on foot, they are not able to recognise sudden or short-lived contamination events nor to correctly account for the variability and spatial distribution of the gases as they are subjected to long time intervals that can last for weeks for their operation and measurement [
4]. At the same time, they are placed in very specific areas of possible gas emissions, preventing a real-time survey of the entire area and the ability to act promptly in the event of instantaneous gas releases in areas of little interest, even in areas of the mine where the workings have already been abandoned.
Additionally, having fixed sensors only provides data at spatially low resolutions and does not allow them to track pollution fluctuations in spatial dimensions [
5].
In mining, drones have had numerous applications and advantages. Considering safety, two of them can be presented as the main benefits or uses. One is the rapid inspection that can be obtained by equipping a drone to inspect cavities in case of emergency or hazard identification. The other is the inspection and unblocking of collapsed voids and ore passages, allowing the freeing of trapped workers or the continuity of production [
6]. Drones can be beneficial and cost-effective in surface mining for monitoring, mapping, determining topographic changes, optimising slope angleand collecting geotechnical data from areas that are difficult or impossible to access, among others, while minimising the need for skilled labour for complex activities that are considered too dangerous and the time required to complete the work, which leads to the reduction of production cost [
7].
Today’s most widely used portable gas detection equipment are the ALTAIR 4X [
8], the iBrid MX6 Multi-Gas Monitor [
9] and the Dräger X-am 5300 [
10].
Some limitations of these equipment are that they cannot be used in oxygen-rich or deficient atmospheres, reducing atmospheres, furnace chimneys, inert environments or atmospheres containing combustible mists/dust in the air. Therefore, a bump test should be performed to determine if the atmosphere contains any material (silicones and organic silicates andlead-containing compounds) that can desensitize the combustible gas detector and reduce its readings.
In addition to the foregoing, they should not be used to test gases in atmospheres containing liquid vapors with a high flash point. Considering toxic gases, some devices only monitor carbon monoxide (CO) and hydrogen sulfide (H
2S) concerntrations. Environmental factors can affect gas sensor readings, including changes in pressure, humidity and temperature.
Cross sensitivities or interfering gases during measurement work when applying some devices, such as iBrid Mx6 and Dräger X-am 5300, can cause the sensor electrode to react, resulting in false readings that compromise the sensors and endanger the health of workers [
11].
The batteries are a critical factor; in some cases, the device requires two alkaline batteries to be replaced simultaneously. Failure to do so could result in an explosion. Also, these batteries should not be charged or serviced in oxygen-rich atmospheres.
The ECODRONE project is an ambitious cross-regional and cross-sectorial collaboration that aims to create a new innovative solution for the mining sector, ensuring occupational health & safety in underground working environments accurately and cost-effectively. Underground mines and tunnels are characterized by tough working and hazardous environmental conditions. In such environments, serious accidents may occur due to a sudden rise in toxic gasses, dust, dangerously flammable gasses or low-oxygen.
These conditions highlight the need for modernised techniques and tools that are safer and more effective. Such developments would support the development of mining activities while protecting the health and safety of workers.. In response to these latent situations, ECODRONE is developed as an alternative strategy that enables an unmanned remote tool in the mining sector, capable of fulfilling all its activities, such as exploration, inspection, detection, monitoring and data collection, without the need to expose the human factor to dangerous environmental conditions.
Through the technological development of the project called ECODRONE, the consortium of the companies Perforaciones Noroeste S.A (Spain), Vertliner P.C. (Greece) and Feron Technologies P.C (Greece) aims to provide the market with a tool for environmental control and prevention in the mining sector. This solution must be a cost-effective, safe and efficient alternative for monitoring levels of exposure to hazardous gases in underground environments, mining workings and confined areas of difficult access in an automated way through advanced drone and loT technologies. It also promotes the strategy of the MINE.THE.GAP project aims to create innovative solutions in this sector, ensuring occupational health and safety in a precise and cost-effective way. Promote inter-regional and multidisciplinary collaboration to further utilise the results beyond the end of the project.The project involves the development and integration of innovative robotics and Internet of Things (IoT) technologies into a custom-built unmanned aerial vehicle, a relevant issue for countries with high potential in mining currently in development.
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under Grant Agreement No. 873149. MINE THE GAP. (https://h2020-minethegap.eu/projects/) to 150,000 €.
The MINE.THE.GAP vouchers support projects that bring together technology service providers and SMEs operating in the raw materials and mining sectors to create new and improved value chains. Through MINE.THE.GAP, these European SMEs that belong to the 9 target countries eligible, can enter new collaborations to develop products, technologies, solutions, and services for the raw materials and mining sectors. MINE Demo Voucher (provides financial support up to 50,000 € per SME of each consortium for the development, testing and demonstration in a production environment of a simple, functional pilot with all the major features of the product/service/solution foreseen This voucher must address the challenges and value chain of the raw materials and mining sector and focus at least one of the topics to be funded.
The solution is co-developed by two Greek ICT technology companies, VERTLINER and FERON TECHNOLOGIES, and will be adopted by the Spanish mining/drilling company PERFORACIONES NOROESTE.
Scope
Currently, companies working in the mining/drilling sectors use traditional handheld methods to perform on-demand gas measurement and reporting campaigns to ensure they meet the gas concentration limits. The current project aims to digitalise the current process of occupational health and safety monitoring, with a profound beneficial impact onon adopters.
The project aims to develop a customised UAS to automate the measurement of multiple hazardous gas concentrations in underground operations to improve safety conditions. FGP & CTM will lead the project’s transversal activitiesand manage the consortium through the EITRM programme to ensure the achievement of the milestones. VERTLINER & INSIGHIO, as technology providers, will develop the UAS for configuration, testing and validation, cloud data storage, software development, user interface development and sensor communication. Data interpretation will be handled by PERSONA, which will provide industrial data for the two business cases, representing the end users of each case study, and validate the solution in the field. The two case studies will focus on mining and construction, as these industries will benefit the most from the development.
The implementation of autonomous UAVs facilitates the use of innovative mapping and inspection techniques, improving the safety of mining operations and the public perception of mining activities, supporting mining in our backyards and helping to ensure CRM supply in Europe.
In particular, novel robotics and IoT technologies are developed and integrated into a tailor-made UAV embedding an IoT-based multi-gas sensor platform to automate the concentration measurement of hazardous gases in hard-to-reach places.
Hence, the tangible objectives of this initiative are listed below:
- To develop a UAV prototype that can perform on-demand gas measurement campaigns during mining and tunnelling operations.
- Evaluate the solution in real working operational conditions and installations where mining works are carried out.
- Analyse and compare the data collected on gas and dust concentrations in different tunnel sections with reports obtained using the traditional manual method of measurement.
- Demonstrate that the use of drones are intended to reduce the inspection time of underground mine workings by up to 70% and extend the audit range up to 10 km in a single day.
- Drive the digitisation of the mining sector through the application of innovative technologies aimed at improving sustainability, design, safety and reducing the cost of operations.
- Highlight the importance of innovative occupational safety measures for workers in such challenging conditions.
The new tool addresses two important pains of the mining sector:
(1) To increase the safety in mining operations through automated technologies, information and communication flows, which increase efficiency in the consumption of resources. All of the above implies integration with circular economy and respect for both European and global efficiency policies aimed at sustainability, industrial modernization, human health and the environment.
(2) To promote digitization in the mining sector: A UAS device capable of guaranteeing the measurement and continuous monitoring of concentrations will be designed, tested and commercialized. Through innovative technologies, the system will replace current technologies, which, although capable of detecting and measuring environmental parameters and conditions, imply a slow, routine process largely dependent on the human factor. It saves productive expenses in the sector since it reduces costs compared to hiring a field technician for activities such as analysis of environmental conditions. On an annual salary of 27,500 €/year for a safety technician performing environmental control inspections, the use of UAVs allows a monthly saving of 2300 € and, therefore, of 110 €/day in the mine operation for each safety technician who no longer performs air quality or gas concentration measurements in the mine. It also obtains a 3D spatial distribution of contaminants a high sample resolution, and it reduces inspection time in mining works and the data collection time by more than 50%. This time reduction is justified because the sampling operation along the mine is performed on foot by a safety technician equipped with a portable gas detector, instead of a UAV that performs the flight daily, analyzing twice the distance.
Dust concentration values in mining are relatively higher than those of O
2 and CO
2 concentration. Still, the control of the latter two is much more important for the safety of miners, as they are gases with very narrow ranges. OSHA states that the minimum “safe level” of oxygen in a confined space is 19.5%, while the maximum “safe level” of oxygen in a confined space is 23.5%.
Since low oxygen levels are the leading cause of death in confined spaces, it is critical to measure the oxygen level accurately. Workers should sample the oxygen level before entering a confined space and monitor it continuously throughout the job.
If the oxygen concentration in a confined space exceeds 23.5%, it means an excess of oxygen could cause combustible gases to ignite. On the other hand, low oxygen levels can affect judgment and coordination. Extremely low oxygen levels cause nausea, vomiting and loss of consciousness. When oxygen levels are too low, it usually means that another gas is displacing it. In these cases, knowing which gas displaces the oxygen and why is important.
2. Description of the Problem
The potential for serious accidents in underground mines and tunnels is increased by sudden risks arising from toxic gases, dust, highly flammable gases, and low-oxygen conditions. Additionally, blasting operations pose a significant hazard, as they can release dangerous gases and compromise the overall stability of the facility, thereby escalating the likelihood of accidents.
Currently, gases are measured in underground operations with portable instruments brought by the operators. However, these systems depend on a worker taking samples sporadically in the workplace. The measurement scope is 1 m from the floor, not providing figures from the upper part of the tunnel, where the gases are usually accumulated.
Despite significant advancements in drone technology and numerous potential applications in mines (e.g., 3D model by Exyn Technologies drones for underground mapping, DJI M30 drones for open atmosphere monitoring, AMICOS drone for SO2 leaks detection in open atmospheres), the use of drones has been limited due to several challenges like GPS-denied environments, confined spaces, lack of wireless signal, the concentration of dust and gases, and generally harsh environments. The market has no solutions for automated atmosphere monitoring in GPS-denied environments.
The project aimed to develop a pilot UAV prototype to test O2 and CO2 gas measurements in underground mining and compare them with current methods of gas recording using portable or fixed sensors. In this way, this pilot project will try to validate and check if these measurements are in range and can be valid for using a drone in environmental measurements. These two gases have been chosen as the most representative and important gases because of their importance in miners’ daily work.
In our project, we have not included the dust concentration because of the dispersion caused by the dust concentration values of the UAV’s own propellers. The purpose of this project is to be a pilot to demonstrate that the recorded gas measurement values are similar in magnitude to those recorded with portable or fixed sensors installed in the mine.
The companies participating in the project are:
Vertliner P.C. is a field robotics company specialised in the construction sector that is developing autonomous flying robots for the end-to-end indoor assessment of building assets. Construction 4.0 is our domain, while precision, safety and efficiency are the values of our offering. Funded in 2021 and located in Patriarchou Grigorou E’ & Neapoleos 27 Street, 15341 Athens, GREECE.
Insigh.I.O. is a provider of IoT hardware, software, and consulting services for businesses of all sizes. The company offers from conception to final product with a unique application-agnostic hardware and software technology stack to overcome the technological entry barriers that prevail today to boost the IoT uptake, relying on an in-house developed technology and a fast-track IoT applications design and implementation service, enabling businesses to adopt IoT (Internet of Things). Located in 30 Arachovis Street, Athens, 10681, Greece.
Perforaciones Noroeste S.A. is a service company dedicated to the execution of all types of drilling and blasting, both in the field of mining and quarrying and in public or private civil work development. Founded in 1984 and located in Place Longoria Carbajal 3, Oviedo (Asturias), Spain.
3. Methodology
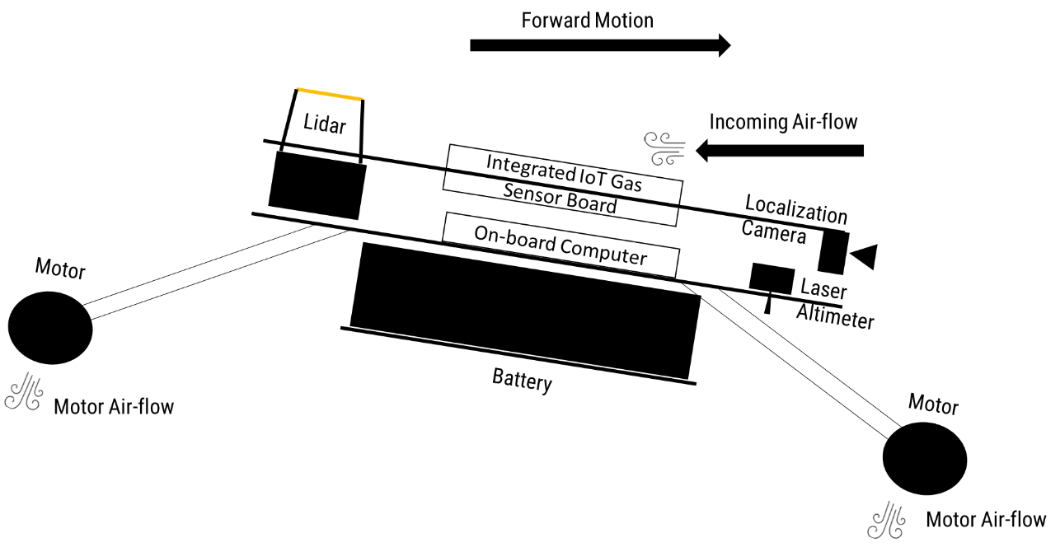
The UAV hardware design () was adapted based on the current TRL 5 version of VERTLINER’s drone, covering the requirements of the gas inspection mission. More specifically, as shown in , the design integrates the required sensors for localization and obstacle avoidance (e.g., Lidars, cameras, ultra-wideband radars) that allow safe navigation in the indoor environment of an underground mine or tunnel. Furthermore, the integrated IoT Gas Sensor Board was installed on the upper side of the UAV to receive unobstructed airflow during the UAV motion, also avoiding misleading measurements coming from the motor airflow.
Based on the total weight of the required payloads, the motor characteristics and the battery capacity were chosen to achieve the required flight time.
The general procedure to get the desired output is described in the following steps:
- Semi-autonomous UAV flight in the tunnel.
- Getting the data from the UAV to the single-board computer.
- Processing the data using a custom-made algorithm.
- Extracting the data in the form of a colourful map regarding the concentration of the measured gasses.
. Preliminary mechanical design of the ECODrone UAV. The Integrated IoT Gas Sensor board was mounted on top of the UAV to receive unobstructed airflow.
The navigation strategy was built upon the current know-how of VERTLINER precision flight in a confined indoor environment, coming from the company’s activity in the construction sector. The developed approaches were adapted to cope with the challenges of an application in a tunnel, such as that of the ECODrone. Firstly, accurate localization is used as feedback to the vehicle’s controller, which is used to stabilize the UAV flight and support the pilot. The localization is achieved with visual and laser data, properly fused with the vehicle’s dynamics, leading to accurate state estimation. In case harsh conditions are met in the tunnel, such as excessive dust or lack of visual features, the localization is supported with ultra-wideband technology.
The control strategy enhances the operational abilities of the ECODrone UAV. In particular, a shared control scheme was developed integrating obstacle avoidance capabilities to the vehicle’s operation, utilizing the input from the lidar sensors. A safety perimeter is set around the vehicle, protecting it from collisions with the surrounding structure. In this way, even in the case of erroneous control commands by the operator, the UAV will operate safely in the tunnel.
During the development of this test phase of the project, our UAV pilots developed manually controlled flights to directly manage the analysis of O
2 and CO
2 gas concentration data. The comparison of these values collected with UAVs versus the concentration values recorded by portable equipment is the basis of the justification for the use of UAVs for in-mine environmental measurements.
In the evolution of this project, tracking bases located as positioning beacons along the subway mine will be used to guide the UAV in its daily inspection. The future development will also involve the installation inside mines of UAV battery charging bases to which the drone will go to recharge energy and download the gas concentration values collected during the flight.
3.2. Initial System Architecture
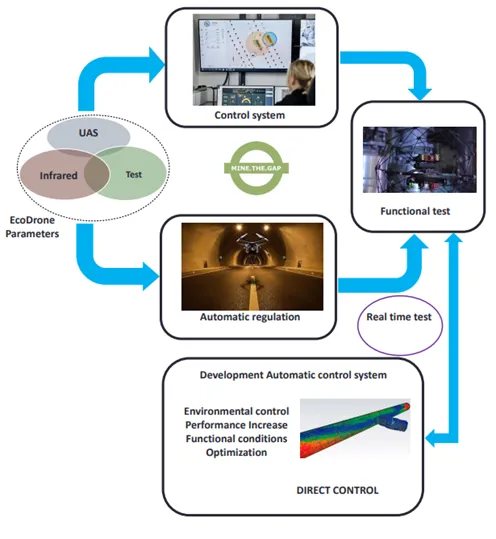
provides a graphical overview of the key system concept and architecture, as seen by the adopter’s viewpoint. It includes the gas concentration measurement and analysis in the Health & Safety control system. This concept is transformed into a tangible process utilizing a purpose-built Unmanned Aerial Vehicle hosting a highly customizable IoT platform.
. ECODrone Initial System concept & architecture.
The IoT platform is based on an end-to-end IoT hardware & software solution, initially developed internally in FERON TECHNOLOGIES and subsequently evolved and commercialized under the insigh.io brand. The specific solution accelerates IoT adoption through a unique technology stack. The stack includes two core modules, a modular and expandable hardware device operating in the field and a flexible software suite responsible for managing devices, andcollecting and distributing sensor measurements. In particular:
- The IoT hardware stack includes an autonomous plug-and-play node with numerous sensor interfaces and connectivity options, ready to be tailored to different verticals, addressing the challenges of simplifying and making affordable the deployment of IoT technologies in the field. It integrates in a unique technological way multiple power-supply options with automatic power management; practically every connectivity technology; numerous analogue and digital sensor interfaces and protocols; special hardware recovery modules for unobstructed and unattended operation and infinite customization capabilities. It follows a modular design, comprising a main board and a set of application/sensor-specific “add-on” or “shield boards”.
- The IoT software stack comprises the software running on the device (firmware) and a Cloud Platform [12]. Each device comes with either pre-installed deploy-ready firmware or an open-source codebase that can be freely modified to host any possible application, with zero or low-code development. The Cloud platform mainly manages and collects data from remote IoT devices. Going beyond secure device onboarding, the platform allows for over-the-air configuration, solving one of the core challenges in large-scale IoT remote deployments. It also offers a lean user-interface for visualizing sensor data and various on-demand add-ons, such as alerting. The platform has ready-made integrations for ejecting data to 3rd party platforms and a complete API for creating fully customized interconnections. It is built upon microservices to be hosted in the cloud or installed on-premises.
The following sections present the corresponding product enhancements applied to deliver a tailor-made edition of insigh.io hardware and software that meet the needs of the ECODRONE project.
3.3.1. Hardware
The core elements and functionalities are already embedded in the insigh.io “main” board. These include the micro-controller, power management, WiFi & Cellular Connectivity, on-board GPS, diagnostic sensors and debugging ports. The main board comprises a 30-pin header, which makes available numerous power and IO options, supporting various analogue and digital sensors and “preintegrated” add-on boards. It also includes a 10-pin header supporting additional radio connectivity, like LoRa or Satellite IoT (development in progress). A USB port for optionally powering the board and supporting native 2-way serial communication is also available.
Given the capabilities of the device, it was decided to:
- Implement a new ECODRONE add-on/shield board that hosts the required gas sensors.
- Leverage the USB port as the primary means of powering the board and pushing the gas sensor readings to the custom UAV using a standard serial connection.
- Alternative power (battery-based) & interconnection (e.g., Wifi) approaches would be considered in later project stages if needed.
In the following subsections, a description of the designed add-on board will be provided, reporting:
- The gas sensors were selected for integration.
- The complete bill of materials (BOM).
- Snapshots from the PCB schematic/board/3D model design files (SCH, BRD, STEP)
- Photos from the first board production samples.
Oxygen gases (O
2) and carbon dioxide (CO
2) must be admitted, for which a search was carried out to identify candidate parts based on the following criteria:
- Manufacturer Credibility (no-name modules were excluded)
- PCB mountable (easing integration with insigh.io PCB)
- Flexible Digital Interface (e.g., I2C, which is a 3.3 V powered interface allowing the connection of multiple sensors in one shared bus or Analogue)
- Stock availability (of major importance due to global chip shortage)
- Compact footprint (ensuring alignment with the insigh.io PCB)
- Low energy consumption (relevant for battery-only operation)
Detailed hardware and software specifications provided by the manufacturer (for easing integration).
In , the exact parts selected for implementing the first iteration of the board are presented.
. List of Selected Sensors.
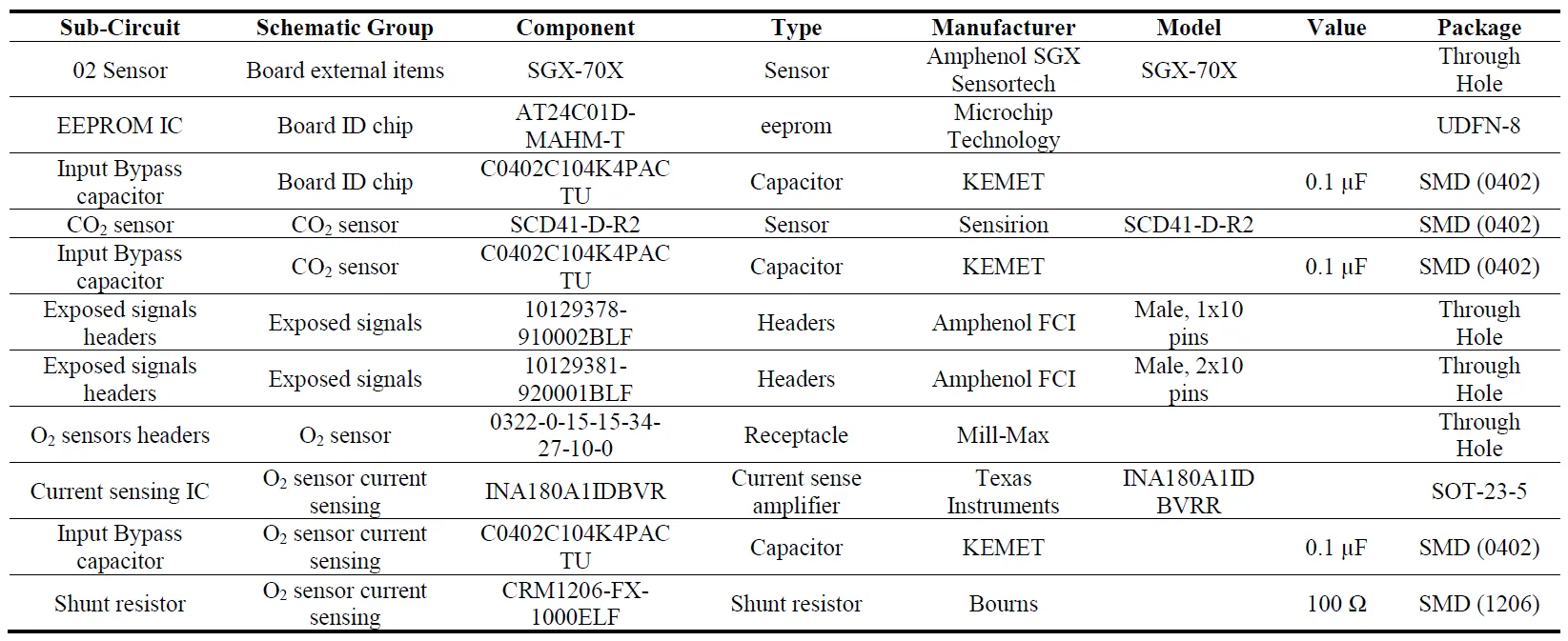
provides the detailed BOM for the designed model.
Except for the sensor parts listed above, the following additional components are included:
- 4 × capacitors (0.1 µF) are used as bypass capacitors in the power supply paths of the various ICs.
- 1 × EEPROM IC for enabling automatic shield identification.
- 1 × Current Sense IC (INA) & 1 Shunt Resistor (100 Ohm) for implementing the electronic circuit required to retrieve the O2 concentration.
- 2 (receptacle) sockets for mounting the O2 sensor to the PCB
- 1 × 2-row 10-pin & 1 × 1-row 10-pin male header pins for attaching the shield to the insigh.io main board female headers.
The total BOM cost when writing this deliverable is 66.80 €.
. IoT Hardware Board Bill of Materials.
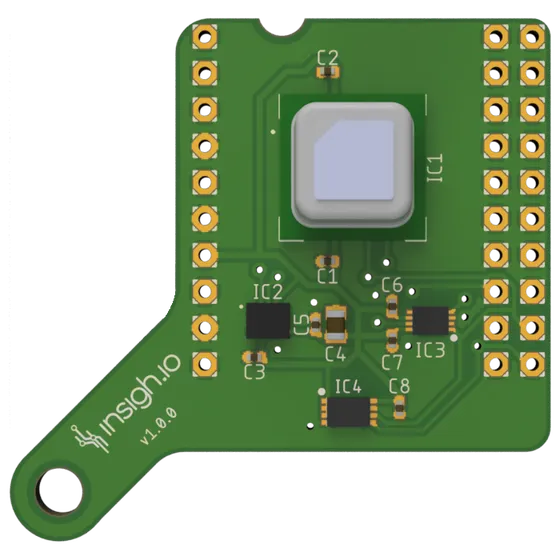
and show the 3D board renders, generated from the Design Tool (the O
2 sensor not shown here is mounted using J1 and J2 sockets).
. ECODRONE IoT Hardware Shield.
. ECODRONE IoT Hardware Shield.
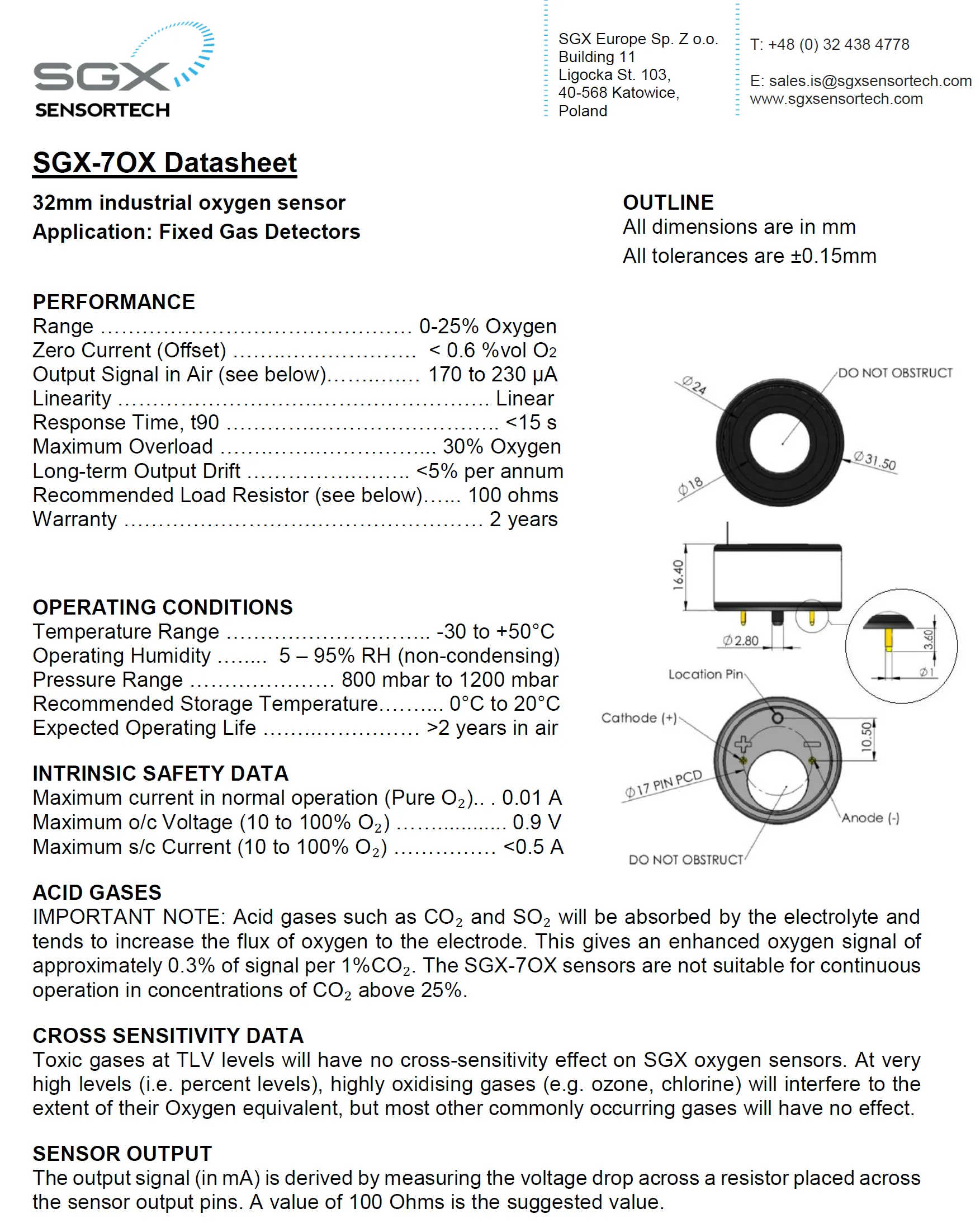
In , sample photographs of the produced device are provided, including the main PCB and the newly designed shield. In , sample Sensor Oxigen: SGX-7OX Datasheet.
. ECODRONE IoT Hardware Shield–Production Sample.
. Sensor Oxigen: SGX-7OX Datasheet.
Sensirion SCD4x Miniaturized CO
2 Sensors are CO
2 and RH/T sensors that fit in the space of just one cubic centimeter. These CO
2 sensors offer a 2.4 V to 5.5 V supply voltage range, fully calibrated digital I2C output, and ±(30 ppm + 3%MV) accuracy rating. Compared to the SCD30, the SCD4x footprint has been miniaturized by a factor of 5, resulting in dimensions of just 10.1 mm × 10.1 mm × 6.5 mm. With the use of the photoacoustic NDIR sensing principle, the dimensions of the optical cavity are greatly reduced without compromising sensor performance. CO
2 sensor is compliant with RESET, WELL, Title 24 and ASHRAE 62.1 building standards. The SCD4x series features a quality humidity and temperature sensor that delivers two additional sensor outputs. Sensirion SCD4x miniaturized CO
2 sensors are ideal for sensing markets such as IoT, automotive, HVAC, appliances, and consumer goods.
3.3.2. Firmware
The ECODRONE IoT device firmware is built upon the “insighioNode” Open-Source project, the latter being developed for more than 2 years. This project includes the core libraries, utilities and application scenario, enabling an insigh.io IoT device (node) to operate standalone or with the insigh.io cloud platform (console).
The project is implemented on MicroPython and tested on multiple ESP32 micro-controller architectures. It comprises more than 350 commits and 18 releases to date. The project handles in an automated way the sensor data collection (measurement triggering & sensor reading) for various digital and analogue protocols (I2C, UART, SPI, etc.) as well as data transmission to another endpoint using serial protocol or various wireless connectivity technologies like WiFi, Cellular IoT or LoRa.
Core project elements are summarized below:
- The lib folder includes all common utilities/functionalities for:
o getting low-level device information (device_info)
o setting/retrieving specific hardware-related states (gpio_handler),
o managing network connectivity (networking),
o setting up data transport methods (protocols),
o triggering sensor communication (sensors),
o enabling generic debugging and operation procedures (utils, logging),
o other procedures implemented independently from this project (external), such as data formation.
- The www folder includes the web configurator functionalities, an optional WiFi-based User Interface that allows end users to configure the device in the field easily.
- The apps folder hosts the executed scenario, from sensor reading through information encoding to the transmission of readings over an established network connection. The demo_console folder provides a typical application template that can be used as the starting point for creating new applications, like in ECODRONE.
- The main.py is the entry point called at each device reboot.
3.3.3. ECODRONE Enhancements
The existing codebase has been extended in 3 directions:
- Support for the newly integrated CO2 sensors. This sensor exposes an I2C communication interface with dedicated registers for configuration and measurement collection. The specific code enhancements can be found under the “sensors” folder.
- Support for the newly integrated O2 sensors. This sensor produces an output current proportional to the gas concentration, which, through a current sense circuit, is transformed into an analogue voltage drop. The firmware then translated this reading to O2 concentration using a linear model provided by the manufacturer, given a reference reading taken in (open) air. The specific code enhancements can be found under the “sensors” folder.
- Real-time data ingestion to external devices. The original code transmits the sensed data to the insigh.io Cloud platform using a wireless transmission technique. In the current setting, we push the data directly to the UAV using a standard serial connection (UART). The specific code enhancements can be found under the “custom_apps/mtg” folder.
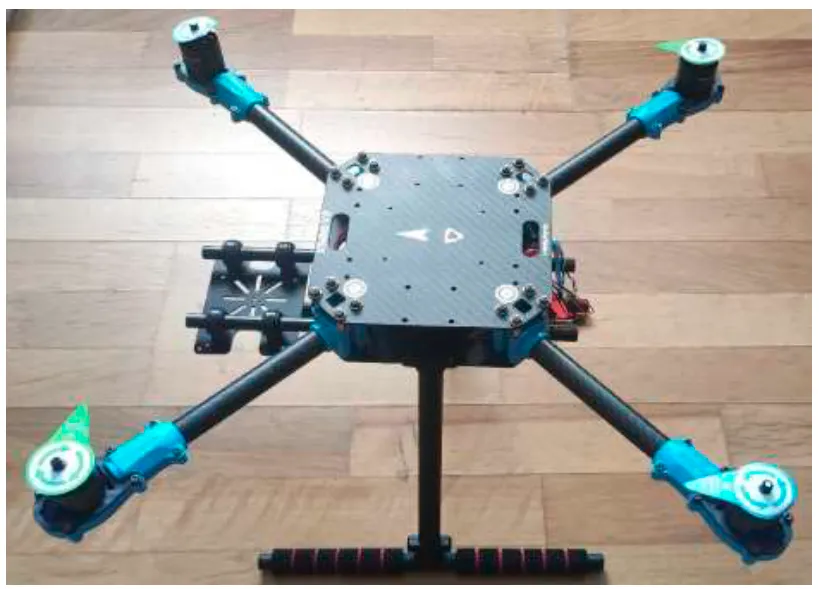
3.3.4. Customized Indoor UAV
For this project, a quadcopter UAV frame has been selected to host all the required sensors for the application and flight into the tunnel. The selected frame is the Holybro 500 V2 which has been chosen specifically to save time and money, contrary to a new customized design that could be more expensive.
The specifications of the UAV are the following:
- Motors—Holybro 2216 KV920 Motor
- ESCs—BLHeli S ESC 20A
- 1045 Propellers
- 4S battery 5300 mAh
- Frsky receiver R-XSR
- Orange Cube Flight Controller Unit(FCU)
- Telemetry mRo 433 MHz
- Frsky Taranis X-Lite radio controller
shows the ECODRONE UAV Frame.
Using this configuration, the UAV can fly for 12–13 min because there will be a payload between 3–4 kg. So, if the flight is carried out with a speed up to 2 m/s then a distance of approximately 600 m will be covered using a single battery. If the user requires more autonomy, this can be achieved easily by changing the motors-propellers and the battery configuration.
The payload of the UAV will be the sensor board that FERON has developed and described above, a Raspberry Pi 4B, a localization camera T265, a 2D Lidar Hokuyo and an altimeter. This set of sensors will assist the mission in achieving the desired outcome. In particular:
- The Raspberry Pi 4B will be used for various processes regarding the flight of the UAV and the data generated. The localization camera will produce the geo-tag inside the tunnel, where every concentration is observed.
- The 2D Lidar will be responsible for mapping the environment. That information will be used to match the geo-tag from localization and the gas concentration level.
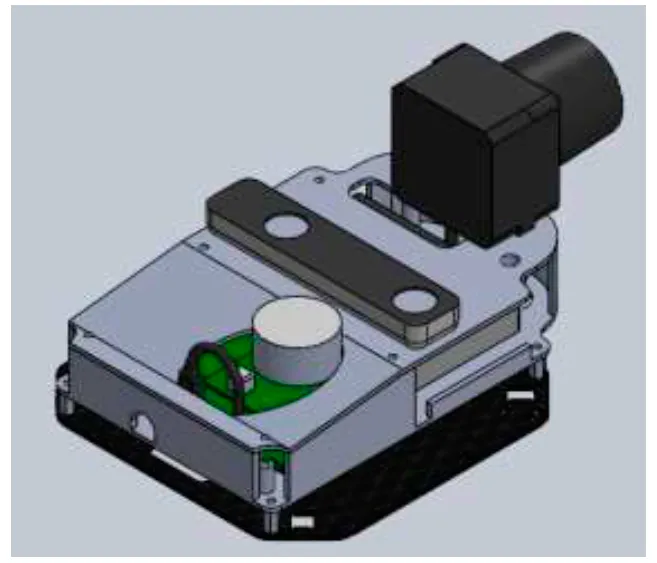
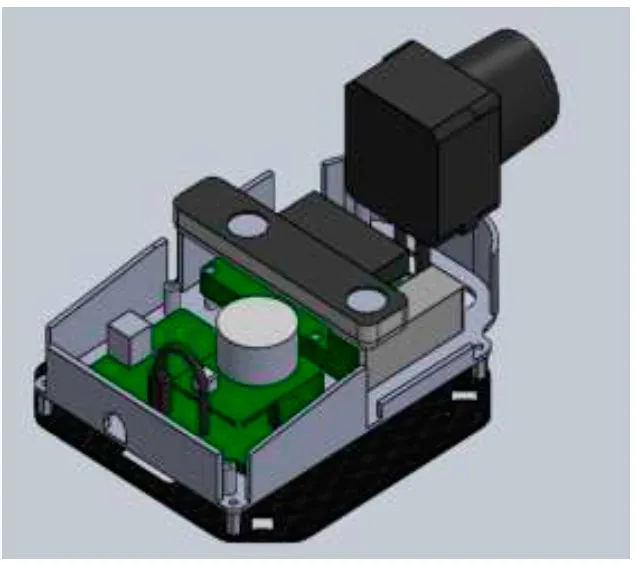
The payload will be placed above the top plate to directly access the air and avoid the sensor being affected by the airflow created by the propellers of the UAV. A case will be designed to host all the sensors. Therefore, this will make the payload easy to install on another UAV frame. A first prototype of the design can be seen in and .
. UAV—Closed case with the payload.
. UAV—Open case with the payload.
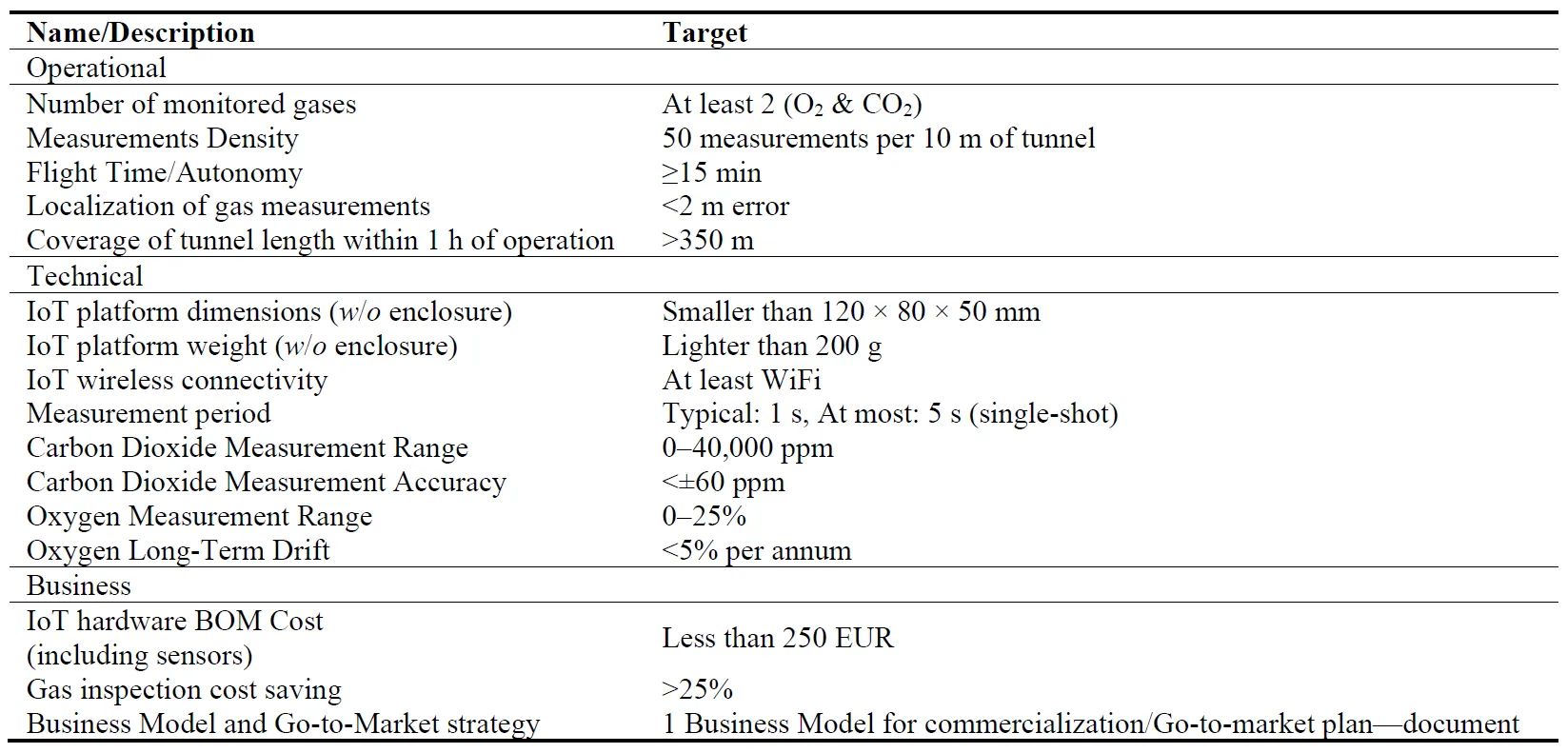
In the initial stage of the project, a set of technical, operational and business KPIs have been identified, as shown in . These indicators form the basis for developing and integrating the necessary technology components. The performance of the final prototype has been evaluated against the specific metrics.
. ECODRONE Project Initial List of KPIs.
4. Results to Proposed Solution
As a contribution of comparative data, measurements of gases, dust and noise are already being carried out at the reference two sites of this study:
- Lavrion Technological and Cultural Park, located in southeastern Attica, Greece. This park was established on the grounds of a former mining site that ceased operations in 1977. Its purpose is to repurpose the existing facilities for various uses while preserving the historical significance of the mines.
- A tunnel project for the construction of new infrastructures to improve the energy efficiency of the WWTP facilities of the Consorcio de Aguas del Huesna located in Villanueva del Río y Minas (Seville), Spain. The total length of this tunnel is 6270 m and its section is 18.23 m2.
These manual measurements have been used as a standard in subsequent analysis with the ECODrone UAV to establish narrower measurement ranges.
Since May 2022, the measurements have been carried out in situ and analyzed by a company authorized by the Government for this type of measurement to comply with Order TEC/1146/2018 of October 22, which approves the complementary technical instruction 04.7.06 “Control of toxic gases in the atmosphere from underground activities in Spain”. The improvement contained in this order on the specific provisions relating to the gas concentration limit in underground activities is in line with the path set by Directive 2017/164/EU, which provides for a transitional period which ends on 21 August 2023.
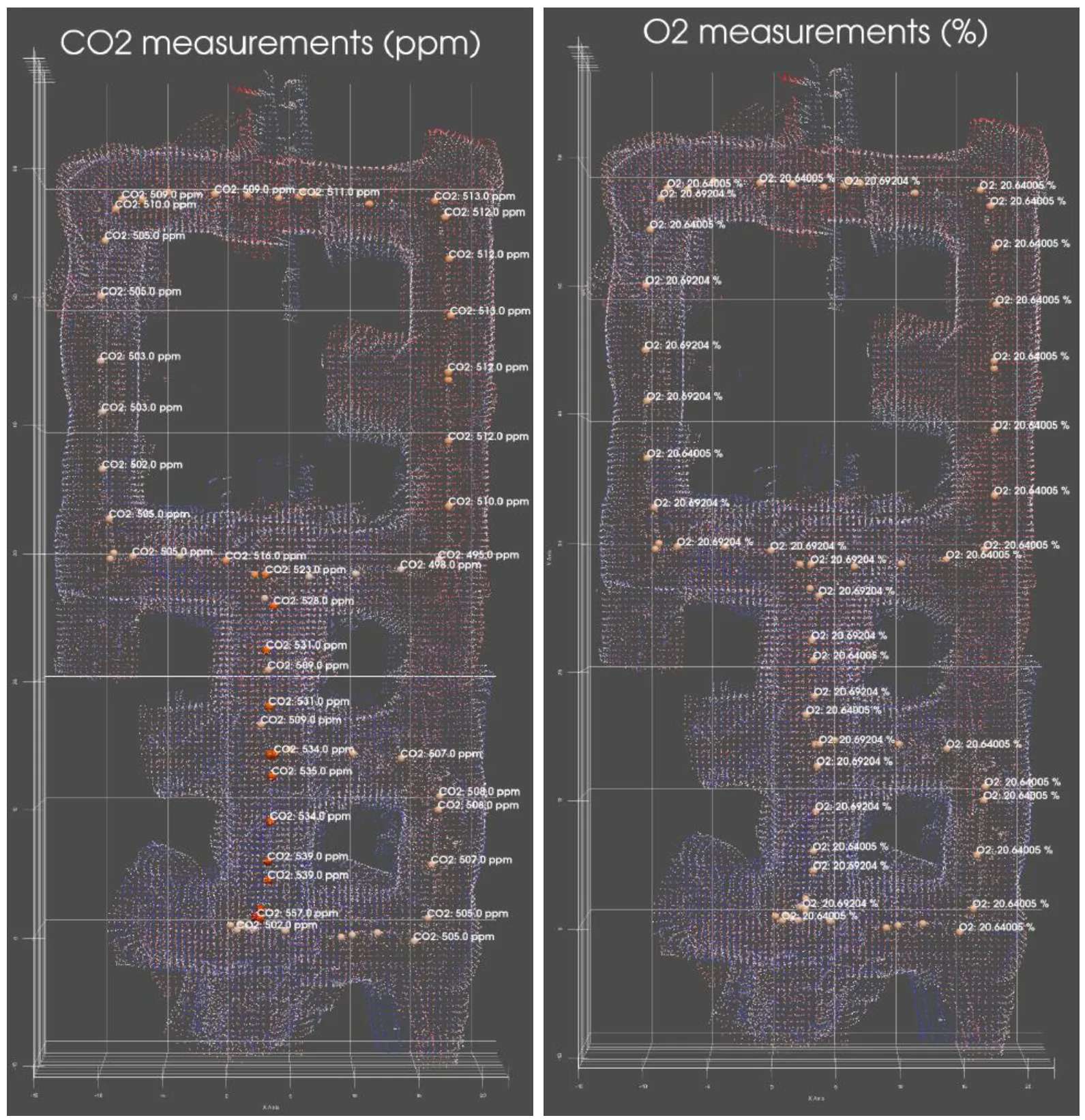
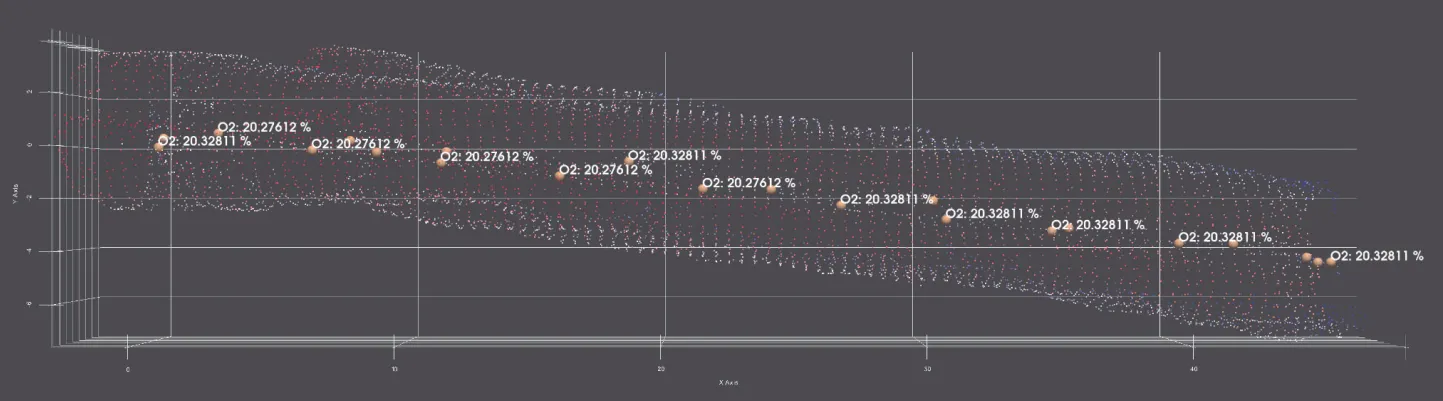
The represents the result of the CO
2 and O
2 measurement processing, showcasing the levels and distribution of CO
2 and O
2 within the mine. (X-axis, distance in metres, Y-axis distance in metres).
. Result of the CO<sub>2</sub> and O<sub>2</sub> measurement processing, showcasing the levels and distribution.
, , and show the comparative values between the values obtained with the UAV equipment and the values taken by the miner with the ALTAIR
® 4XR equipment, validating the value ranges measurable by the aerial equipment and demonstrating the system’s reliability. This new method of measurement in underground works will be a great step forward in controlling safety and prevention in underground works [
13].
. Statistics for the gas measurements that took place outside the mine.
. Statistics for the gas measurements inside the mine.
. Statistics for the CO2 measurements inside the tunnel and the reference values which were measured inside the tunnel.
. Statistics for the O2 measurements inside the mine and the reference values which were measured inside the tunnel.
The shows the reference two sites of this study: Tunnel access (Seville, Spain) and Lavrion Technological and Cultural Park (Attica, Greece).
. Tunnel access (Seville, Spain) and Lavrion Technological and Cultural Park (Attica, Greece).
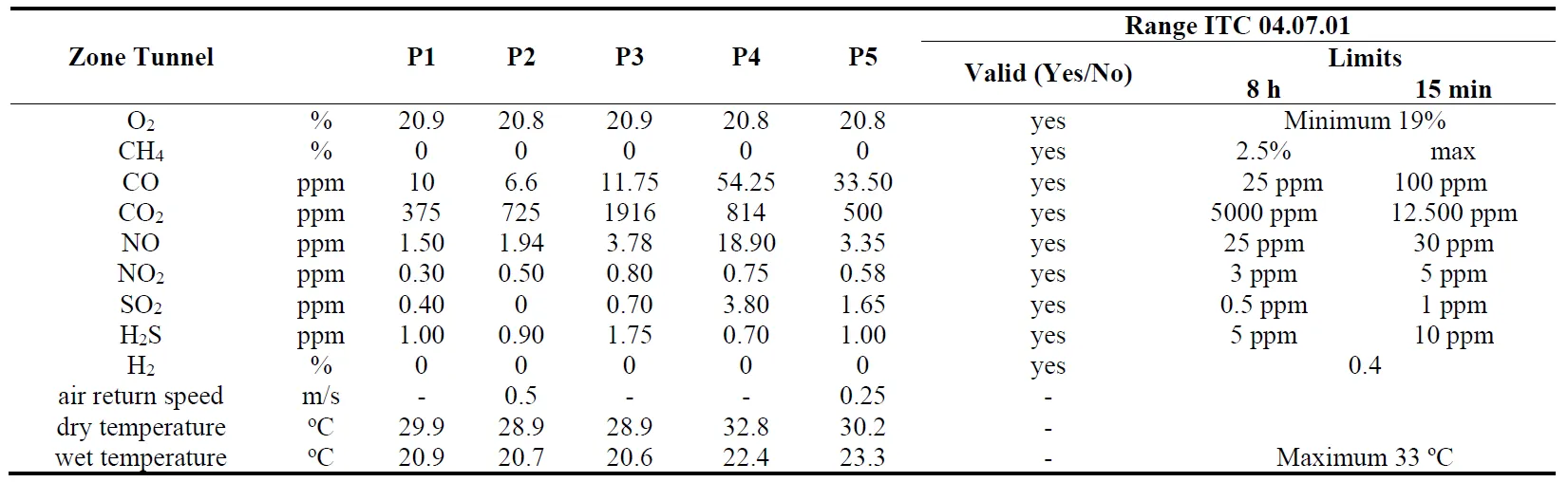
In the tunnel working environment, the following gauging stations have been established:
- P1: North mouth advance face, completed and sealed.
- P2: Return through the north mouth at PK: −30, with the fan at 2041 rpm.
- P3: Advance face of the intermediate mouth, during the staking and surveying.
- P4: South mouth during blast loading work.
- P5: Return at PK:6+085 of the south mouth, with the blower ventilation at 100% but operating only one blower since the other one is out of order.
The values obtained are detailed below in :
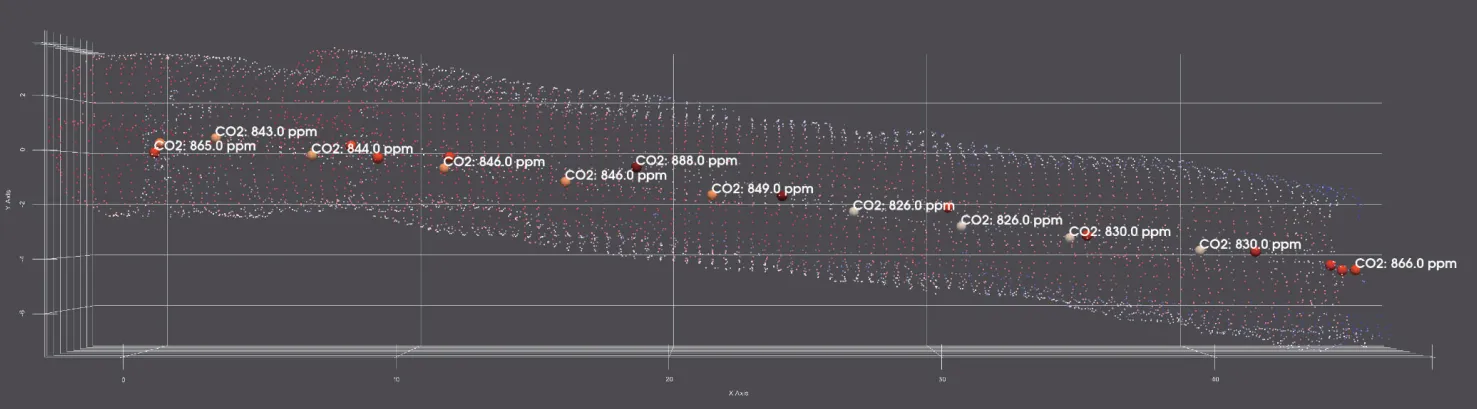
Below are and showing the results of the CO
2 and O
2 measurement processing and the levels and distribution of CO
2 and O
2 inside the tunnel, taken by the UAV.
. The displayed image represents the result of the CO<sub>2</sub> measurement processing, showcasing the levels and distribution of CO<sub>2</sub> within the tunnel. (X-axis, distance in metres, Y-axis UAV flight height in metres).
. The displayed image showcases the measurements of O<sub>2</sub> levels, revealing the distribution of oxygen within the tunnel. (X-axis, distance in metres, Y-axis UAV flight height in metres).
ECODrone provides higher CO
2 records with respect to the values provided by the authorized laboratory. This is due to its lower weight with respect to O
2, CO
2 is displaced and accumulated in higher concentration at the top of the tunnel section. Depending on the flight height of the drone, the CO
2 concentration is higher, while the measurement with the fixed device always refers to the height of the waist of the person that carries it. The environments in which the drone and fixed equipment are measured differ [
14].
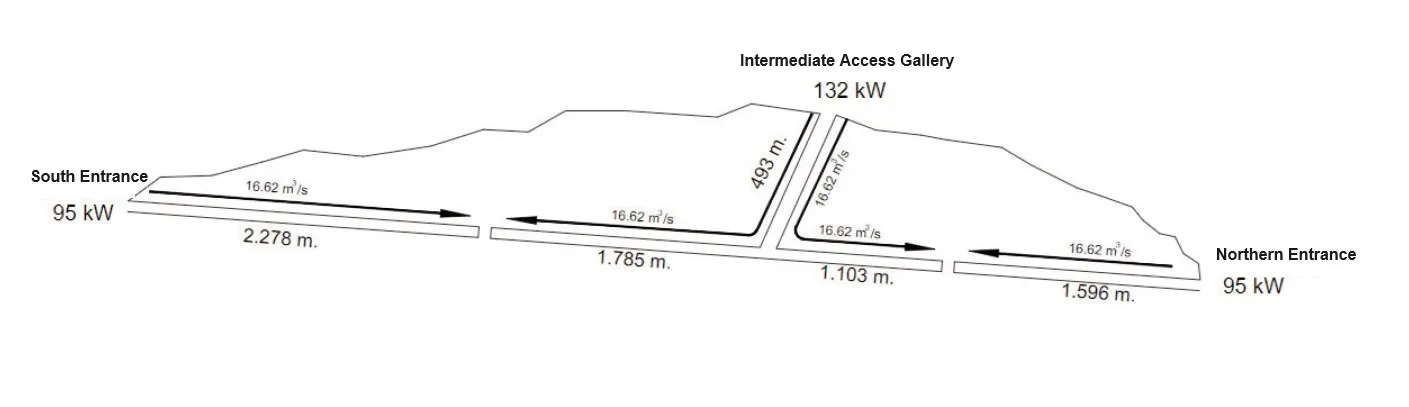
The flight took place in the area highlighted in yellow in , corresponding to the intermediate mouth.
. Tunnel construction scheme.
, , and show some moments of the drone’s flight. show after landing the drone, the engineers inspect the data captured and read a map with the distribution of the gas measurements inside the tunnel.
. The drone moving along the tunnel in a low-light spot.
. The UAV returning to the operator.
. After landing the drone, engineers inspect the data captured.
5. Discussion
The objectives of this research were to assess the operability of the UAV, highlight the effective data processing capabilities and emphasise the integration of cutting-edge technologies within the ECODRONE solution. By achieving these objectives, the demonstration aims to validate the feasibility, effectiveness, and potential impact of the ECODRONE prototype in revolutionizing occupational health and safety monitoring in the mining sector [
15].
A primary objective of this assessment was to showcase the functionality and operability of the unmanned aerial vehicle (UAV) developed as part of the ECODRONE project. This included assessing the UAV’s maneuverability, stability, and overall performance within underground mining environments. Assessment emphasised the UAV’s ability to navigate confined spaces, [
16] withstand harsh conditions, and collect real-time data on gas concentrations. By achieving this objective, the assessment aimed to validate the practical applicability of the UAV for occupational health and safety monitoring in underground mining settings.
Another crucial objective of this research was to emphasise the effectiveness of the data processing capabilities within the ECODRONE solution. The focus was on showcasing the system’s ability to collect, analyze and interpret gas concentration [
17] data obtained from the UAV’s integrated multi-gas sensor platform [
18]. Efficient data processing was demonstrated, highlighting the solution’s ability to provide actionable information quickly, enabling timely decision-making and proactive measures to ensure occupational health and safety in mining environments.
Beyond the specific objectives of UAV operability and data processing, it was also intended to demonstrate the successful integration of various cutting-edge technologies within the ECODRONE solution [
19]. This includes showing the seamless integration of robotics, IoT technologies and the multi-gas sensor platform into a unified system. The trial demonstrates seamless coordination and cooperation between these components, underscoring the solution’s overall reliability, scalability, and potential for broader adoption in the mining sector. Achieving a successful integration, the demo aims to show the comprehensive and synergistic nature of the ECODRONE project.
The values measured by the drone and the traditional methods are on the same line and the difference in any of the measurements corresponds to the different flight heights that the drone performs [
20]. The higher the drone flies, the greater the difference between the two methods since CO
2 tends to concentrate in the upper part of the roadway [
21], displacing O
2, while in the traditional method, the meter is carried by the person to the waist height.
Weaknesses and improvements for future research can follow the following lines:
- The battery life of the UVA (actually 30 min) is a problem for underground mining operations with long distances. Future technology, with longer battery life will be able to solve this problem.
- In the future, the ideal work process would imply the location of the UAV. According to the scheduled data collection, it would be controlled on demand from the office.
- It is intended to be applied in the case of fires and underground mining accidents, with significant outgassing and the UVA’s aerial navigation will require to be improved with better positioning sensors.
- With the data obtained from the measurements, it should be possible to generate a map of gas layers that would allow the mine and/or tunnel managers to make immediate decisions about the safety of their miners to avoid accidents. Generating these gas maps will require softwaredevelopment to process and visualise the data obtained by the UAV [
22].
6. Conclusions and Future Works
The assessment conducted as part of the ECODRONE project has effectively showcased an innovative solution for monitoring occupational health and safety in underground environments [
23]. By successfully achieving the objectives of evaluating UAV operability and data processing capabilities and emphasizing the integration of cutting-edge technologies, the immense potential of the ECODRONE solution has been demonstrated [
24].
Moreover, the ECODRONE UAS goes beyond conventional solutions by efficiently monitoring gas levels and generating digital maps of cavities both before and after control lasts. The potential of Building Information Modelling (BIM) will be harnessed to create precise 3D renderings of the cavities, seamlessly integrating their physical and functional features into a comprehensive digital model [
25]. This combination of outputs holds immense value for mining crews, as it allows for the precise and quick assessment of mine safety conditions, encompassing both gas concentrations and wall stability [
26]. This assessment ensures the tunnel is secure for crew entry, enhancing overall safety protocols and operations efficiency and leading the way for responsible sourcing of raw materials. The mining industry is witnessing a significant transformation as key stakeholders increasingly embrace the use of robotic aerial platforms [
27] on a large scale. Moreover, the integration of the smart mining market in Europe is expected to grow from US$ 13.3 billion in 2023 to US$ 22.7 billion by 2028 with a CAGR of 11.3% during the forecast period, driven by a substantial demand for diverse mining services and inspection solutions.
The UAV has shown exceptional maneuverability and stability, demonstrating its ability to navigate through confined spaces and challenging underground conditions [
28]. Its performance surpassed expectations, validating its suitability for real-time gas concentration measurements. The seamless integration of robotics, IoT technologies, and the multi-gas sensor platform into a unified system exemplifies the comprehensive nature of the ECODRONE solution.
Moreover, the data processing capabilities of the solution have proven to be highly effective:
- Accurate O
2 and CO
2 levels identification and comprehensive reporting provide valuable insights for proactive decision-making regarding occupational health and safety. The efficient processing and data analysis have showcased the potential to significantly reduce site inspection time and resource requirements, leading to improved operational efficiency.
- Drones can perform a diverse range of mining applications, from exploration, mapping and surveying to safety maintenance and security enhancements, demonstrating exceptional results in data collection, improved safety and increased productivity.
- It is possible to collect data almost 20 times faster than traditional methods, providing accurate information needed to make decisions faster, resulting in a more productive and efficient operation.
- Typically, mining gas analysis is a time-consuming process. By using drones instead of traditional methods, a mine can save around 70% of the cost and collect unlimited aerial data, including accurate measurements by capturing orthophotos and DSM maps.
- In more complex, dangerous or inaccessible environments, productivity through the use of drones is significantly increased.
- This solution can be applied to collect data in critical areas. In addition, capturing aerial data from blast sites reduces the risk of exposure to such hazards on the ground.
- Fixed gas measurement equipment is located at critical points. Production blasting requires these sensors to be removed to avoid damage or recalibration. In the case of drones, this problem is avoided by developing the flights after blasting.
- The huge amount of data and positions the drone can collect in one flight is equivalent to many fixed sensors with a high cost per unit, placed in different locations in the mine. ECOCODRONE equipment provides a wide range of measurements that add value to the reporting and analysis of the work area.
- This equipment can also be used in rescue work by analysing the atmosphere after a tunnel fire or a mining accident involving the movement of masses of toxic gases.
With equipment such as Ecodrone, it can be said that the future is here, but there are still challenges to be solved as different underground mines pose other challenges.
Acknowledgments
This work was supported in part by the European Union’s Horizon 2020 research and innovation programme under Grant Agreement No. 873149. MINE THE GAP. (https://h2020-minethegap.eu/projects/).
Author Contributions
J.G.G.: Conceptualization, methodology, formal analysis; M.S.: Hardware, Software, Writing—Review & Editing; A.G.: Software, Writing—Review & Editing. All authors have read and agreed to the published version of the manuscript.
Ethics Statement
Not applicable.
Informed Consent Statement
Not applicable.
Funding
This research received no external funding.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
-
1.
Molina Fernández I. 2014 Occupational Risks in the Rodalquilar Mines. Analysis of a Case (1938–1940). Available online: http://hdl.handle.net/10835/2699 2014-05-15 (accessed on 7 June 2024).
-
2.
Torres-Sandoval FA, Murcia-Hurtado DA. Risk from exposure to chemical agents and explosive atmospheres in coal mines in Tópaga, Colombia.
Entramada 2021,
17, 292–304. doi:10.18041/1900-3803/entramado.2.7108.
[Google Scholar]
-
3.
Falla Velázquez NR. Occupational Risks in Large-Scale Mining in Prospecting Stages—Exploration of Metals and Minerals in the south-Eastern Region of Ecuador and Proposal of the Occupational Health and Safety Management Model for Mining Companies in the Zamora Chinchipe Province, p. 66. 2012. Available online: http://www.dspace.uce.edu.ec/handle/25000/861 (accessed on 7 June 2024).
-
4.
Venturi S, Cabassi J, Tassi F, Capecchiacci F, Vaselli O, Bellomo S, et al. Sulfide measurements of Hydrogen in Air by Passive/Diffusive Samplers and High Frequency Analyzer: A Critical Comparison.
Geochem. Appl. 2016,
72, 51–58.
[Google Scholar]
-
5.
Gu Q, Michanowicz DR, Jia C. Development of a Modular Unmanned Aerial Vehicle (UAV) Platform for Air Pollution Profiling.
Sensors 2018,
18, 4363. doi:10.3390/s18124363.
[Google Scholar]
-
6.
Green J. Mine Rescue Robot Requirements: Results from an Industry Workshop. In Proceedings of the Sixth Robotics and Mechatronics Conference 2013 (RobMech), Durban, South Africa, 30–31 October 2013; IEEE Computer Society: Washington, DC, USA, 2013; pp. 111–116. doi:10.1109/RoboMech.2013.6685501.
-
7.
Shahmoradi J, Talebi E, Roghanchi P, Hassanalian M. A Comprehensive Review of the Applications of Drone Technology in the Mining Industry.
Drones 2020,
4, 34. doi:10.3390/drones4030034.
[Google Scholar]
-
8.
ALTAIR® 4X Mining Multigas Detector. Available online: https://us.msasafety.com/p/000080001600001030 (accessed on 7 June 2024).
-
9.
The iBrid MX6 Multi-Gas Monitor. Available online: https://www.indsci.com/en/gas-detectors/multi/mx6-ibrid(accessed on 7 June 2024).
-
10.
Dräger X-am 5300. Available online: https://www.draeger.com/en_uk/Products/X-dock-5300-6300-6600(accessed on 7 June 2024).
-
11.
García González H, González García J, González-Cachón Fernández S, Pellicer Mateos S. Nitrogen oxide levels in tunnel construction with the NATM during the transition period of Directive 2017/164/EU.
Constr. Rep. 2022,
74, e439. doi:10.3989/ic.82778.
[Google Scholar]
-
12.
insigh.io: Embedding Intelligence in the IoT Ecosystem. Available online: https://insigh.io/ (accessed on 7 June 2024).
-
13.
Andaluz VH, Chicaiza FA, Cuzco G, Carvajal CP, Ortiz, JS, Morales J, et al. Autonomous Monitoring of Air Quality through an UAV’s. At International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems; Springer: Cham, Switzerland, 2019; pp. 146–157. doi:10.1007/978-3-030-22999-3_14.
-
14.
Gu Q, Jia C. A consumer UAV-based air quality monitoring system for smart cities. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019, pp. 1–6. doi:10.1109/ICCE.2019.8662050.
-
15.
Göktoǧan AH, Sukkarieh S, Bryson M, Randle J, Lupton T, Hung C. A rotary-winged unmanned aerial vehicle for surveillance and management of aquatic weeds.
J. Intell. Robot. Syst. 2010,
57, 467–484. doi:10.1007/s10846-009-9371-5.
[Google Scholar]
-
16.
Dallal Bashi O-H. Autonomous Flight Algorithm of a Quadcopter Sensing System for Measuring Methane Gas Concentration In Landfill 2018. Available online: http://psasir.upm.edu.my/id/eprint/71452/ (accessed on 7 June 2024).
-
17.
Dunbabin M, Marques L. Robots for Environmental Monitoring: Significant Advances and Applications.
IEEE Robot. Autom. Mag. 2012,
19, 24–39. doi:10.1109/MRA.2011.2181683.
[Google Scholar]
-
18.
Aurell J, Mitchell W, Chirayath V, Jonsson J, Tabor D, Gullett B. Field Determination of Multi-Pollutant Open Area Combustion Source Emission Factors with a Hexacopter UAV* 2017. Available online: http://dx.doi.org/10.1016/j.atmosenv.2017.07.046 (accessed on 7 June 2024).
-
19.
Li B, Cao R, Wang Z, Song RF, Peng ZR, Xiu G, et al. Use of multi-rotor UAVs for detailed monitoring of air pollution on roads.
Transp. Investig. Rec. 2019,
2673, 169–180.
[Google Scholar]
-
20.
Li S, Xi T, Tian Y, Wang W. Infer fine-grained PM2.5 with Bayesian-based kernel method for crowdsourcing system. In Proceedings of the GLOBECOM 2017–2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017, pp. 1–6. doi:10.1109/GLOCOM.2017.8254421.
-
21.
Shi L, Wang X, Zhang T, Hu C, Luo K, Bai B. Four-Rotor Drone System Development for Hazardous Gas Detection. In Proceedings of the 2016 IEEE ICMA, Harbin, China, 7–10 August 2016, pp. 2461–2465.
-
22.
Li XB, Wang DS, Lu QC, Peng ZR, Lu SJ, Li B, et al. Three-dimensional investigation of ozone pollution in the lower troposphere using an unmanned aerial vehicle platform.
Environ. Pollut. 2017,
224, 107–116. doi:10.1016/j.envpol.2017.01.064.
[Google Scholar]
-
23.
Li XB, Wang DS, Lu QC, Peng ZR, Wang ZY. Investigate vertical distribution patterns of PM2.5 in the lower troposphere using UAV measurements.
Atmos. Environ. 2018,
173, 62–71. doi:10.1016/j.atmosenv.2017.11.009.
[Google Scholar]
-
24.
McGonigle AJS, Aiuppa A, Giudice G, Tamburello G, Hodson AJ, Gurrieri S. UAV measurements of volcanic carbon dioxide fluxes.
Geophysical. Res. Latv. 2008,
35, L06303. doi:10.1029/2007GL032508.
[Google Scholar]
-
25.
Qiu S, Chen B, Wang R, Zhu Z, Wang Y, Qiu X. Pollution source estimation in chemical industry park using a platform UAV-based monitoring system, an artificial neural network, and scattering simulation.
Adv. CSR 2017,
7, 39726–39738. doi:10.1039/c7ra05637k.
[Google Scholar]
-
26.
Rohi G, Ejofodomi O, Ofualagba G. Autonomous monitoring, analysis and fight against air pollution using environmental drones.
Heliyon 2020,
6, e03252. doi:10.1016/j.heliyon.2020.e03252.
[Google Scholar]
-
27.
Rossi M, Brunelli D. Gas Detection in Unmanned Vehicles: Challenges and Opportunities. In Proceedings of the 2017 New Generation of CAS (NGCAS), Genova, Italy, 6–9 September 2017. doi:10.1109/NGCAS.2017.58.
-
28.
Xiang T-Z, Xia G-S, Zhang L. Mini-UAV Based Remote Sensing: Techniques, Applications, and Prospects. arXiv 2018, arXiv:1812.07770v1.
 Michael Striligás
2,*
Antonis Gotsis
3,*
Michael Striligás
2,*
Antonis Gotsis
3,*